






文章仅为本人学习记录,可供参考
1.通过CUBEMX配置时,需要用到一个io口进行数据传输,一个定时器实现微秒延时,一个串口打印信息,配置如下:
cubemx的基础配置不在进行介绍,不会的可以去看我前面的文章。
STM32之CUBEMX及KEIL 5基础配置_keil5 打开stm32cube-优快云博客
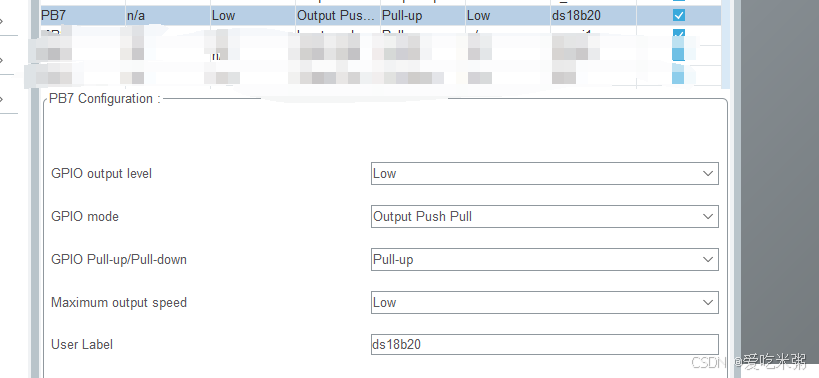
(1)使用PB7引脚做为io口,引脚可以自定义修改,后续代码会进行讲解:
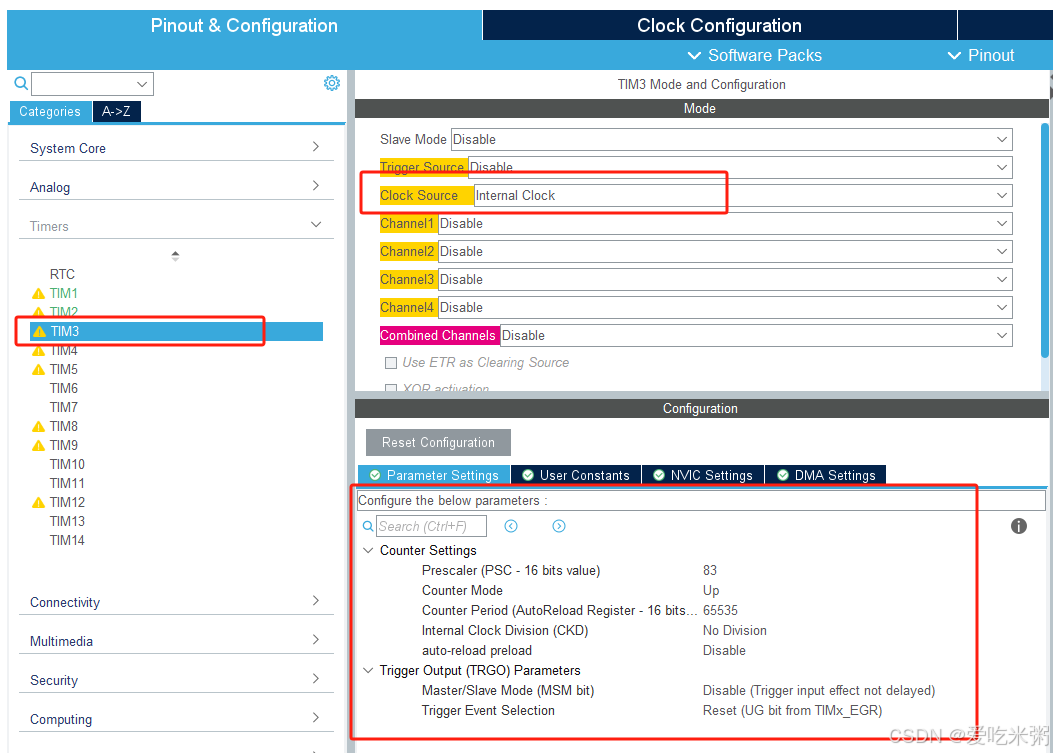
(2)使用TIM3定时器实现微秒延时,也可以使用其他定时器,只要通过修改预分频系数,让定时器频率为1MHZ即可,并且开启中断使能:

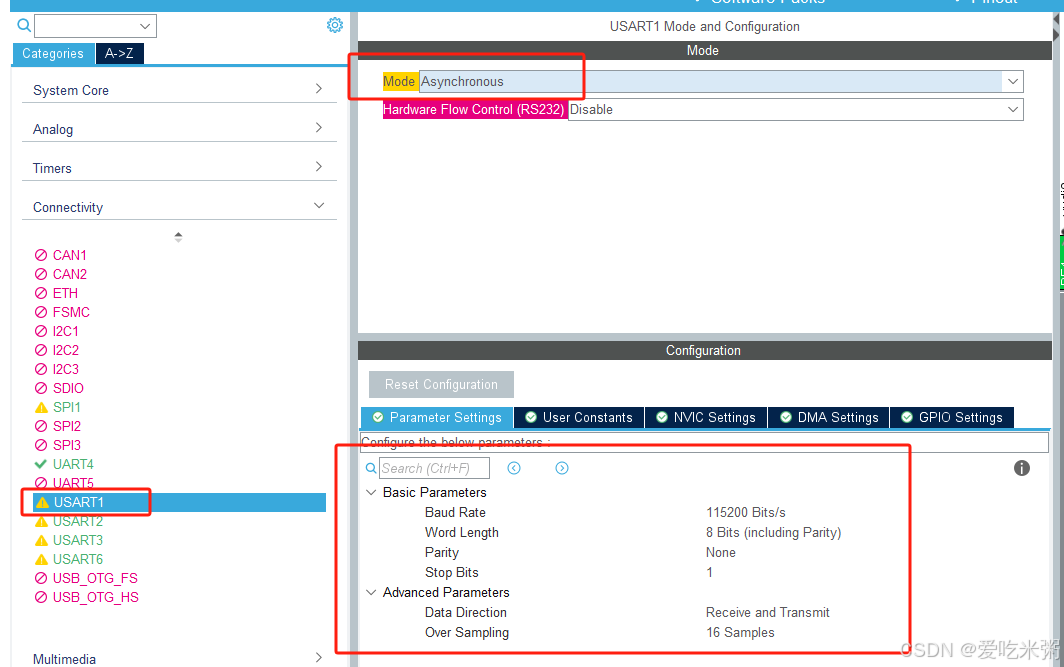
(3)串口使用串口一打印信息:
2.CUBEMX配置完成之后,在生成的keil文件中需要加入DS18B20.C及DS18B20.H文件,如下:
DS18B20.C
#include "ds18b20.h"
#include "tim.h"
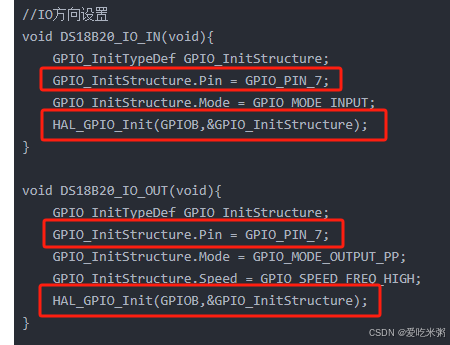
//IO方向设置
void DS18B20_IO_IN(void){
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_7;
GPIO_InitStructure.Mode = GPIO_MODE_INPUT;
HAL_GPIO_Init(GPIOB,&GPIO_InitStructure);
}
void DS18B20_IO_OUT(void){
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_7;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,&GPIO_InitStructure);
}
//复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_IO_OUT(); //SET PA0 OUTPUT
DS18B20_DQ_OUT=0; //拉低DQ
//HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,0);
delay_us(750); //拉低750us
DS18B20_DQ_OUT=1; //DQ=1
//HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,1);
delay_us(15); //15US
}
//等待DS18B20的回应
//返回1:未检测到DS18B20的存在
//返回0:存在
uint8_t DS18B20_Check(void)
{
uint8_t retry=0;
DS18B20_IO_IN();//SET PA0 INPUT
while (DS18B20_DQ_IN&&retry<200)
//while (HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)&&retry<200)
{
retry++;
delay_us(1);
};
if(retry>=200)return 1;
else retry=0;
while (!DS18B20_DQ_IN&&retry<240)
//while (!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)&&retry<240)
{
retry++;
delay_us(1);
};
if(retry>=240)return 1;
return 0;
}
//从DS18B20读取一个位
//返回值:1/0
uint8_t DS18B20_Read_Bit(void) // read one bit
{
uint8_t data;
DS18B20_IO_OUT();//SET PA0 OUTPUT
DS18B20_DQ_OUT=0;
delay_us(2);
DS18B20_DQ_OUT=1;
DS18B20_IO_IN();//SET PA0 INPUT
delay_us(12);
if(DS18B20_DQ_IN)data=1;
else data=0;
delay_us(50);
return data;
}
//从DS18B20读取一个字节
//返回值:读到的数据
uint8_t DS18B20_Read_Byte(void)
{
uint8_t i,j,dat;
dat=0;
for (i=1;i<=8;i++)
{
j=DS18B20_Read_Bit();
dat=(j<<7)|(dat>>1);
}
return dat;
}
//写一个字节到DS18B20
//dat:要写入的字节
void DS18B20_Write_Byte(uint8_t dat)
{
uint8_t j;
uint8_t testb;
DS18B20_IO_OUT();
for (j=1;j<=8;j++)
{
testb=dat&0x01;
dat=dat>>1;
if (testb)
{
DS18B20_DQ_OUT=0;
delay_us(2);
DS18B20_DQ_OUT=1;
delay_us(60);
}
else
{
DS18B20_DQ_OUT=0;
delay_us(60);
DS18B20_DQ_OUT=1;
delay_us(2);
}
}
}
//开始温度转换
void DS18B20_Start(void)// ds1820 start convert
{
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc);
DS18B20_Write_Byte(0x44);
}
//初始化DS18B20的IO口 DQ 同时检测DS的存在
//返回1:不存在
//返回0:存在
uint8_t DS18B20_Init(void)
{
DS18B20_Rst();
return DS18B20_Check();
}
//从ds18b20得到温度值
//精度:0.1C
//返回值:温度值 (-550~1250)
short DS18B20_Get_Temp(void)
{
uint8_t temp;
uint8_t TL,TH;
short tem;
DS18B20_Start ();
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc);// skip rom
DS18B20_Write_Byte(0xbe);// convert
TL=DS18B20_Read_Byte(); // LSB
TH=DS18B20_Read_Byte(); // MSB
if(TH>7)
{
TH=~TH;
TL=~TL;
temp=0;//温度为负
}else temp=1;//温度为正
tem=TH; //获得高八位
tem<<=8;
tem+=TL;//获得底八位
tem=(float)tem*0.625;//转换
if(temp)return tem; //返回温度值
else return -tem;
}
DS18B20.H
#ifndef __DS18B20_H
#define __DS18B20_H
#include "main.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIOA_ODR_Addr (GPIOA_BASE+0x14)
#define GPIOB_ODR_Addr (GPIOB_BASE+0x14)
#define GPIOC_ODR_Addr (GPIOC_BASE+0x14)
#define GPIOD_ODR_Addr (GPIOD_BASE+0x14)
#define GPIOE_ODR_Addr (GPIOE_BASE+0x14)
#define GPIOF_ODR_Addr (GPIOF_BASE+0x14)
#define GPIOG_ODR_Addr (GPIOG_BASE+0x14)
#define GPIOA_IDR_Addr (GPIOA_BASE+0x10)
#define GPIOB_IDR_Addr (GPIOB_BASE+0x10)
#define GPIOC_IDR_Addr (GPIOC_BASE+0x10)
#define GPIOD_IDR_Addr (GPIOD_BASE+0x10)
#define GPIOE_IDR_Addr (GPIOE_BASE+0x10)
#define GPIOF_IDR_Addr (GPIOF_BASE+0x10)
#define GPIOG_IDR_Addr (GPIOG_BASE+0x10)
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n)
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n)
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n)
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n)
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n)
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n)
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n)
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n)
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n)
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n)
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n)
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n)
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n)
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n)
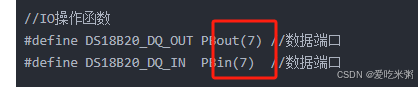
//IO操作函数
#define DS18B20_DQ_OUT PBout(7) //数据端口
#define DS18B20_DQ_IN PBin(7) //数据端口
uint8_t DS18B20_Init(void); //初始化DS18B20
short DS18B20_Get_Temp(void); //获取温度
void DS18B20_Start(void); //开始温度转换
void DS18B20_Write_Byte(uint8_t dat);//写入一个字节
uint8_t DS18B20_Read_Byte(void); //读出一个字节
uint8_t DS18B20_Read_Bit(void); //读出一个位
uint8_t DS18B20_Check(void); //检测是否存在DS18B20
void DS18B20_Rst(void); //复位DS18B20
#endif
如果要自定义更换其他io引脚,需要修改两个地方,一个是DS18B20.C文件中的io方向函数,一个是DS18B20.H中的io操作函数,修改为自己使用的引脚即可
然后在tim.c文件中加入微秒延时函数,在tim.h文件进行声明即可:
void delay_us(uint16_t us)
{
uint16_t differ=0xffff-us-5; //设定定时器计数器起始值
HAL_TIM_Base_Start(&htim3); //启动定时器
__HAL_TIM_SetCounter(&htim3,differ);
while(differ < 0xffff-5) //补偿,判断
{
differ = __HAL_TIM_GetCounter(&htim3); //查询计数器的计数值
}
HAL_TIM_Base_Stop(&htim3);
}/* USER CODE BEGIN Includes */
void delay_us(uint16_t us);
/* USER CODE END Includes */
因为需要串口打印信息,所以还需要在mian.c文件中加入串口重定向函数:
/* USER CODE BEGIN PD */
//串口重定向函数,将输出字符流重定向到UART串口
int fputc(int ch, FILE *f)
{
uint8_t temp[1] = {ch};
HAL_UART_Transmit(&huart1, temp, 1, 0xffff);
return ch;
}
/* USER CODE END PD */之后在main函数的循环外判断是否接入传感器
/* USER CODE BEGIN 2 */
while(DS18B20_Init()){
printf("DS18B20 checked failed\r\n");
HAL_Delay(500);
}
printf("DS18B20 checked success\r\n");
/* USER CODE END 2 */
在main函数的循环内检测温度
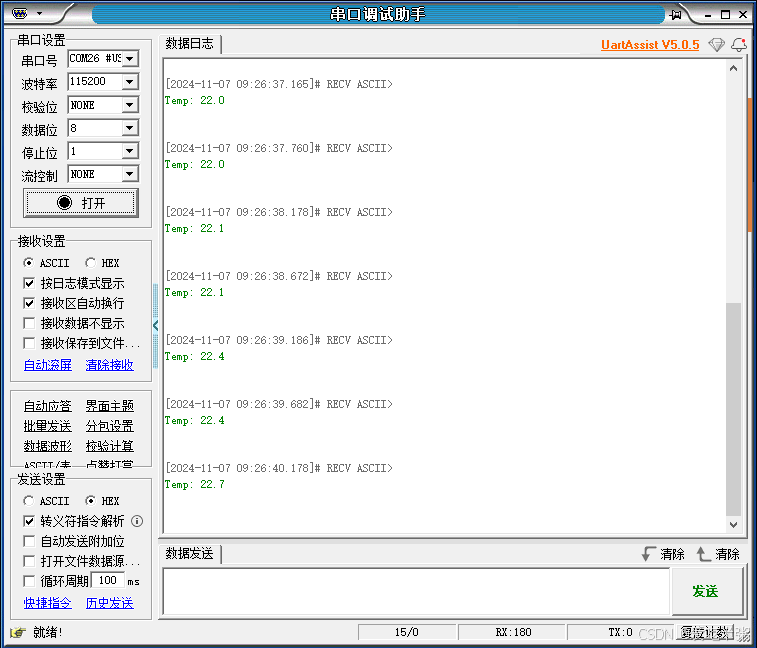
temperature = DS18B20_Get_Temp();
if(temperature < 0)
printf("现在温度是 -%d ℃\r\n",temperature/10);
else
printf("现在温度是 %d ℃\r\n",temperature/10);
HAL_Delay(500);
3.实际温度检测效果

















 1714
1714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









