




 本文介绍了一种基于 LogPolarFFT 的模板匹配算法实现,该算法通过 FFT 对图像进行频率域处理,结合高通滤波、极坐标变换等技术来实现旋转不变性和尺度不变性的图像匹配。
本文介绍了一种基于 LogPolarFFT 的模板匹配算法实现,该算法通过 FFT 对图像进行频率域处理,结合高通滤波、极坐标变换等技术来实现旋转不变性和尺度不变性的图像匹配。
LogPolarFFTTemplateMatcher/fftm.cpp
#include "opencv2/core.hpp"
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
//----------------------------------------------------------
// Recombinate image quaters
//----------------------------------------------------------
void Recomb(Mat &src, Mat &dst)
{
int cx = src.cols >> 1;
int cy = src.rows >> 1;
Mat tmp;
tmp.create(src.size(), src.type());
src(Rect(0, 0, cx, cy)).copyTo(tmp(Rect(cx, cy, cx, cy)));
src(Rect(cx, cy, cx, cy)).copyTo(tmp(Rect(0, 0, cx, cy)));
src(Rect(cx, 0, cx, cy)).copyTo(tmp(Rect(0, cy, cx, cy)));
src(Rect(0, cy, cx, cy)).copyTo(tmp(Rect(cx, 0, cx, cy)));
dst = tmp;
}
//----------------------------------------------------------
// 2D Forward FFT
//----------------------------------------------------------
void ForwardFFT(Mat &Src, Mat *FImg, bool do_recomb = true)
{
int M = getOptimalDFTSize(Src.rows);
int N = getOptimalDFTSize(Src.cols);
Mat padded;
copyMakeBorder(Src, padded, 0, M - Src.rows, 0, N - Src.cols, BORDER_CONSTANT, Scalar::all(0));
Mat planes[] = { Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F) };
Mat complexImg;
merge(planes, 2, complexImg);
dft(complexImg, complexImg);
split(complexImg, planes);
planes[0] = planes[0](Rect(0, 0, planes[0].cols & -2, planes[0].rows & -2));
planes[1] = planes[1](Rect(0, 0, planes[1].cols & -2, planes[1].rows & -2));
if (do_recomb)
{
Recomb(planes[0], planes[0]);
Recomb(planes[1], planes[1]);
}
planes[0] /= float(M*N);
planes[1] /= float(M*N);
FImg[0] = planes[0].clone();
FImg[1] = planes[1].clone();
}
//----------------------------------------------------------
// 2D inverse FFT
//----------------------------------------------------------
void InverseFFT(Mat *FImg, Mat &Dst, bool do_recomb = true)
{
if (do_recomb)
{
Recomb(FImg[0], FImg[0]);
Recomb(FImg[1], FImg[1]);
}
Mat complexImg;
merge(FImg, 2, complexImg);
idft(complexImg, complexImg);
split(complexImg, FImg);
Dst = FImg[0].clone();
}
//-----------------------------------------------------------------------------------------------------
//
//-----------------------------------------------------------------------------------------------------
void highpass(Size sz, Mat& dst)
{
Mat a = Mat(sz.height, 1, CV_32FC1);
Mat b = Mat(1, sz.width, CV_32FC1);
float step_y = CV_PI / sz.height;
float val = -CV_PI*0.5;
for (int i = 0; i < sz.height; ++i)
{
a.at<float>(i) = cos(val);
val += step_y;
}
val = -CV_PI*0.5;
float step_x = CV_PI / sz.width;
for (int i = 0; i < sz.width; ++i)
{
b.at<float>(i) = cos(val);
val += step_x;
}
Mat tmp = a*b;
dst = (1.0 - tmp).mul(2.0 - tmp);
}
//-----------------------------------------------------------------------------------------------------
//
//-----------------------------------------------------------------------------------------------------
float logpolar(Mat& src, Mat& dst)
{
float radii = src.cols;
float angles = src.rows;
Point2f center(src.cols / 2, src.rows / 2);
float d = norm(Vec2f(src.cols - center.x, src.rows - center.y));
float log_base = pow(10.0, log10(d) / radii);
float d_theta = CV_PI / (float)angles;
float theta = CV_PI / 2.0;
float radius = 0;
Mat map_x(src.size(), CV_32FC1);
Mat map_y(src.size(), CV_32FC1);
for (int i = 0; i < angles; ++i)
{
for (int j = 0; j < radii; ++j)
{
radius = pow(log_base, float(j));
float x = radius * sin(theta) + center.x;
float y = radius * cos(theta) + center.y;
map_x.at<float>(i, j) = x;
map_y.at<float>(i, j) = y;
}
theta += d_theta;
}
remap(src, dst, map_x, map_y, CV_INTER_LINEAR, BORDER_CONSTANT, Scalar(0, 0, 0));
return log_base;
}
//-----------------------------------------------------------------------------------------------------
// As input we need equal sized images, with the same aspect ratio,
// scale difference should not exceed 1.8 times.
//-----------------------------------------------------------------------------------------------------
RotatedRect LogPolarFFTTemplateMatch(Mat& im0, Mat& im1, double canny_threshold1, double canny_threshold2)
{
// Accept 1 or 3 channel CV_8U, CV_32F or CV_64F images.
CV_Assert((im0.type() == CV_8UC1) || (im0.type() == CV_8UC3) ||
(im0.type() == CV_32FC1) || (im0.type() == CV_32FC3) ||
(im0.type() == CV_64FC1) || (im0.type() == CV_64FC3));
CV_Assert(im0.rows == im1.rows && im0.cols == im1.cols);
CV_Assert(im0.channels() == 1 || im0.channels() == 3 || im0.channels() == 4);
CV_Assert(im1.channels() == 1 || im1.channels() == 3 || im1.channels() == 4);
Mat im0_tmp = im0.clone();
Mat im1_tmp = im1.clone();
if (im0.channels() == 3)
{
cvtColor(im0, im0, cv::COLOR_BGR2GRAY);
}
if (im0.channels() == 4)
{
cvtColor(im0, im0, cv::COLOR_BGRA2GRAY);
}
if (im1.channels() == 3)
{
cvtColor(im1, im1, cv::COLOR_BGR2GRAY);
}
if (im1.channels() == 4)
{
cvtColor(im1, im1, cv::COLOR_BGRA2GRAY);
}
if (im0.type() == CV_32FC1)
{
im0.convertTo(im0, CV_8UC1, 255.0);
}
if (im1.type() == CV_32FC1)
{
im1.convertTo(im1, CV_8UC1, 255.0);
}
if (im0.type() == CV_64FC1)
{
im0.convertTo(im0, CV_8UC1, 255.0);
}
if (im1.type() == CV_64FC1)
{
im1.convertTo(im1, CV_8UC1, 255.0);
}
Canny(im0, im0, canny_threshold1, canny_threshold2); // you can change this
Canny(im1, im1, canny_threshold1, canny_threshold2);
// Ensure both images are of CV_32FC1 type
im0.convertTo(im0, CV_32FC1, 1.0 / 255.0);
im1.convertTo(im1, CV_32FC1, 1.0 / 255.0);
Mat F0[2], F1[2];
Mat f0, f1;
ForwardFFT(im0, F0);
ForwardFFT(im1, F1);
magnitude(F0[0], F0[1], f0);
magnitude(F1[0], F1[1], f1);
// Create filter
Mat h;
highpass(f0.size(), h);
// Apply it in freq domain
f0 = f0.mul(h);
f1 = f1.mul(h);
float log_base;
Mat f0lp, f1lp;
log_base = logpolar(f0, f0lp);
log_base = logpolar(f1, f1lp);
// Find rotation and scale
Point2d rotation_and_scale = cv::phaseCorrelate(f1lp, f0lp);
float angle = 180.0 * rotation_and_scale.y / f0lp.rows;
float scale = pow(log_base, rotation_and_scale.x);
// --------------
if (scale > 1.8)
{
rotation_and_scale = cv::phaseCorrelate(f1lp, f0lp);
angle = -180.0 * rotation_and_scale.y / f0lp.rows;
scale = 1.0 / pow(log_base, rotation_and_scale.x);
if (scale > 1.8)
{
cout << "Images are not compatible. Scale change > 1.8" << endl;
return RotatedRect();
}
}
// --------------
if (angle < -90.0)
{
angle += 180.0;
}
else if (angle > 90.0)
{
angle -= 180.0;
}
// Now rotate and scale fragment back, then find translation
Mat rot_mat = getRotationMatrix2D(Point(im1.cols / 2, im1.rows / 2), angle, 1.0 / scale);
// rotate and scale
Mat im1_rs;
warpAffine(im1, im1_rs, rot_mat, im1.size());
// find translation
Point2d tr = cv::phaseCorrelate(im1_rs, im0);
// compute rotated rectangle parameters
RotatedRect rr;
rr.center = tr + Point2d(im0.cols / 2, im0.rows / 2);
rr.angle = -angle;
rr.size.width = im1.cols / scale;
rr.size.height = im1.rows / scale;
im0 = im0_tmp.clone();
im1 = im1_tmp.clone();
return rr;
}LogPolarFFTTemplateMatcher/fftm.hpp
#ifndef _OPENCV_fftm_HPP_
#define _OPENCV_fftm_HPP_
#ifdef __cplusplus
#include "opencv2/core.hpp"
#include "opencv2/opencv.hpp"
//-----------------------------------------------------------------------------------------------------
// As input we need equal sized images, with the same aspect ratio,
// scale difference should not exceed 1.8 times.
//-----------------------------------------------------------------------------------------------------
cv::RotatedRect LogPolarFFTTemplateMatch(cv::Mat& im0, cv::Mat& im1, double canny_threshold1=200, double canny_threshold2=100);
#endif
#endifLogPolarFFTTemplateMatcher/test.cpp
#include "fftm.hpp"
#include "gtest/gtest.h"
using namespace std;
using namespace cv;
//----------------------------------------------
// Check if rotated box contained in rectangular region
//----------------------------------------------
bool boxInRange(cv::Rect r, cv::RotatedRect& rr)
{
Point2f rect_points[4];
rr.points(rect_points);
bool result = true;
for (int i = 0; i < 4; ++i)
{
if (!r.contains(rect_points[i]))
{
result = false;
break;
}
}
return result;
}
//-----------------------------------------------------------------------------------------------------
//
//-----------------------------------------------------------------------------------------------------
void generateRotRectROI(Mat& img, RotatedRect& rect)
{
if (img.empty())
{
cout << "Empty image in generateRotRectROI. " << endl;
rect = RotatedRect();
return;
}
int w = img.cols;
int h = img.rows;
Rect roi(0, 0, w, h);
RNG rng(cv::getTickCount());
while (1)
{
int x = rng.uniform(w/2-w/10, w/2+w/10);
int y = rng.uniform(h/2-h/10, h/2+h/10);
float scale= rng.uniform(0.85f, 1.0f);
int wr = float(w)*scale;
int hr = float(h)*scale;
float ang= rng.uniform(-5.0, 5.0);
rect = cv::RotatedRect(Point2f(x, y), Size(wr, hr), ang);
if (boxInRange(roi, rect))
{
break;
}
}
}
//----------------------------------------------------------
//
//----------------------------------------------------------
void getQuadrangleSubPix_8u32f_CnR(const uchar* src, size_t src_step, Size src_size,
float* dst, size_t dst_step, Size win_size,
const double *matrix, int cn)
{
int x, y, k;
double A11 = matrix[0], A12 = matrix[1], A13 = matrix[2];
double A21 = matrix[3], A22 = matrix[4], A23 = matrix[5];
src_step /= sizeof(src[0]);
dst_step /= sizeof(dst[0]);
for (y = 0; y < win_size.height; y++, dst += dst_step)
{
double xs = A12*y + A13;
double ys = A22*y + A23;
double xe = A11*(win_size.width - 1) + A12*y + A13;
double ye = A21*(win_size.width - 1) + A22*y + A23;
if ((unsigned)(cvFloor(xs) - 1) < (unsigned)(src_size.width - 3) &&
(unsigned)(cvFloor(ys) - 1) < (unsigned)(src_size.height - 3) &&
(unsigned)(cvFloor(xe) - 1) < (unsigned)(src_size.width - 3) &&
(unsigned)(cvFloor(ye) - 1) < (unsigned)(src_size.height - 3))
{
for (x = 0; x < win_size.width; x++)
{
int ixs = cvFloor(xs);
int iys = cvFloor(ys);
const uchar *ptr = src + src_step*iys;
float a = (float)(xs - ixs), b = (float)(ys - iys), a1 = 1.f - a, b1 = 1.f - b;
float w00 = a1*b1, w01 = a*b1, w10 = a1*b, w11 = a*b;
xs += A11;
ys += A21;
if (cn == 1)
{
ptr += ixs;
dst[x] = ptr[0] * w00 + ptr[1] * w01 + ptr[src_step] * w10 + ptr[src_step + 1] * w11;
}
else if (cn == 3)
{
ptr += ixs * 3;
float t0 = ptr[0] * w00 + ptr[3] * w01 + ptr[src_step] * w10 + ptr[src_step + 3] * w11;
float t1 = ptr[1] * w00 + ptr[4] * w01 + ptr[src_step + 1] * w10 + ptr[src_step + 4] * w11;
float t2 = ptr[2] * w00 + ptr[5] * w01 + ptr[src_step + 2] * w10 + ptr[src_step + 5] * w11;
dst[x * 3] = t0;
dst[x * 3 + 1] = t1;
dst[x * 3 + 2] = t2;
}
else
{
ptr += ixs*cn;
for (k = 0; k < cn; k++)
dst[x*cn + k] = ptr[k] * w00 + ptr[k + cn] * w01 +
ptr[src_step + k] * w10 + ptr[src_step + k + cn] * w11;
}
}
}
else
{
for (x = 0; x < win_size.width; x++)
{
int ixs = cvFloor(xs), iys = cvFloor(ys);
float a = (float)(xs - ixs), b = (float)(ys - iys), a1 = 1.f - a, b1 = 1.f - b;
float w00 = a1*b1, w01 = a*b1, w10 = a1*b, w11 = a*b;
const uchar *ptr0, *ptr1;
xs += A11; ys += A21;
if ((unsigned)iys < (unsigned)(src_size.height - 1))
ptr0 = src + src_step*iys, ptr1 = ptr0 + src_step;
else
ptr0 = ptr1 = src + (iys < 0 ? 0 : src_size.height - 1)*src_step;
if ((unsigned)ixs < (unsigned)(src_size.width - 1))
{
ptr0 += ixs*cn; ptr1 += ixs*cn;
for (k = 0; k < cn; k++)
dst[x*cn + k] = ptr0[k] * w00 + ptr0[k + cn] * w01 + ptr1[k] * w10 + ptr1[k + cn] * w11;
}
else
{
ixs = ixs < 0 ? 0 : src_size.width - 1;
ptr0 += ixs*cn; ptr1 += ixs*cn;
for (k = 0; k < cn; k++)
dst[x*cn + k] = ptr0[k] * b1 + ptr1[k] * b;
}
}
}
}
}
//----------------------------------------------------------
//
//----------------------------------------------------------
void myGetQuadrangleSubPix(const Mat& src, Mat& dst, Mat& m)
{
CV_Assert(src.channels() == dst.channels());
cv::Size win_size = dst.size();
double matrix[6];
cv::Mat M(2, 3, CV_64F, matrix);
m.convertTo(M, CV_64F);
double dx = (win_size.width - 1)*0.5;
double dy = (win_size.height - 1)*0.5;
matrix[2] -= matrix[0] * dx + matrix[1] * dy;
matrix[5] -= matrix[3] * dx + matrix[4] * dy;
if (src.depth() == CV_8U && dst.depth() == CV_32F)
getQuadrangleSubPix_8u32f_CnR(src.data, src.step, src.size(),
(float*)dst.data, dst.step, dst.size(),
matrix, src.channels());
else
{
CV_Assert(src.depth() == dst.depth());
cv::warpAffine(src, dst, M, dst.size(),
cv::INTER_LINEAR + cv::WARP_INVERSE_MAP,
cv::BORDER_REPLICATE);
}
}
//----------------------------------------------------------
//
//----------------------------------------------------------
void getRotRectImg(cv::RotatedRect rr, Mat &img, Mat& dst)
{
Mat m(2, 3, CV_64FC1);
float ang = rr.angle*CV_PI / 180.0;
m.at<double>(0, 0) = cos(ang);
m.at<double>(1, 0) = sin(ang);
m.at<double>(0, 1) = -sin(ang);
m.at<double>(1, 1) = cos(ang);
m.at<double>(0, 2) = rr.center.x;
m.at<double>(1, 2) = rr.center.y;
myGetQuadrangleSubPix(img, dst, m);
}
//-----------------------------------------------------------------------------------------------------
//
//-----------------------------------------------------------------------------------------------------
float rrDist(RotatedRect r1, RotatedRect r2)
{
return norm(r1.center - r2.center) + fabs(r1.size.width-r2.size.width) + fabs(r1.size.height - r2.size.height) + fabs(r1.angle-r2.angle);
}
//-----------------------------------------------------------------------------------------------------
//
//-----------------------------------------------------------------------------------------------------
TEST(imgProc_LogPolarFFTTemplateMatch, resultTest)
{
//cvtest::TS::ptr()->get_data_path() + "denoising/lena_orig.png";
Mat test_img1 = imread("lena_orig.png", 0);
EXPECT_EQ(false, test_img1.empty());
if (test_img1.empty())
{
cout << "Error loading imput image. " << endl;
return;
}
Mat test_img2;
RotatedRect rect;
generateRotRectROI(test_img1, rect);
EXPECT_NE(0, rect.size.area());
test_img2 = Mat(rect.size, test_img1.type());
getRotRectImg(rect, test_img1, test_img2);
resize(test_img2, test_img2, test_img1.size());
RotatedRect rr = LogPolarFFTTemplateMatch(test_img1, test_img2, 200,100);
EXPECT_NE(0, rr.size.area());
Point2f rect_points[4];
rr.points(rect_points);
for (int j = 0; j < 4; j++)
{
line(test_img1, rect_points[j], rect_points[(j + 1) % 4], Scalar(1, 0, 0), 2, CV_AA);
}
float dist = rrDist(rr, rect);
EXPECT_LE(dist, 8);
}
//----------------------------------------------------------
//
//----------------------------------------------------------
int main(int argc, char* argv[])
{
testing::InitGoogleTest(&argc,argv);
return RUN_ALL_TESTS();
}LogPolarFFTTemplateMatcher/example.cpp
#include "fftm.hpp"
using namespace std;
using namespace cv;
//-----------------------------------------------------------------------------------------------------
//
//-----------------------------------------------------------------------------------------------------
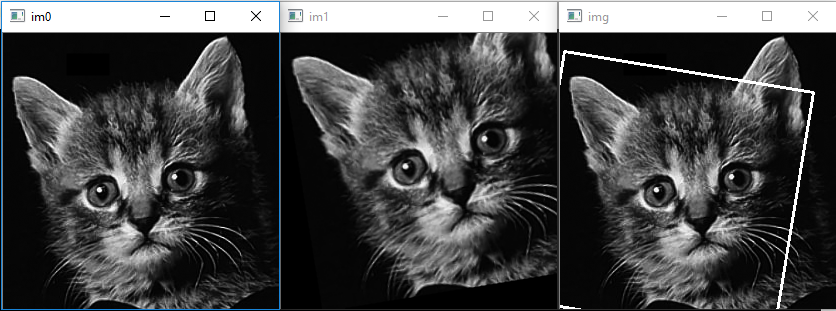
int main(int argc, unsigned int** argv)
{
Mat im0 = imread("cat.png", 1);
Mat im1 = imread("cat_part.png", 1);
imshow("im1", im1);
imshow("im0", im0);
// As input we need equal sized images, with the same aspect ratio,
// scale difference should not exceed 1.8 times.
RotatedRect rr = LogPolarFFTTemplateMatch(im0, im1,200,100);
// Plot rotated rectangle, to check result correctness
Point2f rect_points[4];
rr.points(rect_points);
for (int j = 0; j < 4; j++)
{
line(im0, rect_points[j], rect_points[(j + 1) % 4], Scalar(255, 0, 0), 2, CV_AA);
}
imshow("result", im0);
waitKey();
}

















 3709
3709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









