







先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年最新Golang全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上Go语言开发知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
如果你需要这些资料,可以添加V获取:vip1024b (备注go)

正文
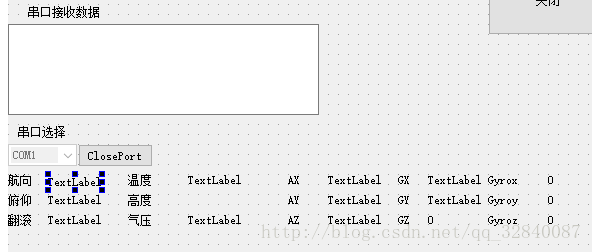
首先是IMU传感器的上位机
和最简单的上位机比起来,我们需要增加一个数据解析部分,也就是将接受到的传感器信息进行译码,得到我们可以直接读取的信息。我们可以从传感器的说明书上得到数据的通讯协议 比如这个
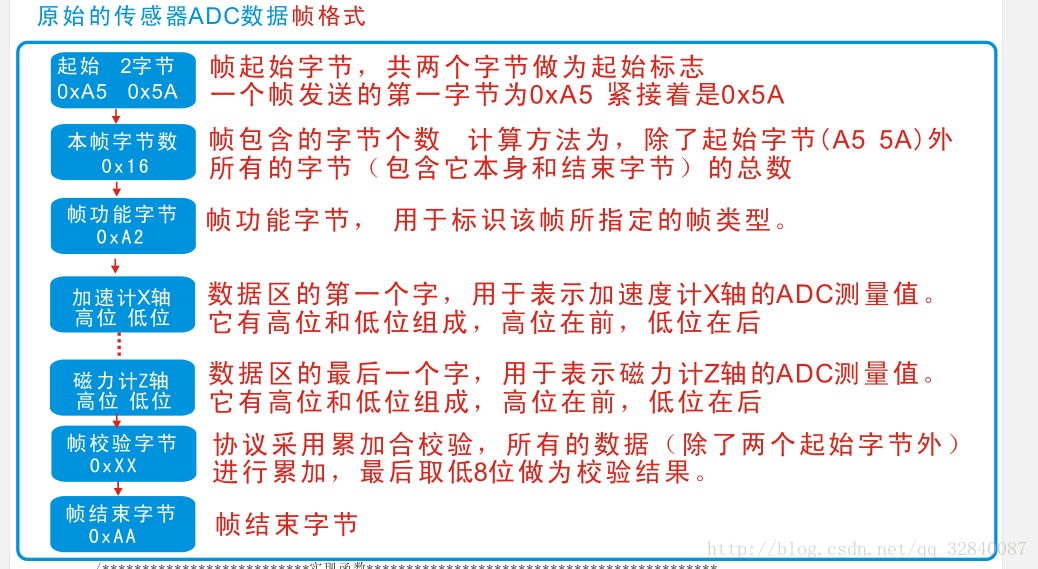
那么从这里我们可以知道 以A5 5A为头 AA为尾的这样一组数据就是我们要进行译码的数据。
我们利用readall()函数读到的的内容是一存到了requestData中,数据类型为Qbytearry(数组类型Qbytearry为QT中独特的数据类型,既可以存储字符串,又可以存储数)我们可以转化为整型(int类型)再进行进一步解算。(对于计算机来说0x01和1没有区别)
这里先将requestData存入缓冲区然后进行转存到str(string字符串类型存入其中数据以字符串形式存入)中,
。由于每一段的数据帧的长度为20个字节所以识别头0xaa到尾0xa2的长度应该为20字节然后 这二十个字节的数据分别存到了record[1]到record[20]中,令尾部0xaa为k那么距离他21个字节处便是0xa2,record1[k-19]和record1[k-19]便分别为加速度数据的高8位和低8位,高8位乘上256(2的8次方)加上低8位=t1.t1便是带符号的最终数据,最后将t1与0x8000做与运算判断最高位符号位,并做处理。
最终显示在面板上的数据 加速x.对其他数据依次做这样处理,依次显示在面板上.效果图如下。
ACX.sprintf(“%f”,t1*(9.8)/4089);
if(!requestData1.isEmpty())
{ long len,k;
QBuffer buffer(&requestData1);
//只写模式打开缓冲区
buffer.open(QIODevice::ReadWrite);
buffer.write(requestData1);
if(!requestData1.isEmpty())
{
//qDebug()<<“1”;
static quint8 record[2048];
static quint8 record1[2048];
const char*str =buffer.data();
const char*str1 =buffer.data();
len =buffer.size();
for(k=0;k<len;k++)
{
// qDebug()<<“2”;
record1[k]=(quint8)str1[k];
if (record1[k]== 0xAA)
{ if(record1[k-20]== 0xA2)
{ //qDebug()<<“2”;
int t1=record1[k-19]*256+record1[k-18];
if(t1&0x8000)
{
t1 = 0-(t1&0x7fff);
} else
t1 = (t1&0x7fff);
ACX.sprintf(“%f”,t1*(9.8)/4089);
ui->AX->setText(ACX);
——————————————————————————————————————————————————————————-——————————————————————————————————————————————-----—————
激光雷达部分
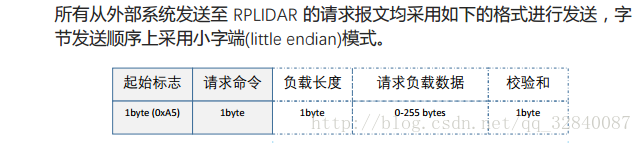
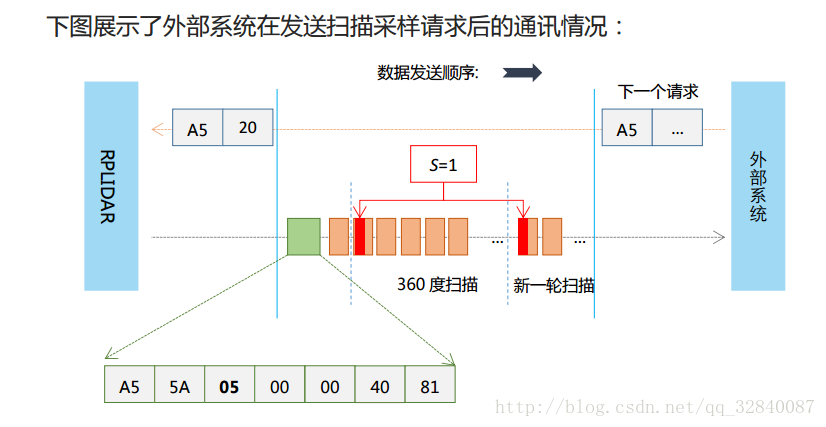
阅读说明书可以看到雷达基本通讯模式“与 RPLIDAR 进行的通讯采用非文本形式的二进制数据报文进行,且每个数据报文均具有统一的报头数据格式。外部系统在发送开始扫描的请求后,RPLIDAR 将开始连续的扫描测距。在每次测距操作完成后,对应的测距采样点的信息(距离、角度等)将通过一个独立应答包的形式发送至外部系统。在这个模式下,外部系统只需要发送单次的请求,并开始连续接受来自 RPLIDAR 的多个应答数据文报。”
请求报文格式
常用请求报文
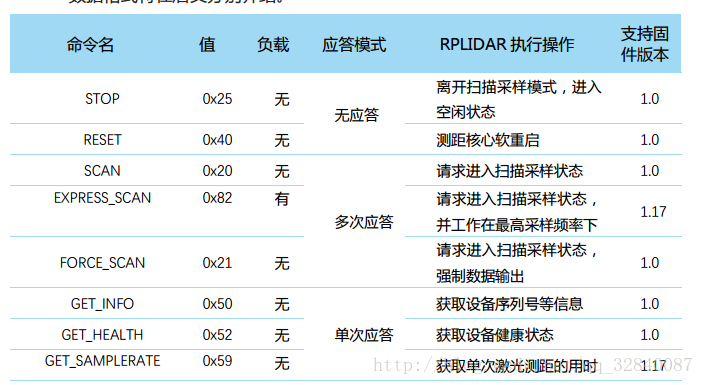
开始扫描采样(SCAN)命令请求与回应数据格式:
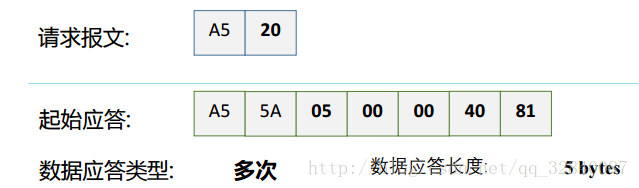
PLIDAR 工作在空闲状态时,在外部系统发送了该请求后,将开始进入测距采样。每个测距采样点将使用数据应答报文发送至外部系统。如果 RPLIDAR先前已经工作在测距采样状态,则 RPLIDAR 首先将停止正在进行的测距采样功能,并重新开始新一轮的测距采样操作。
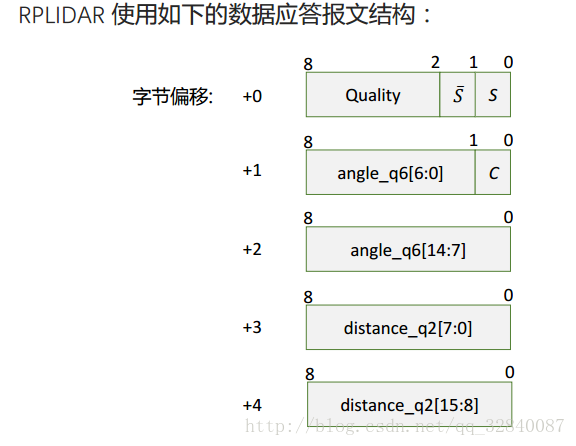
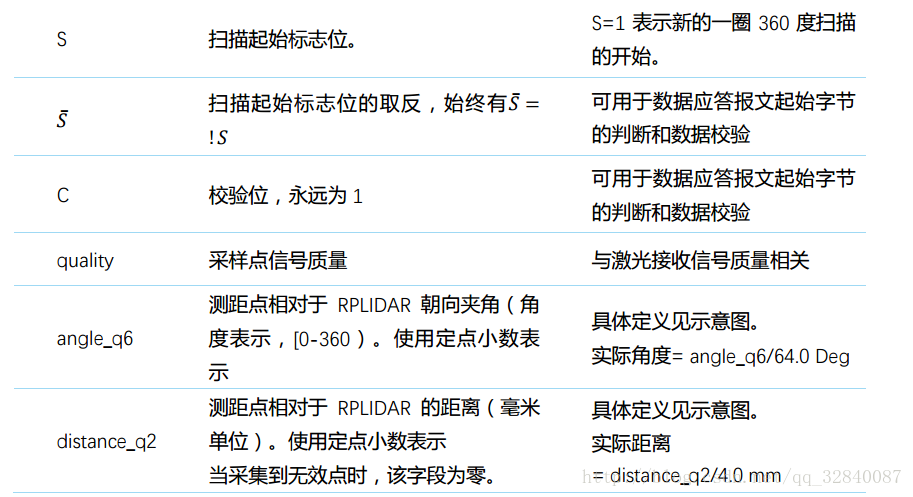
在收到起始应答回复之后雷达开始不断返回采集的数据。每五个字节为一组,第一个字节第一位是标志位,第二位是取标志位的反,他们两个在任何时刻一个为0,另一个必为1,第二个字节第一位是校验位,通过这三个字节我们可以验证编写的是否有错误。第一字节的第三位到第8位是信号质量。第二个字节的第二位到第8位为角度angel的低7位,第3个字节为第8位到第14位。
第四个字节和第五个字节分别为距离distance的低8位与高8位。
数据的存储
按下界面上的开始采集按钮,同时开始IMU与激光雷达数据采集,IMU数据的采集,采集的面板数据,采用定时器Qtimer定时,每20ms向IMU数据中写入换行符 进行换行。每行
激光雷达则是将换行符写入了存储数据的循环内,每行为512个采样点,约为0.25s。
激光雷达数据
void Widget::on_kscj_clicked()
{//在c盘下创建以开始采集时间命名的激光雷达数据文档
serial.open(QIODevice::ReadWrite);
QDateTime time = QDateTime::currentDateTime();
QString date = time.toString("yyyy-MM-dd hh-mm-ss "); //设置显示格式
fileName = “C:/” + date + “.txt”;
file.setFileName(fileName);
if(!file.open(QIODevice::ReadWrite | QIODevice::Text))
serial.write(StringToHex(“A5 25”));
serial.write(StringToHex(“A5 20”));
ui->stateLab->setText(“当前状态 : 普通扫描指令已经发送”);
//在d盘下创建以开始采集时间命名的IMU数据文档
fileName1 = “D:/” + date + “.txt”;//
file1.setFileName(fileName1);
}
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip1024b (备注Go)

一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
fileName1 = “D:/” + date + “.txt”;//
file1.setFileName(fileName1);
}
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip1024b (备注Go)
[外链图片转存中…(img-KWGqoNXh-1713462141171)]
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!

















 1520
1520

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









