







 本文介绍了如何在STM32F103C8T6微控制器上使用PWM输入捕获技术配合HC-SR04超声波模块进行测距,详细讲解了模块工作原理和使用TIM3定时器进行高电平持续时间测量的方法,以及主函数和中断处理部分的代码示例。
本文介绍了如何在STM32F103C8T6微控制器上使用PWM输入捕获技术配合HC-SR04超声波模块进行测距,详细讲解了模块工作原理和使用TIM3定时器进行高电平持续时间测量的方法,以及主函数和中断处理部分的代码示例。
硬件平台:stm32f103c8t6
这里我就不列一些复杂的资料和文件来说明,我尽量用我觉得很好理解的口水化的语言来把这个模块解释清楚。
HC-SR04超声波测距模块是较常用的模块之一,比如可以用在避障小车上。
这里我用的是PWM输入捕获的方法来驱动此模块,在此之前我们先简单的了解一下该模块


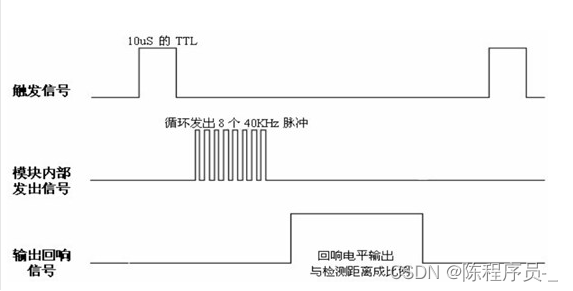
这里我们可以看出来,该模块的工作原理:
1.trig脚发送一个大于10us的高电平,该模块就会发送一个超声波
2.在发送超声波的同时,echo脚被拉为高电平
3.超声波遇到障碍物就会反弹回来,当模块接收到反弹回的超声波时,拉低echo脚
4.通过得到echo脚被拉为高电平持续的时间,将该时间通过公式转化为所测的距离
测试距离 = (高电平时间声速(340M/S)/2)= ((float)t/5
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









