







前言:本篇文章我们继续来分享C++中的另一个复杂数据结构——红黑树。
目录
一.红黑树概念
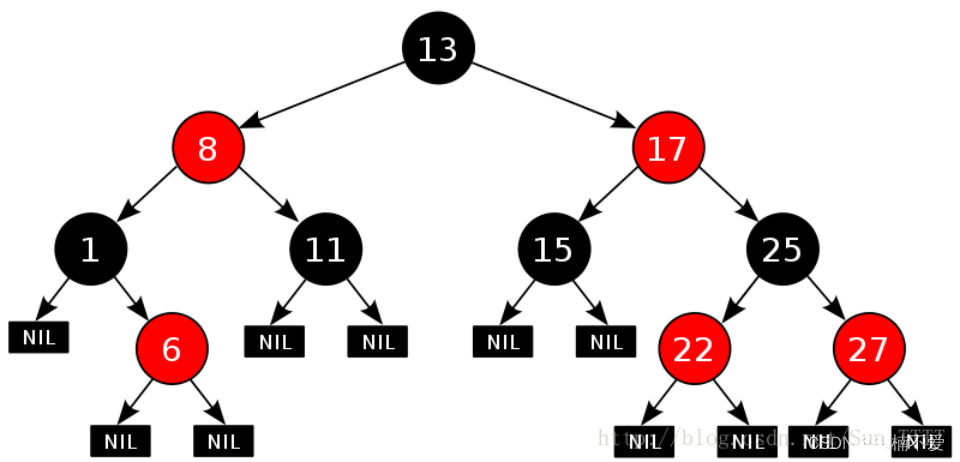
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出两倍,因而是接近平衡的。
二.红黑树性质
-
每个结点不是红色就是黑色
-
根节点是黑色的
-
如果一个节点是红色的,则它的两个孩子结点是黑色的(不存在连续的红色节点)
-
对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点(每条路径都存在相同数量的黑色节点)
-
每个叶子结点都是黑色的(此处的叶子结点指的是空结点NULL)
如何理解红黑树最长路径不超过最短路径的二倍呢???
- 从性质能够看出,红黑树每一条路径上,都有相同数量的黑色节点。
- 红黑树每条路径上可以存在连续的黑色节点,但不能存在连续的红色节点。
- 所以最短路径即为全是黑色节点的路径。
- 最长路径则为一黑一红相间的路径。
三.红黑树实现
1.基本框架
红黑树与AVL树相比,多了节点颜色这一信息,为了实现这一信息,我们使用枚举:
enum Colour
{
RED,
BLACK
};
template<class K,class V>
struct RBTreeNode
{
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
pair<K, V> _kv;
Colour _col;
RBTreeNode(const pair<K, V>& kv)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _kv(kv)
,_col(RED)
{}
};
template<class K, class V>
class RBTree
{
typedef RBTreeNode<K, V> Node;
public:
private:
Node* _root = nullptr;
size_t _size = 0;
};同时我们多创建一个_size成员变量,用于记录节点数量。
2.插入
红黑树插入的基本步骤与二叉搜索树和AVL树一样,都是按照左子节点比根节点小,右子节点比根节点大的规则,唯一不同的是,红黑树的插入要考虑其性质。其中最值得注意的性质为:
- 不存在连续的红节点
- 每条路径上的黑节点数相等
其中能够看出,第二条才是最关键的,因此我们每次新插入节点时,必须插入红节点。
此时我们会面临<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1348
1348

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











