









 本文深入解析BatchNormalization在深度学习中的作用机制,包括其计算公式、参数解析及在不同维度上的应用,如BatchNorm1d、BatchNorm2d和BatchNorm3d。探讨了BN如何通过减少内部协变量偏移来加速深层网络的训练,并分析了其在训练和评估阶段的统计计算方式。
本文深入解析BatchNormalization在深度学习中的作用机制,包括其计算公式、参数解析及在不同维度上的应用,如BatchNorm1d、BatchNorm2d和BatchNorm3d。探讨了BN如何通过减少内部协变量偏移来加速深层网络的训练,并分析了其在训练和评估阶段的统计计算方式。
参考相关文档:关于BN的讲解论文来自于下面的第二个
[深度学习中 Batch Normalization为什么效果好?]
[《Batch Normalization Accelerating Deep Network Training by Reducing Internal Covariate Shift》阅读笔记与实现]
[从Bayesian角度浅析Batch Normalization]
计算公式:
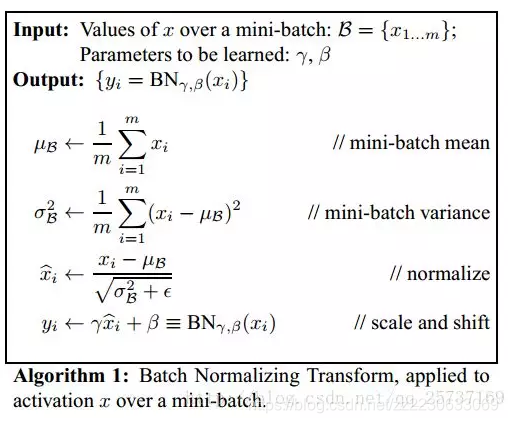
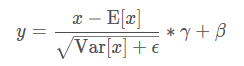
上面的均值和方差都是在每一个维度计算的,gama,beta都是可以学习的向量,size为C(channels)就是特征层的大小。
在默认情况下,在训练这个layer的期间保持运行估计(keep running estimates of its computed mean and variance)计算出来的均值和方差,而这些均值和方差在evaluation期间被用来normalization.
如果参数`track_running_stats` is set to ``False``,那么this layer then does not keep running estimates, and batch statistics are instead used during evaluation time as well.
参数momentum不是优化器里面的和传统的动量概念,该参数用于计算running_mean和running_var,当设置为None的时候是累积移动平均(即简单平均值)。数学上表示如下,其中最左边的参数是估计的统计量,最右边的参数是新观察值。
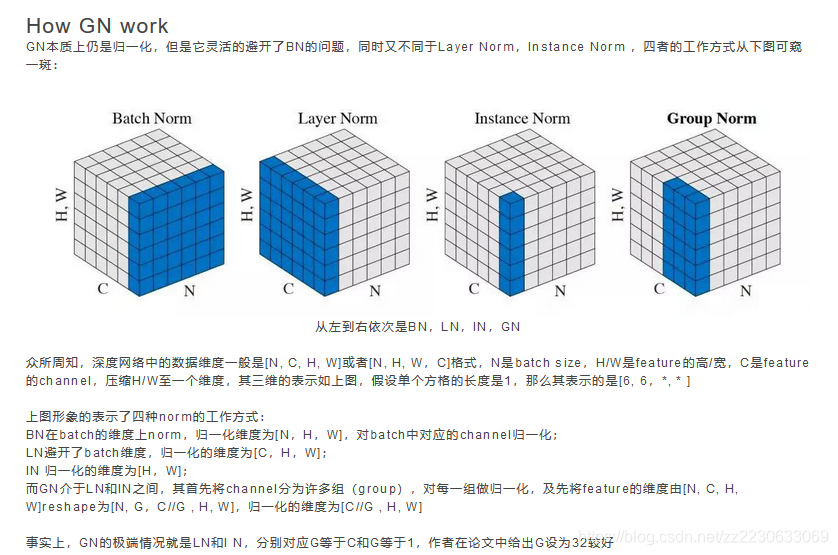
Because the Batch Normalization is done over the `C` dimension, computing statistics on `(N, H, W)` slices, it's common terminology to call this Spatial Batch Normalization.
参数eps是添加到分母的值,为了增加数值的稳定性。
参数affine是一个bool值,当为True的时候,该模块具有可学习的仿射参数weight和bias(就是上述公式里面的gama和beta),如果是False那么weight==1,bias==0,不是可学习的参数。其中weight和bias,shape都是一个向量并且维度等于特征层的数目。
@weak_module
class _BatchNorm(Module):
_version = 2
__constants__ = ['track_running_stats', 'momentum', 'eps', 'weight', 'bias',
'running_mean', 'running_var', 'num_batches_tracked']
def __init__(self, num_features, eps=1e-5, momentum=0.1, affine=True,
track_running_stats=True):
super(_BatchNorm, self).__init__()
self.num_features = num_features
self.eps = eps
self.momentum = momentum
self.affine = affine
self.track_running_stats = track_running_stats
if self.affine:
self.weight = Parameter(torch.Tensor(num_features))
self.bias = Parameter(torch.Tensor(num_features))
else:
self.register_parameter('weight', None)
self.register_parameter('bias', None)
if self.track_running_stats:
self.register_buffer('running_mean', torch.zeros(num_features))
self.register_buffer('running_var', torch.ones(num_features))
self.register_buffer('num_batches_tracked', torch.tensor(0, dtype=torch.long))
else:
self.register_parameter('running_mean', None)
self.register_parameter('running_var', None)
self.register_parameter('num_batches_tracked', None)
self.reset_parameters()
# 后面还有内容,定义其他方法
@weak_module
class BatchNorm1d(_BatchNorm):
@weak_script_method
def _check_input_dim(self, input):
if input.dim() != 2 and input.dim() != 3:
raise ValueError('expected 2D or 3D input (got {}D input)'
.format(input.dim()))
# 仅仅只有上面一个函数,下面的情况相同,都是该class的完整代码,调用了上面的父类
@weak_module
class BatchNorm2d(_BatchNorm):
@weak_script_method
def _check_input_dim(self, input):
if input.dim() != 4:
raise ValueError('expected 4D input (got {}D input)'
.format(input.dim()))
@weak_module
class BatchNorm3d(_BatchNorm):
@weak_script_method
def _check_input_dim(self, input):
if input.dim() != 5:
raise ValueError('expected 5D input (got {}D input)'
.format(input.dim()))
def __init__(self, num_features, eps=1e-5, momentum=0.1, affine=True,
track_running_stats=True):# BN的实现具体
import torch
import torch.nn as nn
m = nn.BatchNorm2d(2, affine=True) # True是默认值,weight(gamma)和bias(beta)将被使用,如果设置为False,则weight和bias都为None,公式中计算的表现为gamma为1,beta为0
input = torch.randn(2, 2, 3, 4)
output = m(input)
print("输入图片:")
print(input)
print("归一化权重(公式中的gamma):")
print(m.weight)
print("归一化偏置(公式中的beta):")
print(m.bias)
print("归一化的输出:")
print(output)
print("输出的尺度:")
print(output.size())
print("输入的特征层的第一个维度:")
print(input[:, 0, :, :])
firstDimenMean = torch.mean(input[:, 0, :, :]) # 该层的均值
firstDimenVar = torch.var(input[:, 0, :, :], False) # 该层的方差
"""注意Bessel's Correction贝塞尔校正在BN里面是不会被使用,本人经过测试,如果设置为True那么得到的结果和BN的结果不一致"""
print('eps 值', m.eps) # 这个就是公式里面的防止分母为0的eps
print(f"输入的第一个维度平均值:{firstDimenMean}")
print(f"输入的第一个维度方差:{firstDimenVar}")
myout = torch.zeros_like(output) # 用公式算的的输出初始化
myout[:, 0, :, :] = \
((input[:, 0, :, :] - firstDimenMean)/(torch.pow(firstDimenVar+m.eps, 0.5)))\
* m.weight[0] + m.bias[0]
print(f'output输出: {output[:, 0, :, :]}', f'\n myoutput输出:{myout[:, 0, :, :]}')
print('判断这两个是不是相等的(对应数值相等为1,否则为0):', myout[:, 0, :, :] == output[:, 0, :, :])
"""
可以观察数值是相等的,但是具体的数值,即小数后面的很多位之后就不相等,
所以计算的结果还是有一点小误差
"""

















 1268
1268

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









