




已解答
简单
相关标签
相关企业
提示
给你一个整数 n 和一个整数数组 rounds 。有一条圆形赛道由 n 个扇区组成,扇区编号从 1 到 n 。现将在这条赛道上举办一场马拉松比赛,该马拉松全程由 m 个阶段组成。其中,第 i 个阶段将会从扇区 rounds[i - 1] 开始,到扇区 rounds[i] 结束。举例来说,第 1 阶段从 rounds[0] 开始,到 rounds[1] 结束。
请你以数组形式返回经过次数最多的那几个扇区,按扇区编号 升序 排列。
注意,赛道按扇区编号升序逆时针形成一个圆(请参见第一个示例)。
示例 1:
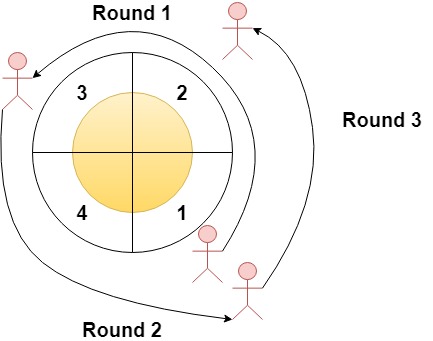
输入:n = 4, rounds = [1,3,1,2] 输出:[1,2] 解释:本场马拉松比赛从扇区 1 开始。经过各个扇区的次序如下所示: 1 --> 2 --> 3(阶段 1 结束)--> 4 --> 1(阶段 2 结束)--> 2(阶段 3 结束,即本场马拉松结束) 其中,扇区 1 和 2 都经过了两次,它们是经过次数最多的两个扇区。扇区 3 和 4 都只经过了一次。
示例 2:
输入:n = 2, rounds = [2,1,2,1,2,1,2,1,2] 输出:[2]
示例 3:
输入:n = 7, rounds = [1,3,5,7] 输出:[1,2,3,4,5,6,7]
class Solution {
public:
vector<int> mostVisited(int n, vector<int>& rounds) {
vector<int> res;
int begin = rounds[0];
int end = rounds[rounds.size() - 1];
if (begin > end) {
for (int i = 1; i <= end; i++) {
res.push_back(i);
}
for (int i = begin; i <= n; i++) {
res.push_back(i);
}
}
else if (begin <= end) {
for (int i = begin; i <= end; i++) {
res.push_back(i);
}
}
return res;
}
};提示:
2 <= n <= 1001 <= m <= 100rounds.length == m + 11 <= rounds[i] <= nrounds[i] != rounds[i + 1],其中0 <= i < m
代码:

















 237
237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









