






训练无条件图像生成-Unconditional image generation模型,准备自己的数据集
我使用的是台大李宏毅老师2022年课程GAN作业的动漫头像数据集huggingface下载链接
下载后解压即可
训练步骤参考:diffusers官方教程
加载数据集:
from dataclasses import dataclass
from datasets import load_dataset
import matplotlib.pyplot as plt
from torchvision import transforms
import torch
from diffusers import UNet2DModel, DDPMScheduler, DDPMPipeline
from diffusers.optimization import get_cosine_schedule_with_warmup
from diffusers.utils import make_image_grid
from PIL import Image
import torch.nn.functional as F
import os
from accelerate import Accelerator, notebook_launcher
from tqdm.auto import tqdm
from pathlib import Path
import glob
# 设置训练配置
@dataclass
class TrainingConfig:
image_size = 64 # the generated image resolution, 数据集是96的,但是我显卡太差,96要跑到天荒地老,所以设的小
train_batch_size = 32
eval_batch_size = 16 # how many images to sample during evaluation
num_epochs = 100
gradient_accumulation_steps = 1
learning_rate = 1e-4
lr_warmup_steps = 500
save_image_epochs = 10
save_model_epochs = 30
mixed_precision = "fp16" # `no` for float32, `fp16` for automatic mixed precision
output_dir = "ddpm-anime-faces-64" # the model name locally and on the HF Hub
push_to_hub = False # whether to upload the saved model to the HF Hub
# hub_model_id = "<your-username>/<my-awesome-model>" # the name of the repository to create on the HF Hub
# hub_private_repo = None
overwrite_output_dir = True # overwrite the old model when re-running the notebook
seed = 0
config = TrainingConfig()
# 加载数据集
dataset = load_dataset(
"imagefolder", data_dir=r"xxx/dataset/xxx") # 换成自己的数据集路径
# 数据集一共有七万多张图,全部训练太耗时了,选部分出来训练
# 加了shuffle训练时会比不加更慢,原因待查
# dataset['train'] = dataset['train'].shuffle(seed=config.seed).select(range(0, 10000))
dataset['train'] = dataset['train'].select(range(0, 10000))
# fig, axs = plt.subplots(1, 4, figsize=(16, 8))
# for i, image in enumerate(dataset['train'][:4]['image']):
# axs[i].imshow(image)
# axs[i].set_axis_off()
# plt.show()
preprocess = transforms.Compose(
[
transforms.Resize((config.image_size, config.image_size)),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]),
]
)
def transform(example):
images = [preprocess(image.convert("RGB")) for image in example["image"]]
return {"images": images}
dataset.set_transform(transform)
train_dataloader = torch.utils.data.DataLoader(
dataset['train'], batch_size=config.train_batch_size, shuffle=True)定义模型:
model = UNet2DModel(
sample_size=config.image_size,
in_channels=3,
out_channels=3,
layers_per_block=2,
block_out_channels=(128, 256, 512, 512),
down_block_types=(
"DownBlock2D",
"DownBlock2D",
"AttnDownBlock2D",
"DownBlock2D",
),
up_block_types=(
"UpBlock2D",
"AttnUpBlock2D",
"UpBlock2D",
"UpBlock2D",
),
)
sample_image = dataset["train"][0]["images"].unsqueeze(0)
print("Input shape:", sample_image.shape)
print("Output shape:", model(sample_image, timestep=0).sample.shape)定义概率公式β,α那些东西
noise_scheduler = DDPMScheduler(
num_train_timesteps=1000,
)定义优化器,学习率规则
optimizer = torch.optim.AdamW(model.parameters(), lr=config.learning_rate)
lr_scheduler = get_cosine_schedule_with_warmup(
optimizer=optimizer,
num_warmup_steps=config.lr_warmup_steps,
num_training_steps=config.num_epochs * len(train_dataloader),
)定义evaluate:
def evaluate(config, epoch, pipeline):
images = pipeline(
batch_size=config.eval_batch_size,
generator=torch.Generator(device="cpu").manual_seed(config.seed),
).images
grid = make_image_grid(images, rows=4, cols=4)
test_dir = os.path.join(config.output_dir, "samples")
os.makedirs(test_dir, exist_ok=True)
grid.save(f"{test_dir}/{epoch:04d}.png")定义训练过程:
def train_loop(config, model, noise_scheduler, optimizer, train_dataloader, lr_scheduler):
accelerator = Accelerator(
mixed_precision=config.mixed_precision,
gradient_accumulation_steps=config.gradient_accumulation_steps,
log_with="tensorboard",
project_dir=os.path.join(config.output_dir, "logs"),
)
if accelerator.is_main_process:
if config.output_dir is not None:
os.makedirs(config.output_dir, exist_ok=True)
accelerator.init_trackers("train_example")
model, optimizer, train_dataloader, lr_scheduler = accelerator.prepare(
model, optimizer, train_dataloader, lr_scheduler
)
global_step = 0
for epoch in range(config.num_epochs):
progress_bar = tqdm(total=len(train_dataloader), disable=not accelerator.is_local_main_process)
progress_bar.set_description(f"Epoch {epoch}")
for step, batch in enumerate(train_dataloader):
clean_images = batch["images"]
noise = torch.randn(clean_images.shape, device=clean_images.device)
bs = clean_images.shape[0]
timesteps = torch.randint(
0, noise_scheduler.config.num_train_timesteps, (bs,), device=clean_images.device,
dtype=torch.int64
)
noisy_images = noise_scheduler.add_noise(clean_images, noise, timesteps)
with accelerator.accumulate(model):
noise_pred = model(noisy_images, timesteps, return_dict=False)[0]
loss = F.mse_loss(noise_pred, noise)
accelerator.backward(loss)
if accelerator.sync_gradients:
accelerator.clip_grad_norm_(model.parameters(), 1.0)
optimizer.step()
lr_scheduler.step()
optimizer.zero_grad()
progress_bar.update(1)
logs = {"loss": loss.detach().item(), "lr": lr_scheduler.get_last_lr()[0], "step": global_step}
progress_bar.set_postfix(**logs)
accelerator.log(logs, step=global_step)
global_step += 1
if accelerator.is_main_process:
pipeline = DDPMPipeline(unet=accelerator.unwrap_model(model), scheduler=noise_scheduler)
if (epoch + 1) % config.save_image_epochs == 0 or epoch == config.num_epochs - 1:
evaluate(config, epoch, pipeline)
if (epoch + 1) % config.save_model_epochs == 0 or epoch == config.num_epochs - 1:
pipeline.save_pretrained(config.output_dir)开始训练:
args = (config, model, noise_scheduler, optimizer, train_dataloader, lr_scheduler)
notebook_launcher(train_loop, args, num_processes=1) 结果生成:
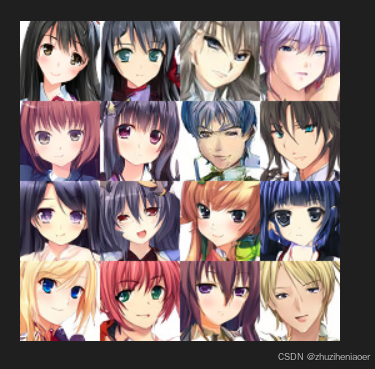
sample是每10个epoch生成的采样图
第60个epoch采样图效果:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









