







2023 IEEE International Conference on Robotics and Automation (ICRA 2023) May 29 - June 2, 2023. London, UK
Teodoro Dias, Meysam Basiri
这篇博文是自己看文章顺手做的笔记 只是简单翻译和整理 仅做个人参考学习和分享
如果作者看到觉得内容不妥请联系我 我会及时处理
本人非文章作者,文献的引用格式如下,原文更有价值
T. Dias and M. Basiri, "BogieCopter: A Multi-Modal Aerial-Ground Vehicle for Long-Endurance Inspection Applications," 2023 IEEE International Conference on Robotics and Automation (ICRA), London, United Kingdom, 2023, pp. 3303-3309, doi: 10.1109/ICRA48891.2023.10161038.
keywords: {Energy consumption;Actuators;Automation;Surveillance;Wheels;Land surface;Inspection},
Abstract—
I. INTRODUCTION
To the best of our knowledge, this is the most complete review of research available for multimodal aerial-ground vehicles.
主要贡献:
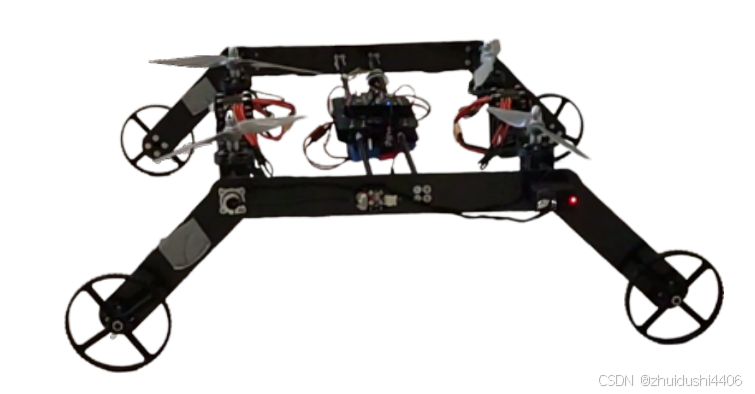
提出新的陆空两栖设计,基于倾转多旋翼构型和被动轮,安全高效
做了目前最全的陆空两栖文献分析
实验验证两栖运动能力和能耗
II. STATE-OF-THE-ART
Passive actuated or Active actuated
A. Conventional Passive Actuated Designs
III. PROPOSED DESIGN: BOGIECOPTER
A. Design Procedure
IV. EXPERIMENTS AND RESULTS
Aerial Locomotion:
Flat Surface Locomotion:
Multi-modal Capability:
Inclined Surface Locomotion:
Wall-Climbing:
总结:
静心设计了一种倾转旋翼多旋翼构型的被动轮两栖无人机,具备平坦和陡峭的平面运动能力和飞行能力,同时取得了低的额外重量,高的地面运动能量效率和可观的负载能力而且具有更好的安全性,但是暂未设计完善的运动控制器。
极强的负载能力大约2kg,机身空载2kg,飞行时长十分钟,地面运动可达11.5km


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









