




Harris 角点检测算法(也称Harris & Stephens 角点检测器)是一个极为简单的角点检测算法。该算法的主要思想是,如果像素周围显示存在多于一个方向的边,我们认为该点为兴趣点。该点就称为角点。
from PIL import Image
from numpy import *
from pylab import *
from scipy.ndimage import filters
def compute_harris_response(im,sigma=3):
""" 在一幅灰度图像中,对每个像素计算Harris 角点检测器响应函数"""
# 计算导数
imx = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (0,1), imx)
imy = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (1,0), imy)
# 计算Harris 矩阵的分量
Wxx = filters.gaussian_filter(imx*imx,sigma)
Wxy = filters.gaussian_filter(imx*imy,sigma)
Wyy = filters.gaussian_filter(imy*imy,sigma)
# 计算特征值和迹
Wdet = Wxx*Wyy - Wxy**2
Wtr = Wxx + Wyy
return Wdet / Wtr
def get_harris_points(harrisim,min_dist=10,threshold=0.1):
""" 从一幅Harris 响应图像中返回角点。min_dist 为分割角点和图像边界的最少像素数目"""
# 寻找高于阈值的候选角点
corner_threshold = harrisim.max() * threshold
harrisim_t = (harrisim > corner_threshold) * 1
# 得到候选点的坐标
coords = array(harrisim_t.nonzero()).T
# 以及它们的Harris 响应值
candidate_values = [harrisim[c[0],c[1]] for c in coords]
# 对候选点按照Harris 响应值进行排序
index = argsort(candidate_values)
# 将可行点的位置保存到数组中
allowed_locations = zeros(harrisim.shape)
allowed_locations[min_dist:-min_dist,min_dist:-min_dist] = 1
# 按照min_distance 原则,选择最佳Harris 点
filtered_coords = []
for i in index:
if allowed_locations[coords[i,0],coords[i,1]] == 1:
filtered_coords.append(coords[i])
allowed_locations[(coords[i,0]-min_dist):(coords[i,0]+min_dist),
(coords[i,1]-min_dist):(coords[i,1]+min_dist)] = 0
return filtered_coords
def plot_harris_points(image,filtered_coords):
""" 绘制图像中检测到的角点"""
figure()
gray()
imshow(image)
plot([p[1] for p in filtered_coords],[p[0] for p in filtered_coords],'*')
axis('off')
show()
im = array(Image.open('ji.jpg').convert('L'))
harrisim = compute_harris_response(im)
filtered_coords = get_harris_points(harrisim,6)
plot_harris_points(im, filtered_coords) 输出:
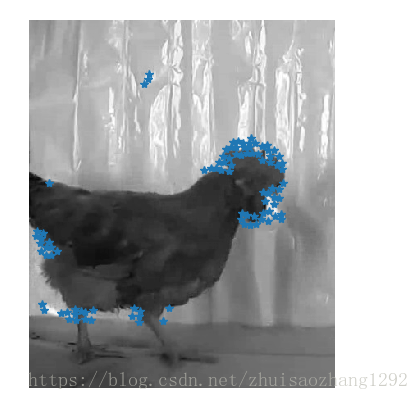
Harris角点检测器检测图像中的兴趣点
harris.py
from PIL import Image
from pylab import *
from scipy.ndimage import filters
def compute_harris_response(im,sigma=3):
""" 在一幅灰度图像中,对每个像素计算Harris 角点检测器响应函数"""
# 计算导数
imx = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (0,1), imx)
imy = zeros(im.shape)
filters.gaussian_filter(im, (sigma,sigma), (1,0), imy)
# 计算Harris 矩阵的分量
Wxx = filters.gaussian_filter(imx*imx,sigma)
Wxy = filters.gaussian_filter(imx*imy,sigma)
Wyy = filters.gaussian_filter(imy*imy,sigma)
# 计算特征值和迹
Wdet = Wxx*Wyy - Wxy**2
Wtr = Wxx + Wyy
return Wdet / Wtr
def get_harris_points(harrisim,min_dist=10,threshold=0.1):
""" 从一幅Harris 响应图像中返回角点。min_dist 为分割角点和图像边界的最少像素数目"""
# 寻找高于阈值的候选角点
corner_threshold = harrisim.max() * threshold
harrisim_t = (harrisim > corner_threshold) * 1
# 得到候选点的坐标
coords = array(harrisim_t.nonzero()).T
# 以及它们的Harris 响应值
candidate_values = [harrisim[c[0],c[1]] for c in coords]
# 对候选点按照Harris 响应值进行排序
index = argsort(candidate_values)
# 将可行点的位置保存到数组中
allowed_locations = zeros(harrisim.shape)
allowed_locations[min_dist:-min_dist,min_dist:-min_dist] = 1
# 按照min_distance 原则,选择最佳Harris 点
filtered_coords = []
for i in index:
if allowed_locations[coords[i,0],coords[i,1]] == 1:
filtered_coords.append(coords[i])
allowed_locations[(coords[i,0]-min_dist):(coords[i,0]+min_dist),
(coords[i,1]-min_dist):(coords[i,1]+min_dist)] = 0
return filtered_coords
def plot_harris_points(image,filtered_coords):
""" 绘制图像中检测到的角点"""
figure()
gray()
imshow(image)
plot([p[1] for p in filtered_coords],[p[0] for p in filtered_coords],'*')
axis('off')
show()
def get_descriptors(image,filtered_coords,wid=5):
""" 对于每个返回的点,返回点周围2*wid+1 个像素的值(假设选取点的min_distance > wid)"""
desc = []
for coords in filtered_coords:
patch = image[coords[0]-wid:coords[0]+wid+1,
coords[1]-wid:coords[1]+wid+1].flatten()
desc.append(patch)
return desc
def match(desc1,desc2,threshold=0.5):
""" 对于第一幅图像中的每个角点描述子,使用归一化互相关,选取它在第二幅图像中的匹配角点"""
n = len(desc1[0])
# 点对的距离
d = -ones((len(desc1),len(desc2)))
for i in range(len(desc1)):
for j in range(len(desc2)):
d1 = (desc1[i] - mean(desc1[i])) / std(desc1[i])
d2 = (desc2[j] - mean(desc2[j])) / std(desc2[j])
ncc_value = sum(d1 * d2) / (n-1)
if ncc_value > threshold:
d[i,j] = ncc_value
ndx = argsort(-d)
matchscores = ndx[:,0]
return matchscores
def match_twosided(desc1,desc2,threshold=0.5):
""" 两边对称版本的match()"""
matches_12 = match(desc1,desc2,threshold)
matches_21 = match(desc2,desc1,threshold)
ndx_12 = where(matches_12 >= 0)[0]
# 去除非对称的匹配
for n in ndx_12:
if matches_21[matches_12[n]] != n:
matches_12[n] = -1
return matches_12
def appendimages(im1,im2):
""" 返回将两幅图像并排拼接成的一幅新图像"""
# 选取具有最少行数的图像,然后填充足够的空行
rows1 = im1.shape[0]
rows2 = im2.shape[0]
if rows1 < rows2:
im1 = concatenate((im1,zeros((rows2-rows1,im1.shape[1]))),axis=0)
elif rows1 > rows2:
im2 = concatenate((im2,zeros((rows1-rows2,im2.shape[1]))),axis=0)
# 如果这些情况都没有,那么它们的行数相同,不需要进行填充
return concatenate((im1,im2), axis=1)
def plot_matches(im1,im2,locs1,locs2,matchscores,show_below=True):
""" 显示一幅带有连接匹配之间连线的图片
输入:im1,im2(数组图像),locs1,locs2(特征位置),matchscores(match() 的输出),
show_below(如果图像应该显示在匹配的下方)"""
im3 = appendimages(im1,im2)
if show_below:
im3 = vstack((im3,im3))
imshow(im3)
cols1 = im1.shape[1]
for i,m in enumerate(matchscores):
if m>0:
plot([locs1[i][1],locs2[m][1]+cols1],[locs1[i][0],locs2[m][0]],'c')
axis('off')
import harris
from numpy import *
from pylab import *
from PIL import Image
im1 = array(Image.open('hcl.jpg').convert('L'))
im2 = array(Image.open('ln.jpg').convert('L'))
wid = 5
harrisim = harris.compute_harris_response(im1,5)
filtered_coords1 = harris.get_harris_points(harrisim,wid+1)
d1 = harris.get_descriptors(im1,filtered_coords1,wid)
harrisim = harris.compute_harris_response(im2,5)
filtered_coords2 = harris.get_harris_points(harrisim,wid+1)
d2 = harris.get_descriptors(im2,filtered_coords2,wid)
print ('starting matching')
matches = harris.match_twosided(d1,d2)
figure()
gray()
harris.plot_matches(im1,im2,filtered_coords1,filtered_coords2,matches)
show()
















 2361
2361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









