




Linux-进程的管理与调度3(基于6.1内核)---进程ID
一、进程ID概述
1.1、进程ID类型
要想了解内核如何来组织和管理进程ID,先要知道进程ID的类型:
内核中进程ID的类型:pid_type用来描述,它被定义:include/linux/pid.h
1.PID 内核唯一区分每个进程的标识。
enum pid_type
{
PIDTYPE_PID,
PIDTYPE_TGID,
PIDTYPE_PGID,
PIDTYPE_SID,
PIDTYPE_MAX,
};
pid是 Linux 中在其命名空间中唯一标识进程而分配给它的一个号码,称做进程ID号,简称PID。在使用 fork 或 clone 系统调用时产生的进程均会由内核分配一个新的唯一的PID值。
这个pid用于内核唯一的区分每个进程:它并不是我们用户空间通过getpid( )所获取到的那个进程号。
2.TGID 线程组(轻量级进程组)的ID标识。
在一个进程中,如果以CLONE_THREAD标志来调用clone建立的进程就是该进程的一个线程(即轻量级进程,Linux其实没有严格的进程概念),它们处于一个线程组,该线程组的所有线程的ID叫做TGID。处于相同的线程组中的所有进程都有相同的TGID,但是由于他们是不同的进程,因此其pid各不相同;线程组组长(也叫主线程)的TGID与其PID相同;一个进程没有使用线程,则其TGID与PID也相同。
3.PGID
另外,独立的进程可以组成进程组(使用setpgrp系统调用),进程组可以简化向所有组内进程发送信号的操作。例如用管道连接的进程处在同一进程组内。进程组ID叫做PGID,进程组内的所有进程都有相同的PGID,等于该组组长的PID。
4.SID
几个进程组可以合并成一个会话组(使用setsid系统调用),可以用于终端程序设计。会话组中所有进程都有相同的SID,保存在task_struct的session成员中。
1.2、PID命名空间
1.命名空间
命名空间是为操作系统层面的虚拟化机制提供支撑,目前实现的有六种不同的命名空间,分别为mount命名空间、UTS命名空间、IPC命名空间、用户命名空间、PID命名空间、网络命名空间。命名空间简单来说提供的是对全局资源的一种抽象,将资源放到不同的容器中(不同的命名空间),各容器彼此隔离。
命名空间有的还有层次关系,如PID命名空间:
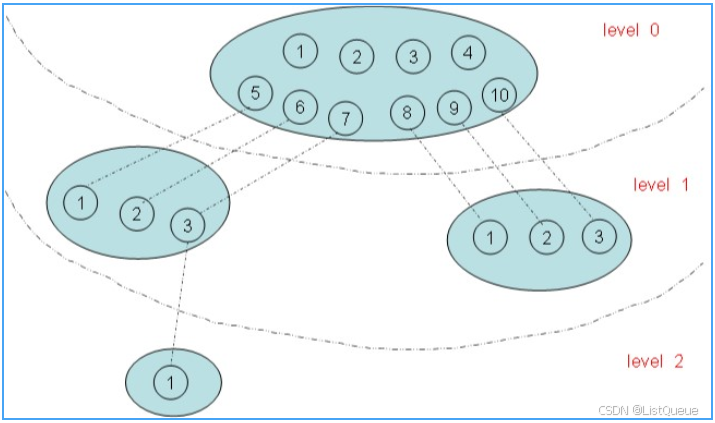
在上图有四个命名空间,一个父命名空间衍生了两个子命名空间,其中的一个子命名空间又衍生了一个子命名空间。以PID命名空间为例,由于各个命名空间彼此隔离,所以每个命名空间都可以有 PID 号为 1 的进程;但又由于命名空间的层次性,父命名空间是知道子命名空间的存在,因此子命名空间要映射到父命名空间中去,因此上图中 level 1 中两个子命名空间的六个进程分别映射到其父命名空间的PID 号5~10。
2、局部和全局ID
命名空间增加了PID管理的复杂性。
回想一下,PID命名空间按层次组织。在建立一个新的命名空间时,该命名空间中的所有PID对父命名空间都是可见的,但子命名空间无法看到父命名空间的PID。但这意味着某些进程具有多个PID,凡可以看到该进程的命名空间,都会为其分配一个PID。 这必须反映在数据结构中。我们必须区分局部ID和全局ID
全局PID和TGID直接保存task_struct,分别是task_struct的pid和tgid成员:
-
全局ID 在内核本身和初始命名空间中唯一的ID,在系统启动期间开始的 init 进程即属于该初始命名空间。系统中每个进程都对应了该命名空间的一个PID,叫全局ID,保证在整个系统中唯一。
-
局部ID 对于属于某个特定的命名空间,它在其命名空间内分配的ID为局部ID,该ID也可以出现在其他的命名空间中。
include/linux/sched.h
struct task_struct {
#ifdef CONFIG_THREAD_INFO_IN_TASK
/*
* For reasons of header soup (see current_thread_info()), this
* must be the first element of task_struct.
*/
struct thread_info thread_info;
#endif
...
pid_t pid;
pid_t tgid;
...
}
两项都是pid_t类型,该类型定义为__kernel_pid_t,后者由各个体系结构分别定义。通常定义为int,即可以同时使用232个不同的ID。
在 Linux 6.1 内核版本中,session 和 process group ID 仍然存储在 task_struct 中的 signal 结构体里,分别通过 __session 和 __pgrp 字段进行访问。修改这些值的操作由 set_task_session() 和 set_task_pgrp() 辅助函数完成。在进程创建和管理过程中,内核会根据需要修改这些字段,例如通过调用 setsid() 或 setpgid() 等系统调用。
除了这两个字段之外,内核还需要找一个办法来管理所有命名空间内部的局部量,以及其他ID(如TID和SID)。这需要几个相互连接的数据结构,以及许多辅助函数,并将在下文讨论。
一个小型的子系统称之为PID分配器(pid allocator)用于加速新ID的分配。此外,内核需要提供辅助函数,以实现通过ID及其类型查找进程的task_struct的功能,以及将ID的内核表示形式和用户空间可见的数值进行转换的功能。
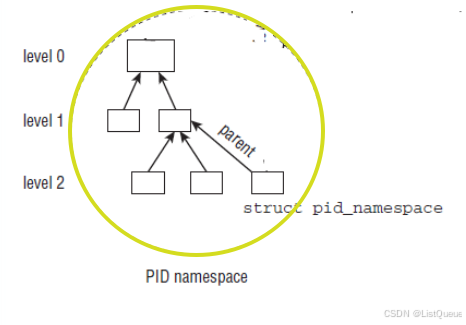
3、命名空间PID_NAMESPACE
include/linux/pid_namespace.h命名空间的结构如下
struct pid_namespace {
struct idr idr;
struct rcu_head rcu;
unsigned int pid_allocated;
struct task_struct *child_reaper;
struct kmem_cache *pid_cachep;
unsigned int level;
struct pid_namespace *parent;
#ifdef CONFIG_BSD_PROCESS_ACCT
struct fs_pin *bacct;
#endif
struct user_namespace *user_ns;
struct ucounts *ucounts;
int reboot; /* group exit code if this pidns was rebooted */
struct ns_common ns;
#if defined(CONFIG_SYSCTL) && defined(CONFIG_MEMFD_CREATE)
int memfd_noexec_scope;
#endif
} __randomize_layout;
重点关注:其中的child_reaper,level和parent这三个字段
| 字段 | 描述 |
|---|---|
| kref | 表示指向pid_namespace的个数 |
| pidmap | pidmap结构体表示分配pid的位图。当需要分配一个新的pid时只需查找位图,找到bit为0的位置并置1,然后更新统计数据域(nr_free) |
| last_pid | 用于pidmap的分配。指向最后一个分配的pid的位置。(不是特别确定) |
| child_reaper | 指向的是当前命名空间的init进程,每个命名空间都有一个作用相当于全局init进程的进程 |
| pid_cachep | 域指向分配pid的slab的地址。 |
| level | 代表当前命名空间的等级,初始命名空间的level为0,它的子命名空间level为1,依次递增,而且子命名空间对父命名空间是可见的。从给定的level设置,内核即可推断进程会关联到多少个ID。 |
| parent | 指向父命名空间的指针 |
实际上PID分配器也需要依靠该结构的某些部分来连续生成唯一ID,每个PID命名空间都具有一个进程,其发挥的作用相当于全局的init进程。init的一个目的是对孤儿进程调用wait4,命名空间局部的init变体也必须完成该工作。
二、pid结构描述
2.1、pid与upid
PID的管理围绕两个数据结构展开:include/linux/pid.h
-
内核对PID的内部表示struct upid。
-
特定的命名空间中可见的信息struct pid。
struct upid {
int nr;
struct pid_namespace *ns;
};
struct pid
{
refcount_t count;
unsigned int level;
spinlock_t lock;
/* lists of tasks that use this pid */
struct hlist_head tasks[PIDTYPE_MAX];
struct hlist_head inodes;
/* wait queue for pidfd notifications */
wait_queue_head_t wait_pidfd;
struct rcu_head rcu;
struct upid numbers[];
};
| 字段 | 描述 |
|---|---|
| nr | 表示ID具体的值 |
| ns | 指向命名空间的指针 |
| pid_chain | 指向PID哈希列表的指针,用于关联对于的PID |
| 字段 | 描述 |
|---|---|
| count | 是指使用该PID的task的数目; |
| level | 表示可以看到该PID的命名空间的数目,也就是包含该进程的命名空间的深度 |
| tasks[PIDTYPE_MAX] | 是一个数组,每个数组项都是一个散列表头,分别对应以下三种类型 |
| numbers[1] | 一个upid的实例数组,每个数组项代表一个命名空间,用来表示一个PID可以属于不同的命名空间,该元素放在末尾,可以向数组添加附加的项。 |
tasks是一个数组,每个数组项都是一个散列表头,对应于一个ID类型,PIDTYPE_PID, PIDTYPE_PGID, PIDTYPE_SID( PIDTYPE_MAX表示ID类型的数目)这样做是必要的,因为一个ID可能用于几个进程。所有共享同一给定ID的task_struct实例,都通过该列表连接起来。
这个枚举常量PIDTYPE_MAX,正好是pid_type类型的数目,这里linux内核使用了一个小技巧来由编译器来自动生成id类型的数目。
此外,还有两个结构我们需要说明,就是pidmap(需要分配一个新的pid时查找可使用pid的位图)和pid_link(pid的哈希表存储结构)。
而在kernel 6.1版本:pidmap 和 pidlink 被以下机制替代:
a. struct pid_namespace 的重构
在较新的内核版本中,PID 的映射和管理机制经过了重构。新的实现通常将 PID 的分配、查找、以及管理移到更高效的数据结构中,通常是通过哈希表或更优化的位图来实现。PID 命名空间 (pid_namespace) 的实现被简化,并且不再直接依赖于显式的 pidmap 结构体。
在 6.x 版本的内核中,PID 映射与 PID 查找主要通过以下结构体来处理:
struct pid_namespace:仍然包含 PID 命名空间的基本信息,但不再显式使用pidmap和pidlink。struct pid:用来表示一个进程的 PID,包括其在命名空间中的映射。
b. pidmap 的替代
在较新版本中,PID 映射的管理被抽象成了更多基于哈希表和数组的机制。在 6.1 中,PID 分配和查找的过程更多地依赖于更简洁、更高效的数据结构,如 位图 和 哈希表。这些数据结构被封装在 pid_namespace 中,且在内核实现中隐藏得较为深层。
- 内核使用
pidmap类似的功能,但实现更为隐蔽,通常通过类似 位图 (bitmap) 或 链表 来管理。 - 新的
pid_hash数组替代了原先通过pidlink实现的进程链表,用于优化进程的查找速度。
c. pidlink 的替代
PID 链接(pidlink)的功能也经过了简化或替代。在新版内核中,进程之间的关系(例如父子进程关系)不再依赖于显式的 pidlink 结构,而是通过更加灵活的进程管理系统来维护。这些关系通过 task_struct 结构体中的字段(如 parent)和其他内核内部机制来处理。
例如:
task_struct中的parent字段用于维护父进程指针,子进程则通过children链接。- 对于 PID 的管理,进程和命名空间之间的映射关系通过
pid_namespace中的pid_hash或类似结构来实现。
struct {
__uint(type, BPF_MAP_TYPE_ARRAY);
__uint(max_entries, 1);
__type(key, __u32);
__type(value, __u32);
} pidmap SEC(".maps");
2.2、task_struct中进程ID相关数据结构
1、 task_struct中的描述符信息
struct task_struct
{
...
pid_t pid;
pid_t tgid;
struct task_struct *group_leader;
struct pid_link pids[PIDTYPE_MAX];
struct nsproxy *nsproxy;
...
};
| 字段 | 描述 |
|---|---|
| pid | 指该进程的进程描述符。在fork函数中对其进行赋值的 |
| tgid | 指该进程的线程描述符。在linux内核中对线程并没有做特殊的处理,还是由task_struct来管理。所以从内核的角度看, 用户态的线程本质上还是一个进程。对于同一个进程(用户态角度)中不同的线程其tgid是相同的,但是pid各不相同。 主线程即group_leader(主线程会创建其他所有的子线程)。如果是单线程进程(用户态角度),它的pid等于tgid。 |
| group_leader | 除了在多线程的模式下指向主线程,还有一个用处, 当一些进程组成一个群组时(PIDTYPE_PGID), 该域指向该群组的leader |
| nsproxy | 指针指向namespace相关的域,通过nsproxy域可以知道该task_struct属于哪个pid_namespace |
对于用户态程序来说,调用getpid()函数其实返回的是tgid,因此线程组中的进程id应该是是一致的,但是他们pid不一致,这也是内核区分他们的标识。
| 第一步:多个task_struct可以共用一个PID |
| 第二步:一个PID可以属于不同的命名空间 |
| 第三步:当需要分配一个新的pid时候,只需要查找pidmap位图 |
Linux下进程命名空间和进程的关系结构如下:
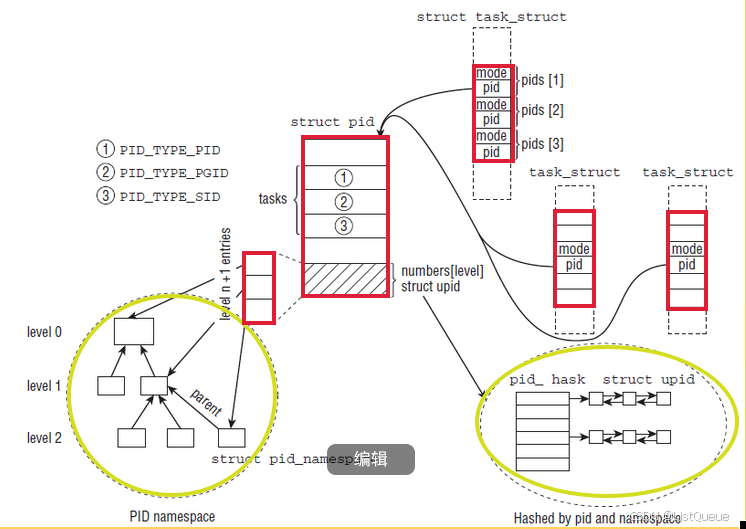
可以看到,多个task_struct指向一个PID,同时PID的hash数组里安装不同的类型对task进行散列,并且一个PID会属于多个命名空间。
三、内核设计task_struct中进程ID相关数据结构
Linux 内核在设计管理ID的数据结构时,要充分考虑以下因素:
-
如何快速地根据进程的 task_struct、ID类型、命名空间找到局部ID。
-
如何快速地根据局部ID、命名空间、ID类型找到对应进程的 task_struct。
-
如何快速地给新进程在可见的命名空间内分配一个唯一的 PID。
3.1一个PID对应一个task时的task_struct设计
一个PID对应一个task_struct如果先不考虑进程之间的关系,不考虑命名空间,仅仅是一个PID号对应一个task_struct,那么我们可以设计这样的数据结构:
需要明确以下几点:
- 每个 PID 唯一对应一个
task_struct。 - 进程是通过 PID 来标识的,
task_struct中包含了进程的状态、调度信息、资源等。 - 为了高效地查找
task_struct,我们需要一个快速的查找方式。最常用的数据结构是哈希表或数组。
设计一个结构来:
- 存储 PID 和
task_struct之间的映射。 - 让 PID 查找
task_struct高效。 - 保证不同的 PID 对应不同的
task_struct,且每个进程都可以通过 PID 唯一标识。
struct task_struct
{
//...
struct pid_link pids;
//...
};
struct pid_link
{
struct hlist_node node;
struct pid *pid;
};
struct pid
{
struct hlist_head tasks; //指回 pid_link 的 node
int nr; //PID
struct hlist_node pid_chain; //pid hash 散列表结点
};
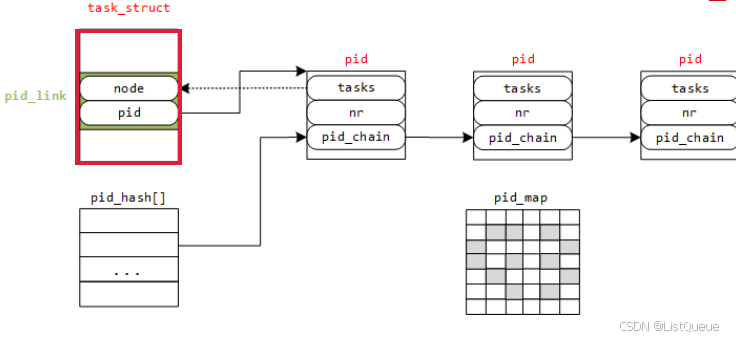
每个进程的 task_struct 结构体中有一个指向 pid 结构体的指针,pid结构体包含了PID号。
1、如何快速地根据局部ID、命名空间、ID类型找到对应进程的 task_struct
图中还有两个结构上面未提及:
pid_hash[]:一个hash表的结构,根据pid的nr值哈希到其某个表项,若有多个 pid 结构对应到同一个表项,这里解决冲突使用的是散列表法。
这样,就能解决开始提出的第2个问题了,根据PID值怎样快速地找到task_struct结构体:
第一步:首先通过 PID 计算 pid 挂接到哈希表 pid_hash[] 的表项
第二步:遍历该表项,找到 pid 结构体中 nr 值与 PID 值相同的那个 pid
第三步:再通过该 pid 结构体的 tasks 指针找到 node
第四步:最后根据内核的 container_of 机制就能找到 task_struct 结构体
2、如何快速地给新进程在可见的命名空间内分配一个唯一的 PID
pid_map 这是一个位图,用来唯一分配PID值的结构,图中灰色表示已经分配过的值,在新建一个进程时,只需在其中找到一个为分配过的值赋给 pid 结构体的 nr,再将pid_map 中该值设为已分配标志。这也就解决了上面的第3个问题——如何快速地分配一个全局的PID
3、如何快速地根据进程的 task_struct、ID类型、命名空间找到局部ID
至于上面的*第1个问题就更加简单,已知 task_struct 结构体,根据其 pid_link 的 pid 指针找到 pid 结构体,取出其 nr 即为 PID 号。
3.2、带进程ID类型的task_struct设计
如果考虑进程之间有复杂的关系,如线程组、进程组、会话组,这些组均有组ID,分别为 TGID、PGID、SID,所以原来的 task_struct 中pid_link 指向一个 pid 结构体需要增加几项,用来指向到其组长的 pid 结构体,相应的 struct pid 原本只需要指回其 PID 所属进程的task_struct,现在要增加几项,用来链接那些以该 pid 为组长的所有进程组内进程。数据结构如下:
enum pid_type
{
PIDTYPE_PID,
PIDTYPE_PGID,
PIDTYPE_SID,
PIDTYPE_MAX
};
struct task_struct
{
...
pid_t pid; //PID
pid_t tgid; //thread group id
...
struct pid_link pids[PIDTYPE_MAX];
struct task_struct *group_leader; // threadgroup leader
...
struct pid_link pids[PIDTYPE_MAX];
struct nsproxy *nsproxy;
};
struct pid_link
{
struct hlist_node node;
struct pid *pid;
};
struct pid
{
struct hlist_head tasks[PIDTYPE_MAX];
int nr; //PID
struct hlist_node pid_chain; // pid hash 散列表结点
};
上面 ID 的类型 PIDTYPE_MAX 表示 ID 类型数目。之所以不包括线程组ID,是因为内核中已经有指向到线程组的 task_struct 指针 group_leader,线程组 ID 无非就是 group_leader 的PID。
假如现在有三个进程A、B、C为同一个进程组,进程组长为A,这样的结构示意图如图:
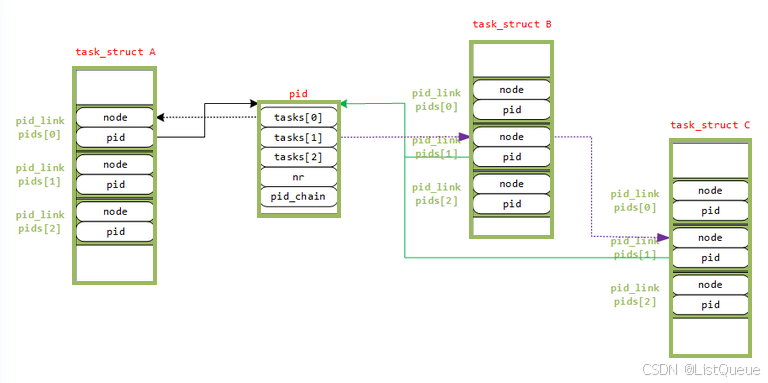
假设:进程B和C的进程组组长为A,那么 pids[PIDTYPE_PGID] 的 pid 指针指向进程A的 pid 结构体;
进程A是进程B和C的组长,进程A的 pid 结构体的 tasks[PIDTYPE_PGID] 是一个散列表的头,它将所有以该pid 为组长的进程链接起来。
再次回顾本节的三个基本问题,在此结构上也很好去实现。
3.3、进一步增加进程PID命名空间的task_struct设计
若在第二种情形下再增加PID命名空间
一个进程就可能有多个PID值了,因为在每一个可见的命名空间内都会分配一个PID,这样就需要改变 pid 的结构了,如下:
include/linux/pid.h
struct upid {
int nr;
struct pid_namespace *ns;
struct hlist_node pid_chain;
};
struct pid
{
refcount_t count;
unsigned int level;
spinlock_t lock;
/* lists of tasks that use this pid */
struct hlist_head tasks[PIDTYPE_MAX];
struct hlist_head inodes;
/* wait queue for pidfd notifications */
wait_queue_head_t wait_pidfd;
struct rcu_head rcu;
struct upid numbers[];
};
在 pid 结构体中增加了一个表示该进程所处的命名空间的层次level,以及一个可扩展的 upid 结构体。对于struct upid,表示在该命名空间所分配的进程的ID,ns指向是该ID所属的命名空间,pid_chain 表示在该命名空间的散列表。
举例来说,在level 2 的某个命名空间上新建了一个进程,分配给它的 pid 为45,映射到 level 1 的命名空间,分配给它的 pid 为 134;再映射到 level 0 的命名空间,分配给它的 pid 为289,对于这样的例子,如图4所示为其表示:
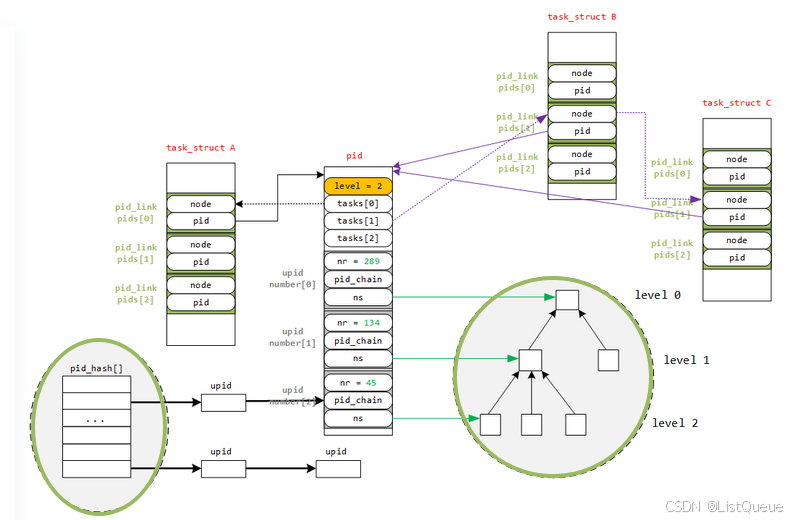
图中关于如果分配唯一的 PID 没有画出,但也是比较简单,与前面两种情形不同的是,这里分配唯一的 PID 是有命名空间的容器的,在PID命名空间内必须唯一,但各个命名空间之间不需要唯一。
至此,已经与 Linux 内核中数据结构相差不多了。
四、进程ID管理函数
有了上面的复杂的数据结构,再加上散列表等数据结构的操作,就可以写出我们前面所提到的三个问题的函数了:
4.1、pid号到struct pid实体
很多时候在写内核模块的时候,需要通过进程的pid找到对应进程的task_struct,其中首先就需要通过进程的pid找到进程的struct pid,
然后再通过struct pid找到进程的task_struct
include/linux/pid.h
/*
* look up a PID in the hash table. Must be called with the tasklist_lock
* or rcu_read_lock() held.
*
* find_pid_ns() finds the pid in the namespace specified
* find_vpid() finds the pid by its virtual id, i.e. in the current namespace
*
* see also find_task_by_vpid() set in include/linux/sched.h
*/
extern struct pid *find_pid_ns(int nr, struct pid_namespace *ns);
extern struct pid *find_vpid(int nr);
/*
* Lookup a PID in the hash table, and return with it's count elevated.
*/
extern struct pid *find_get_pid(int nr);
extern struct pid *find_ge_pid(int nr, struct pid_namespace *);
extern struct pid *alloc_pid(struct pid_namespace *ns, pid_t *set_tid,
size_t set_tid_size);
extern void free_pid(struct pid *pid);
extern void disable_pid_allocation(struct pid_namespace *ns);
find_pid_ns获得 pid 实体的实现原理,主要使用哈希查找。内核使用哈希表组织struct pid,每创建一个新进程,给进程的struct pid都会插入到哈希表中,这时候就需要使用进程
的进程pid和命名ns在哈希表中将相对应的struct pid索引出来,现在可以看下find_pid_ns的传入参数,也是通过nr和ns找到struct pid。
代码如下:
kernel/pid.c
struct pid *find_pid_ns(int nr, struct pid_namespace *ns)
{
return idr_find(&ns->idr, nr);
}
EXPORT_SYMBOL_GPL(find_pid_ns);
lib/idr.c
void *idr_find(const struct idr *idr, unsigned long id)
{
return radix_tree_lookup(&idr->idr_rt, id - idr->idr_base);
}
EXPORT_SYMBOL_GPL(idr_find);
lib/radix-tree.c
void *__radix_tree_lookup(const struct radix_tree_root *root,
unsigned long index, struct radix_tree_node **nodep,
void __rcu ***slotp)
{
struct radix_tree_node *node, *parent;
unsigned long maxindex;
void __rcu **slot;
restart:
parent = NULL;
slot = (void __rcu **)&root->xa_head;
radix_tree_load_root(root, &node, &maxindex);
if (index > maxindex)
return NULL;
while (radix_tree_is_internal_node(node)) {
unsigned offset;
parent = entry_to_node(node);
offset = radix_tree_descend(parent, &node, index);
slot = parent->slots + offset;
if (node == RADIX_TREE_RETRY)
goto restart;
if (parent->shift == 0)
break;
}
if (nodep)
*nodep = parent;
if (slotp)
*slotp = slot;
return node;
}
4.2、获得局部ID
根据进程的 task_struct、ID类型、命名空间,可以很容易获得其在命名空间内的局部ID
获得与task_struct 关联的pid结构体。辅助函数有 task_pid、task_tgid、task_pgrp和task_session,分别用来获取不同类型的ID的pid 实例,如获取 PID 的实例:
static inline struct pid *task_pid(struct task_struct *task)
{
return task->thread_pid;
}
获取线程组的ID,前面也说过,TGID不过是线程组组长的PID而已,所以:
static inline struct pid *task_tgid(struct task_struct *task)
{
return task->signal->pids[PIDTYPE_TGID];
}
而获得PGID和SID,首先需要找到该线程组组长的task_struct,再获得其相应的 pid:
/*
* Without tasklist or RCU lock it is not safe to dereference
* the result of task_pgrp/task_session even if task == current,
* we can race with another thread doing sys_setsid/sys_setpgid.
*/
static inline struct pid *task_pgrp(struct task_struct *task)
{
return task->signal->pids[PIDTYPE_PGID];
}
static inline struct pid *task_session(struct task_struct *task)
{
return task->signal->pids[PIDTYPE_SID];
}
获得 pid 实例之后,再根据 pid 中的numbers 数组中 uid 信息,获得局部PID。
pid_t pid_nr_ns(struct pid *pid, struct pid_namespace *ns)
{
struct upid *upid;
pid_t nr = 0;
if (pid && ns->level <= pid->level)
{
upid = &pid->numbers[ns->level];
if (upid->ns == ns)
nr = upid->nr;
}
return nr;
}
这里值得注意的是,由于PID命名空间的层次性,父命名空间能看到子命名空间的内容,反之则不能,因此,函数中需要确保当前命名空间的level 小于等于产生局部PID的命名空间的level。
除了这个函数之外,内核还封装了其他函数用来从 pid 实例获得 PID 值,如 pid_nr、pid_vnr 等。在此不介绍了。
结合这两步,内核提供了更进一步的封装,提供以下函数:
pid_t task_pid_nr_ns(struct task_struct *tsk, struct pid_namespace *ns);
pid_t task_tgid_nr_ns(struct task_struct *tsk, struct pid_namespace *ns);
pid_t task_pigd_nr_ns(struct task_struct *tsk, struct pid_namespace *ns);
pid_t task_session_nr_ns(struct task_struct *tsk, struct pid_namespace *ns);
从函数名上就能推断函数的功能,其实不外于封装了上面的两步。
4.3、根据PID查找进程task_struct
-
根据PID号(nr值)取得task_struct 结构体
-
根据PID以及其类型(即为局部ID和命名空间)获取task_struct结构体
如果根据的是进程的ID号,我们可以先通过ID号(nr值)获取到进程struct pid实体(局部ID),然后根据局部ID、以及命名空间,获得进程的task_struct结构体
可以使用pid_task根据pid和pid_type获取到进程的task
struct task_struct *pid_task(struct pid *pid, enum pid_type type)
{
struct task_struct *result = NULL;
if (pid) {
struct hlist_node *first;
first = rcu_dereference_check(hlist_first_rcu(&pid->tasks[type]),
lockdep_tasklist_lock_is_held());
if (first)
result = hlist_entry(first, struct task_struct, pids[(type)].node);
}
return result;
}
那么我们根据pid号查找进程task的过程就成为
pTask = pid_task(find_vpid(pid), PIDTYPE_PID);
内核还提供其它函数用来实现上面两步:
struct task_struct *find_task_by_pid_ns(pid_t nr, struct pid_namespace *ns);
struct task_struct *find_task_by_vpid(pid_t vnr);
struct task_struct *find_task_by_pid(pid_t vnr);
由于linux进程是组织在双向链表和红黑树中的,因此我们通过遍历链表或者树也可以找到当前进程,但是这个并不是我们今天的重点
4.4、生成唯一的PID
内核中使用下面两个函数来实现分配和回收PID的:
static int alloc_pidmap(struct pid_namespace *pid_ns);
static void free_pidmap(struct upid *upid);
在这里我们不关注这两个函数的实现,反而应该关注分配的 PID 如何在多个命名空间中可见,这样需要在每个命名空间生成一个局部ID,函数 alloc_pid 为新建的进程分配PID,简化版如下:
struct pid *alloc_pid(struct pid_namespace *ns, pid_t *set_tid,
size_t set_tid_size)
{
struct pid *pid;
enum pid_type type;
int i, nr;
struct pid_namespace *tmp;
struct upid *upid;
int retval = -ENOMEM;
/*
* set_tid_size contains the size of the set_tid array. Starting at
* the most nested currently active PID namespace it tells alloc_pid()
* which PID to set for a process in that most nested PID namespace
* up to set_tid_size PID namespaces. It does not have to set the PID
* for a process in all nested PID namespaces but set_tid_size must
* never be greater than the current ns->level + 1.
*/
if (set_tid_size > ns->level + 1)
return ERR_PTR(-EINVAL);
pid = kmem_cache_alloc(ns->pid_cachep, GFP_KERNEL);
if (!pid)
return ERR_PTR(retval);
tmp = ns;
pid->level = ns->level;
for (i = ns->level; i >= 0; i--) {
int tid = 0;
if (set_tid_size) {
tid = set_tid[ns->level - i];
retval = -EINVAL;
if (tid < 1 || tid >= pid_max)
goto out_free;
/*
* Also fail if a PID != 1 is requested and
* no PID 1 exists.
*/
if (tid != 1 && !tmp->child_reaper)
goto out_free;
retval = -EPERM;
if (!checkpoint_restore_ns_capable(tmp->user_ns))
goto out_free;
set_tid_size--;
}
idr_preload(GFP_KERNEL);
spin_lock_irq(&pidmap_lock);
if (tid) {
nr = idr_alloc(&tmp->idr, NULL, tid,
tid + 1, GFP_ATOMIC);
/*
* If ENOSPC is returned it means that the PID is
* alreay in use. Return EEXIST in that case.
*/
if (nr == -ENOSPC)
nr = -EEXIST;
} else {
int pid_min = 1;
/*
* init really needs pid 1, but after reaching the
* maximum wrap back to RESERVED_PIDS
*/
if (idr_get_cursor(&tmp->idr) > RESERVED_PIDS)
pid_min = RESERVED_PIDS;
/*
* Store a null pointer so find_pid_ns does not find
* a partially initialized PID (see below).
*/
nr = idr_alloc_cyclic(&tmp->idr, NULL, pid_min,
pid_max, GFP_ATOMIC);
}
spin_unlock_irq(&pidmap_lock);
idr_preload_end();
if (nr < 0) {
retval = (nr == -ENOSPC) ? -EAGAIN : nr;
goto out_free;
}
pid->numbers[i].nr = nr;
pid->numbers[i].ns = tmp;
tmp = tmp->parent;
}
/*
* ENOMEM is not the most obvious choice especially for the case
* where the child subreaper has already exited and the pid
* namespace denies the creation of any new processes. But ENOMEM
* is what we have exposed to userspace for a long time and it is
* documented behavior for pid namespaces. So we can't easily
* change it even if there were an error code better suited.
*/
retval = -ENOMEM;
get_pid_ns(ns);
refcount_set(&pid->count, 1);
spin_lock_init(&pid->lock);
for (type = 0; type < PIDTYPE_MAX; ++type)
INIT_HLIST_HEAD(&pid->tasks[type]);
init_waitqueue_head(&pid->wait_pidfd);
INIT_HLIST_HEAD(&pid->inodes);
upid = pid->numbers + ns->level;
spin_lock_irq(&pidmap_lock);
if (!(ns->pid_allocated & PIDNS_ADDING))
goto out_unlock;
for ( ; upid >= pid->numbers; --upid) {
/* Make the PID visible to find_pid_ns. */
idr_replace(&upid->ns->idr, pid, upid->nr);
upid->ns->pid_allocated++;
}
spin_unlock_irq(&pidmap_lock);
return pid;
out_unlock:
spin_unlock_irq(&pidmap_lock);
put_pid_ns(ns);
out_free:
spin_lock_irq(&pidmap_lock);
while (++i <= ns->level) {
upid = pid->numbers + i;
idr_remove(&upid->ns->idr, upid->nr);
}
/* On failure to allocate the first pid, reset the state */
if (ns->pid_allocated == PIDNS_ADDING)
idr_set_cursor(&ns->idr, 0);
spin_unlock_irq(&pidmap_lock);
kmem_cache_free(ns->pid_cachep, pid);
return ERR_PTR(retval);
}

















 98
98

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









