



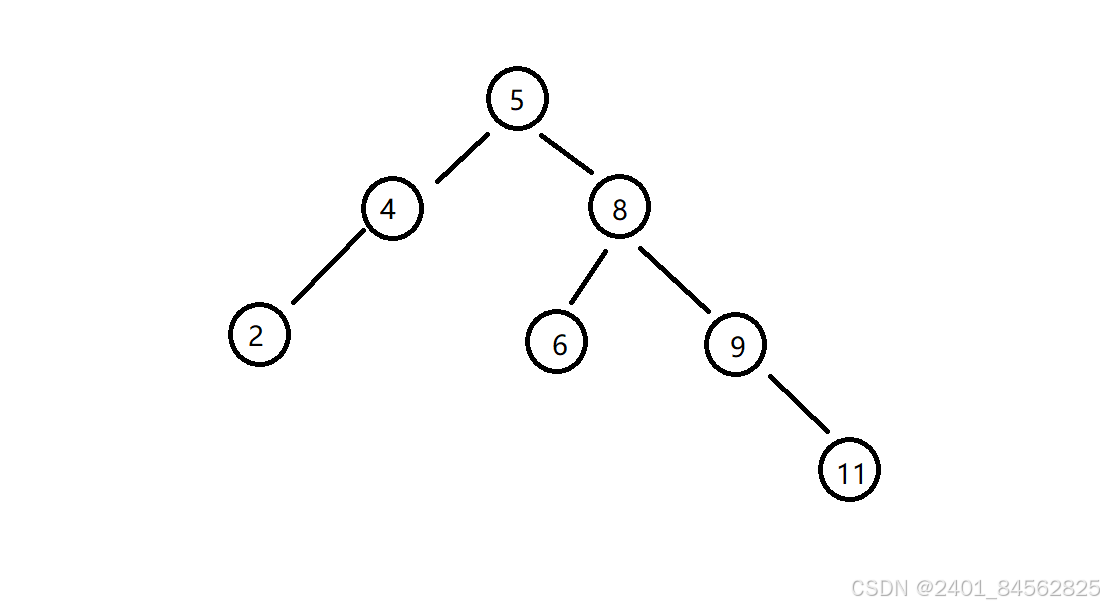
二叉搜索树
⼆叉搜索树⼜称⼆叉排序树
若它的左⼦树不为空,则左⼦树上所有节点的值都⼩于根节点的值
若它的右⼦树不为空,则右⼦树上所有节点的值都⼤于根节点的值
它的左右⼦树也分别为⼆叉搜索树
搜索树的插入
若根节点不为空:
如果根节点key==查找key 返回true查找key在其左子树查找如果根节点key >
在其右子树查找如果根节点key < 查找key 在
否则 返回false
二叉搜索树的效率
最优情况下,⼆叉搜索树为完全⼆叉树,其平均⽐较次数为: O(logN)
最差情况下,⼆叉搜索树退化为单⽀树,其平均⽐较次数为: N
Map和set
Map和set是⼀种专⻔⽤来进⾏搜索的容器或者数据结构,其搜索的效率与其具体的实例化⼦类有关。
以前常⻅的搜索⽅式有: 1. 直接遍历,时间复杂度为O(N),元素如果⽐较多效率会⾮常慢
2. ⼆分查找,时间复杂度为,但搜索前必须要求序列是有序的
上述排序⽐较适合静态类型的查找,即⼀般不会对区间进⾏插⼊和删除操作
⽽现实中的查找可能在查找时进⾏⼀些插⼊和删除的操作,即动态查找,那上述两种⽅式就不太适合了,本节介绍的 Map和Set是⼀种适合动态查找的集合容器。
⼀般把搜索的数据称为关键字(Key),和关键字对应的称为值(Value),将其称之为Key-value的键 值对,
所以模型会有两种:
1. 纯key模型,⽐如: ◦ 有⼀个英⽂词典,快速查找⼀个单词是否在词典中 ◦ 快速查找某个名字在不在通讯录中
2. Key-Value模型,⽐如: ◦ 统计⽂件中每个单词出现的次数,统计结果是每个单词都有与其对应的次数
⽽Map中存储的就是key-value的键值对,Set中只存储了Key。
关于Map的说明
Map是⼀个接⼝类,该类没有继承⾃Collection,该类中存储的是结构的键值对,并且K⼀定是 唯⼀的,不能重复
关于Map.Entry<k,v> 的说明
Map.Entry<k,v>是Map内部实现的⽤来存放<key,value>键值对映射关系的内部类,该内部类中主 要提供了<key,value>的获取,value的设置以及Key的⽐较⽅式。
需要注意的是Map.Entry<k,v>并没有提供设置Key的⽅法
1,Map是⼀个接⼝,不能直接实例化对象,如果要实例化对象只能实例化其实现类TreeMap或者 HashMap
2. Map中存放键值对的Key是唯⼀的,value是可以重复的
3. 在TreeMap中插⼊键值对时,key不能为空,否则就会抛NullPointerException异常,value可以 为空。但是HashMap的key和value都可以为空。
4. Map中的Key可以全部分离出来,存储到Set中来进⾏访问(因为Key不能重复)。
5. Map中的value可以全部分离出来,存储在Collection的任何⼀个⼦集合中(value可能有重复)。
6. Map中键值对的Key不能直接修改,value可以修改,如果要修改key,只能先将该key删除掉,然 后再来进⾏重新插⼊
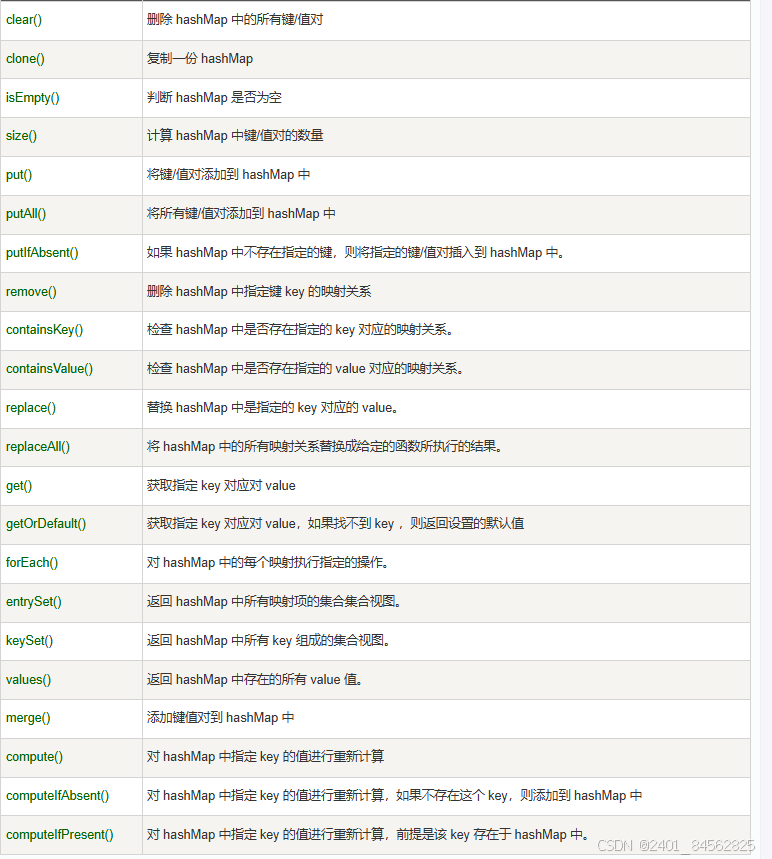
map的方法
关于set的说明
Set与Map主要的不同有两点:Set是继承⾃Collection的接⼝类,Set中只存储了Key。
1. Set是继承⾃Collection的⼀个接⼝类
2. Set中只存储了key,并且要求key⼀定要唯⼀
3. TreeSet的底层是使⽤Map来实现的,其使⽤key与Object的⼀个默认对象作为键值对插⼊到Map中 的
4. Set最⼤的功能就是对集合中的元素进⾏去重
5. 实现Set接⼝的常⽤类有TreeSet和HashSet,还有⼀个LinkedHashSet,LinkedHashSet是在 HashSet的基础上维护了⼀个双向链表来记录元素的插⼊次序。
6. Set中的Key不能修改,如果要修改,先将原来的删除掉,然后再重新插⼊
7. TreeSet中不能插⼊null的key,HashSet可以。
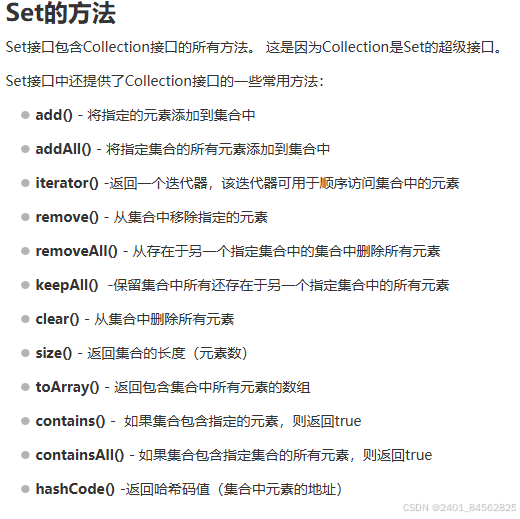
set的方法
哈希表
顺序结构以及平衡树中,元素关键码与其存储位置之间没有对应的关系,因此在查找⼀个元素时,必 须要经过关键码的多次⽐较。顺序查找时间复杂度为O(N),平衡树中为树的⾼度,即O(),搜索的效率 取决于搜索过程中元素的⽐较次数。 理想的搜索⽅法:可以不经过任何⽐较,⼀次直接从表中得到要搜索的元素。如果构造⼀种存储结 构,通过某种函数(hashFunc)使元素的存储位置与它的关键码之间能够建⽴⼀⼀映射的关系,那么在 查找时通过该函数可以很快找到该元素。
插⼊元素
根据待插⼊元素的关键码,以此函数计算出该元素的存储位置并按此位置进⾏存放
搜索元素
对元素的关键码进⾏同样的计算,把求得的函数值当做元素的存储位置,在结构中按此位置取元素 ⽐较,若关键码相等,则搜索成功
该⽅式即为哈希(散列)⽅法,哈希⽅法中使⽤的转换函数称为哈希(散列)函数,构造出来的结构称为哈 希表(HashTable)(或者称散列表)
⽤该⽅法进⾏搜索不必进⾏多次关键码的⽐较,因此搜索的速度⽐较快
哈希冲突
什么是哈希冲突
不同关键字通过相同哈希函数计算出相同的哈希地址,该种现象称为哈希冲突或哈希碰撞。 把具有不同关键码⽽具有相同哈希地址的数据元素称为“同义词”
如何避免哈希冲突
冲突的发⽣是必然的,但我们能做的应该是尽量的降低冲突率。
1,引起哈希冲突的⼀个原因可能是:哈希函数设计不够合理。
常见哈希函数
1. 直接定制法: 取关键字的某个线性函数为散列地址:Hash(Key)=A*Key+B优点:简单、均匀缺点:需 要事先知道关键字的分布情况使⽤场景:适合查找⽐较⼩且连续的情况
2.除留余数法--(常⽤) 设散列表中允许的地址数为m,取⼀个不⼤于m,但最接近或者等于m的质数p作为除数,按 照哈希函数:Hash(key)=key%p(p<=m),将关键码转换成哈希地址
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ 2,负载因⼦调节
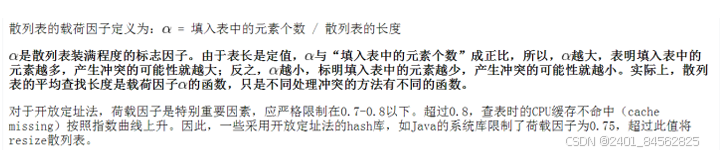
所以当冲突率达到⼀个⽆法忍受的程度时,我们需要通过降低负载因⼦来变相的降低冲突率。 已知哈希表中已有的关键字个数是不可变的,那我们能调整的就只有哈希表中的数组的⼤⼩。
解决冲突
闭散列
解决哈希冲突两种常⻅的⽅法是闭散列和开散列
也叫开放地址法,当发⽣哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位 置,那么可以把key存放到冲突位置中的“下⼀个”空位置中去。
如何寻找下一个空位置?
线性探测
从发⽣冲突的位置开始,依次向后探测,直到寻找到下⼀个空位置为⽌。
通过哈希函数获取待插⼊元素在哈希表中的位置 ◦
如果该位置中没有元素则直接插⼊新元素,如果该位置中有元素发⽣哈希冲突,使⽤线性探测 找到下⼀个空位置,插⼊新元素
⼆次探测
线性探测的缺陷是产⽣冲突的数据堆积在⼀块,这与其找下⼀个空位置有关系,因为找空位置的⽅式 就是挨着往后逐个去找,因此⼆次探测为了避免该问题。。。。
开散列/哈希桶
开散列法⼜叫链地址法(开链法),⾸先对关键码集合⽤散列函数计算散列地址,具有相同地址的关键码 归于同⼀⼦集合,每⼀个⼦集合称为⼀个桶,各个桶中的元素通过⼀个单链表链接起来,各链表的头 结点存储在哈希表中。
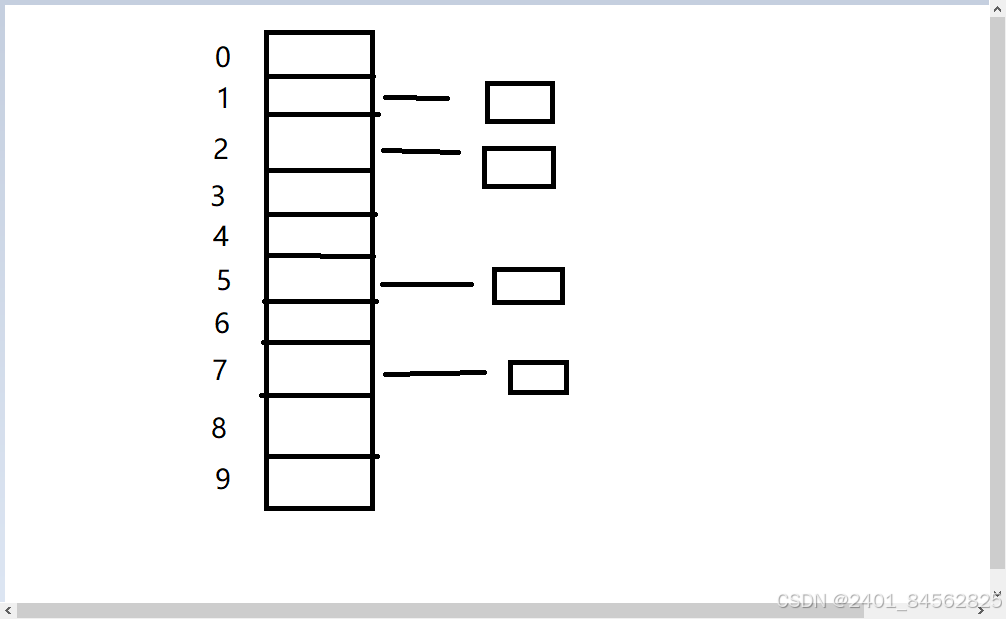
开散列,可以认为是把⼀个在大集合中的搜索问题转化为在⼩集合中做搜索了。
冲突严重时的解决办法
哈希桶其实可以看作将⼤集合的搜索问题转化为⼩集合的搜索问题,那如果冲突 严重,就意味着⼩集合的搜索性能其实也时不佳的,这个时候我们就可以将这个所谓的⼩集合搜索问 题继续进⾏转化,例如:
1.每个桶的背后是⼀棵搜索树
2.每个桶的背后是另⼀个哈希表
3.哈希函数重新设计


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









