







步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角),多用于雕刻机、3D打印机等需要精确控制的设备。本篇使用ULN2003驱动五线四相减速步进电机。
1. 步进电机介绍
步进电机每次能转动的最小角度叫做步距角。
每当步进电机接收到一个驱动信号后,步进电机将按照一定的方向转动一个固定的角度。
通过控制脉冲的个数来精确的控制步进电机的角位移量,通过控制脉冲的频率来控制电机转动的速度及加速度,从而达到调速的目的。
步进电机按照相数不同分为单相、双相、多相三种,励磁方式分为1相励磁方式和2相励磁方式。
本篇使用的步进电机型号为28BYJ-48,1相励磁方式驱动,通过给ABCD四相依次通电来实现转自不停转动。

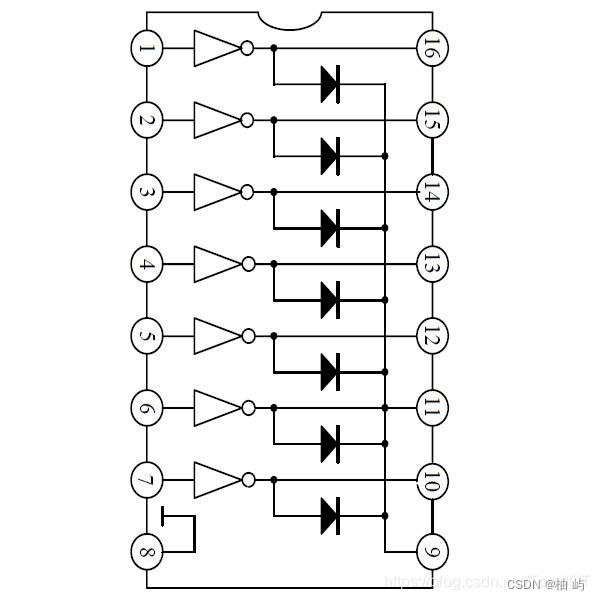
2. ULN2003驱动介绍
由于Arduino开发板的通用IO驱动能力有限,有些外设不能直接使用IO进行驱动,需要借助一些驱动电路间接控制大功率器件。ULN2003是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中,可直接驱动继电器等负载
3. 实验材料
Uno R3开发板
配套USB数据线
面包板连接线
ULN2003驱动板
步进电机
4. 实验步骤
1. 根据原理图搭建电路。
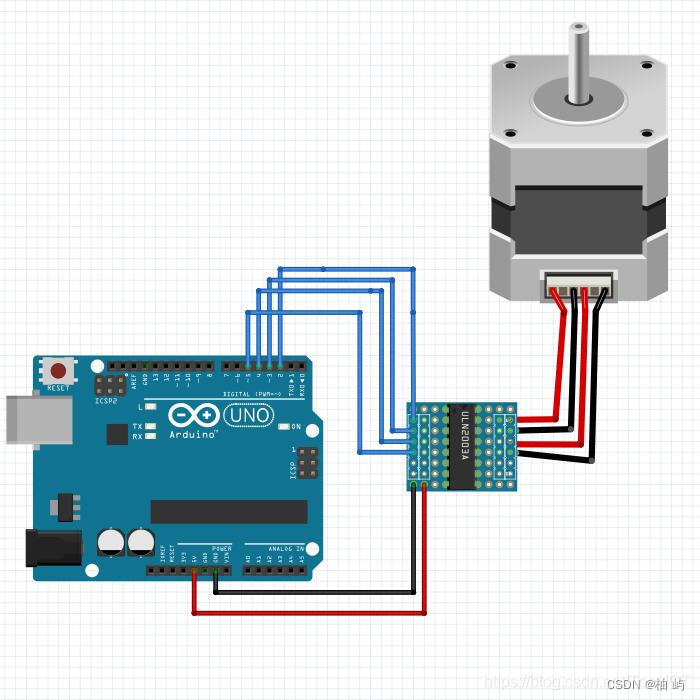
ULN2003驱动板上IN1、IN2、IN3、IN4分别连接UNO开发板的数字引脚2,3,4,5;驱动板电源输入+、-引脚分别连接UNO开发板的5V、GND。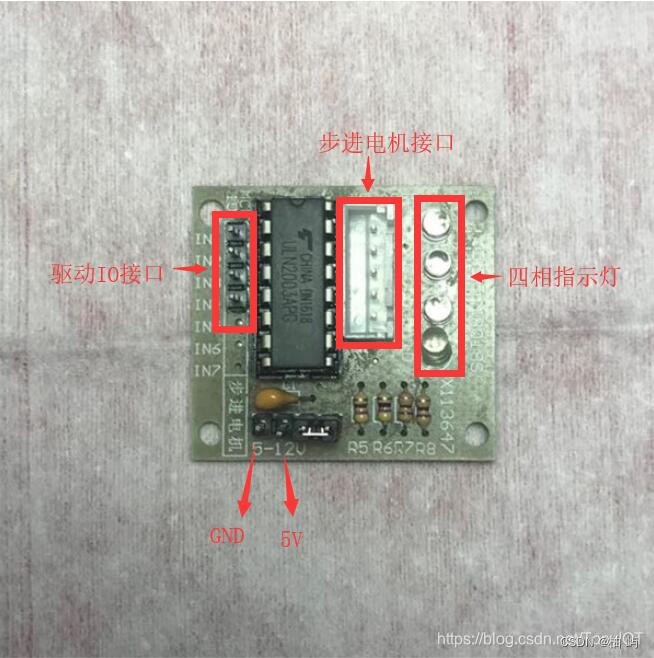 实验原理图如下图所示:
实验原理图如下图所示:
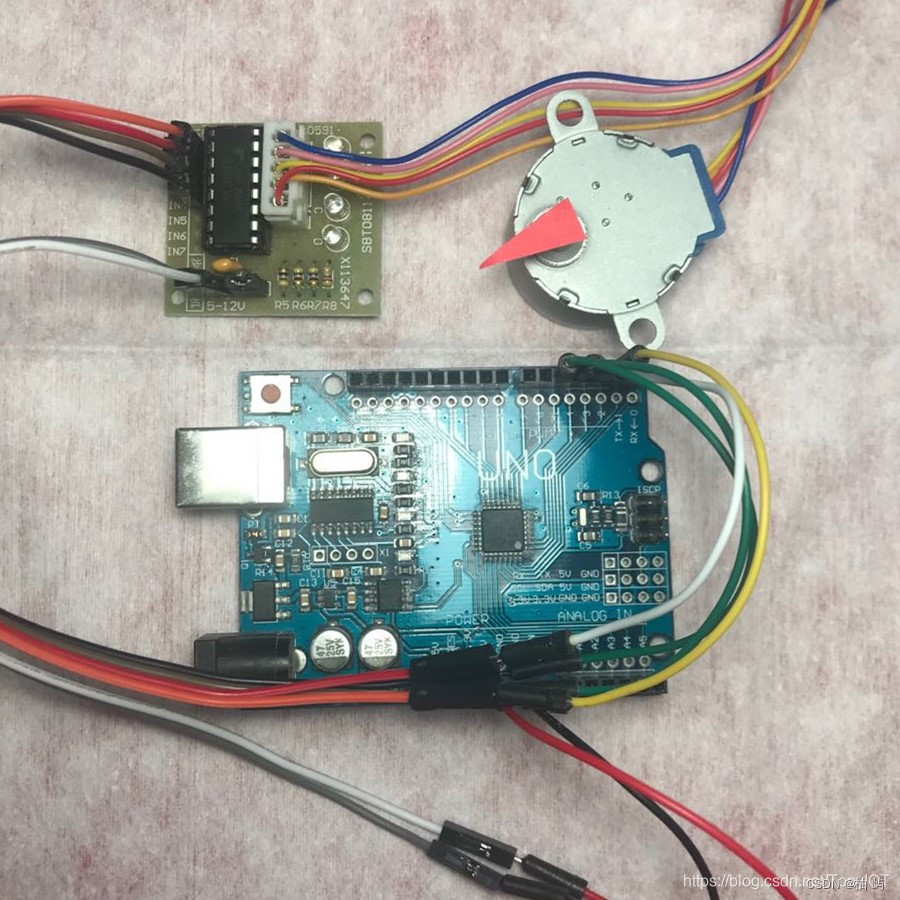
实物连接图如下图所示:
2. 新建sketch,拷贝如下代码替换自动生成的代码并进行保存。
void setup() {
// put your setup code here, to run once:
for (int i = 2; i < 6; i++) {
pinMode(i, OUTPUT);
}
}
void clockwise(int num)
{
for (int count = 0; count < num; count++)
{
for (int i = 2; i < 6; i++)
{
digitalWrite(i, HIGH);
delay(3);
digitalWrite(i, LOW);
}
}
}
void anticlockwise(int num)
{
for (int count = 0; count < num; count++)
{
for (int i = 5; i > 1; i--)
{
digitalWrite(i, HIGH);
delay(3);
digitalWrite(i, LOW);
}
}
}
void loop() {
// put your main code here, to run repeatedly:
clockwise(512);
delay(10);
anticlockwise(512);
}
3. 连接开发板,设置好对应端口号和开发板类型,进行程序下载。
5. 实验现象
步进电机顺时针、逆时针交替旋转。
6. 实验分析
程序通过ABCD四相通电顺序实现步进电机正反转控制。步进电机旋转一周,程序中循环次数为什么是512次呢?这是根据我们使用的步进电机参数计算而来的:
步进电机电压5V,步距角5.625,减速比1:64
计算A-B-C-D通电一次转动的角度5.625X2X4/64=0.703125 (2是表示1相励磁方式每步是2倍的步距角,4表示走了4步, 64指电机减速比)
转动360度循环ABCD通电的次数360/0.7031=512
Arduino学习交流群:672088578
更多内容,欢迎关注我的公众号。 微信扫一扫下方二维码即可关注:


















 1885
1885

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









