







现在能在网上找到很多很多的学习资源,有免费的也有收费的,当我拿到1套比较全的学习资源之前,我并没着急去看第1节,我而是去审视这套资源是否值得学习,有时候也会去问一些学长的意见,如果可以之后,我会对这套学习资源做1个学习计划,我的学习计划主要包括规划图和学习进度表。
分享给大家这份我薅到的免费视频资料,质量还不错,大家可以跟着学习

网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
self.branch1_conv1_bn = nn.BatchNorm2d(32)
self.branch2_pool = nn.MaxPool2d(kernel_size=3,stride=1,padding=1)
self.branch2_conv1 = nn.Conv2d(in_channels=128, out_channels=32, kernel_size=1, stride=1)
self.branch2_conv1_bn = nn.BatchNorm2d(32)
self.branch3_conv1 = nn.Conv2d(in_channels=128, out_channels=24, kernel_size=1, stride=1)
self.branch3_conv1_bn = nn.BatchNorm2d(24)
self.branch3_conv2 = nn.Conv2d(in_channels=24, out_channels=32, kernel_size=3, stride=1, padding=1)
self.branch3_conv2_bn = nn.BatchNorm2d(32)
self.branch4_conv1 = nn.Conv2d(in_channels=128, out_channels=24, kernel_size=1, stride=1)
self.branch4_conv1_bn = nn.BatchNorm2d(24)
self.branch4_conv2 = nn.Conv2d(in_channels=24, out_channels=32, kernel_size=3, stride=1, padding=1)
self.branch4_conv2_bn = nn.BatchNorm2d(32)
self.branch4_conv3 = nn.Conv2d(in_channels=32, out_channels=32, kernel_size=3, stride=1, padding=1)
self.branch4_conv3_bn = nn.BatchNorm2d(32)
def forward(self, x):
x1 = self.branch1_conv1_bn(self.branch1_conv1(x))
x2 = self.branch2_conv1_bn(self.branch2_conv1(self.branch2_pool(x)))
x3 = self.branch3_conv2_bn(self.branch3_conv2(self.branch3_conv1_bn(self.branch3_conv1(x))))
x4 = self.branch4_conv3_bn(self.branch4_conv3(self.branch4_conv2_bn(self.branch4_conv2(self.branch4_conv1_bn(self.branch4_conv1(x))))))
out = torch.cat([x1, x2, x3, x4],dim=1)
return out
class FaceBoxes(nn.Module):
def init(self, num_classes, phase):
super(FaceBoxes, self).init()
self.phase = phase
self.num_classes = num_classes
self.RapidlyDigestedConvolutionalLayers = nn.Sequential(
Conv2dCReLU(in_channels=3,out_channels=24,kernel_size=7,stride=4,padding=3),
nn.MaxPool2d(kernel_size=3,stride=2,padding=1),
Conv2dCReLU(in_channels=48,out_channels=64,kernel_size=5,stride=2,padding=2),
nn.MaxPool2d(kernel_size=3, stride=2,padding=1)
)
self.MultipleScaleConvolutionalLayers = nn.Sequential(
InceptionModules(),
InceptionModules(),
InceptionModules(),
)
self.conv3_1 = nn.Conv2d(in_channels=128,out_channels=128,kernel_size=1,stride=1)
self.conv3_2 = nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, stride=2, padding=1)
self.conv4_1 = nn.Conv2d(in_channels=256, out_channels=128, kernel_size=1, stride=1)
self.conv4_2 = nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, stride=2, padding=1)
self.loc_layer1 = nn.Conv2d(in_channels=128, out_channels=21*4, kernel_size=3, stride=1, padding=1)
self.conf_layer1 = nn.Conv2d(in_channels=128, out_channels=21*num_classes, kernel_size=3, stride=1, padding=1)
self.loc_layer2 = nn.Conv2d(in_channels=256, out_channels=4, kernel_size=3, stride=1, padding=1)
self.conf_layer2 = nn.Conv2d(in_channels=256, out_channels=num_classes, kernel_size=3, stride=1, padding=1)
self.loc_layer3 = nn.Conv2d(in_channels=256, out_channels=4, kernel_size=3, stride=1, padding=1)
self.conf_layer3 = nn.Conv2d(in_channels=256, out_channels=num_classes, kernel_size=3, stride=1, padding=1)
if self.phase == ‘test’:
self.softmax = nn.Softmax(dim=-1)
elif self.phase == ‘train’:
for m in self.modules():
if isinstance(m, nn.Conv2d):
if m.bias is not None:
nn.init.xavier_normal_(m.weight.data)
nn.init.constant_(m.bias, 0)
else:
nn.init.xavier_normal_(m.weight.data)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
x = self.RapidlyDigestedConvolutionalLayers(x)
out1 = self.MultipleScaleConvolutionalLayers(x)
out2 = self.conv3_2(self.conv3_1(out1))
out3 = self.conv4_2(self.conv4_1(out2))
loc1 = self.loc_layer1(out1)
conf1 = self.conf_layer1(out1)
loc2 = self.loc_layer2(out2)
conf2 = self.conf_layer2(out2)
loc3 = self.loc_layer3(out3)
conf3 = self.conf_layer3(out3)
locs = torch.cat([loc1.permute(0, 2, 3, 1).contiguous().view(loc1.size(0), -1),
loc2.permute(0, 2, 3, 1).contiguous().view(loc2.size(0), -1),
loc3.permute(0, 2, 3, 1).contiguous().view(loc3.size(0), -1)], dim=1)
confs = torch.cat([conf1.permute(0, 2, 3, 1).contiguous().view(conf1.size(0), -1),
学好 Python 不论是就业还是做副业赚钱都不错,但要学会 Python 还是要有一个学习规划。最后大家分享一份全套的 Python 学习资料,给那些想学习 Python 的小伙伴们一点帮助!
一、Python所有方向的学习路线
Python所有方向路线就是把Python常用的技术点做整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。

二、学习软件
工欲善其事必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

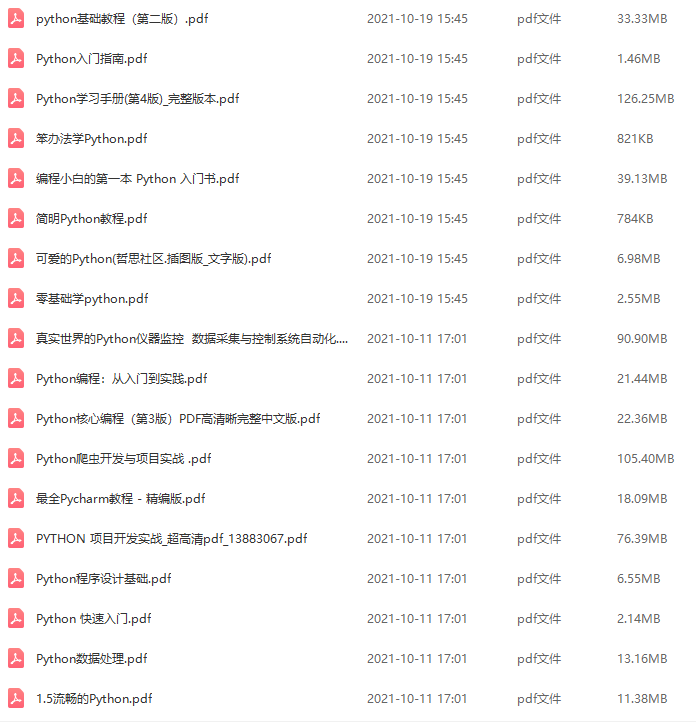
三、全套PDF电子书
书籍的好处就在于权威和体系健全,刚开始学习的时候你可以只看视频或者听某个人讲课,但等你学完之后,你觉得你掌握了,这时候建议还是得去看一下书籍,看权威技术书籍也是每个程序员必经之路。
四、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。

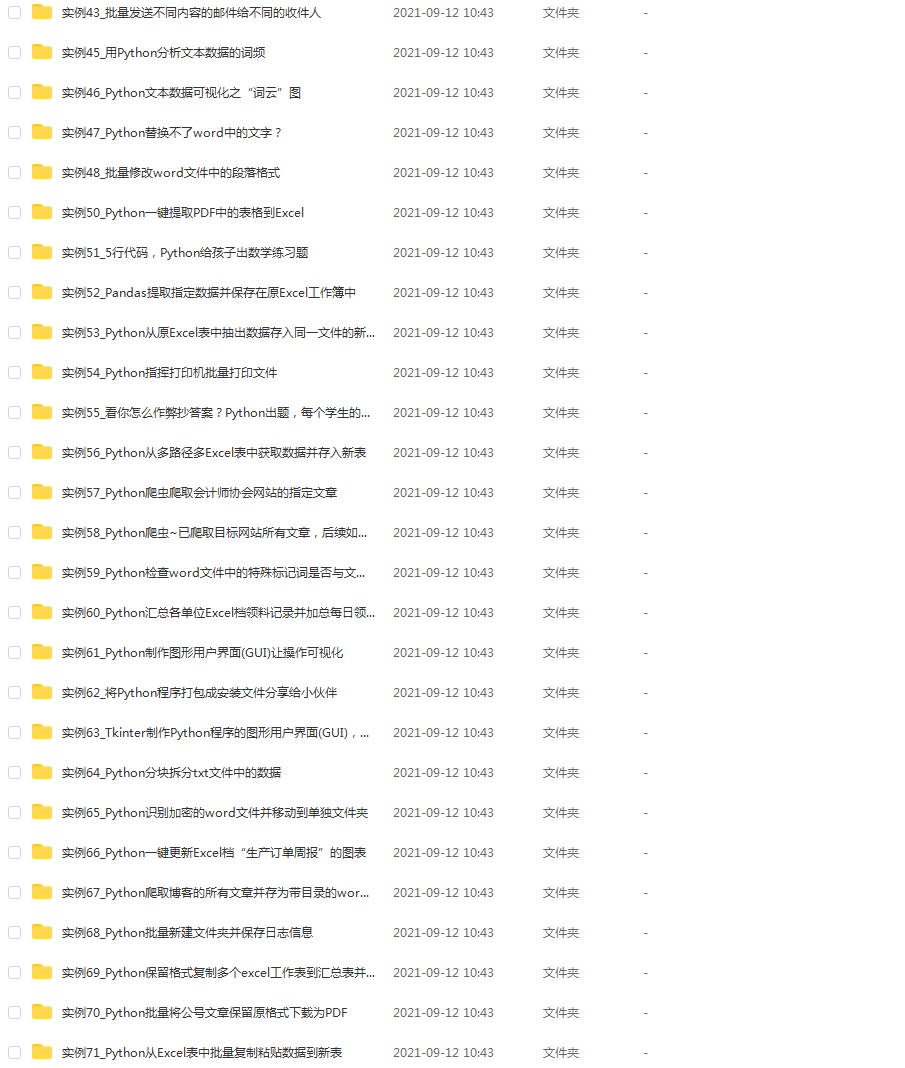
五、实战案例
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。
六、面试资料
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。


网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!

















 3329
3329

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









