



作者:金旺
国庆假期回来后,英特尔就官宣发布了一款重磅产品,第三代酷睿Ultra处理器,这是英特尔首款基于Intel 18A制程工艺打造的面向客户端的处理器。
Intel 18A是英特尔研发并制造的最先进半导体节点,也被视为是英特尔逆风翻盘的一项重要技术。
因而,此次同样基于Intel 18A制程工艺打造的,还有英特尔至强6+处理器。
我们此前在2025云栖大会上看到的那款神秘的服务器处理器,现在终于有了确切的官方消息——它果然不叫至强7,而被命名为至强6+。
也是英特尔面向下一代服务器打造的处理器产品。
01 为什么不是至强7?
就在前不久的2025云栖大会上,英特尔正式对外展示了这款面向下一代服务器打造的处理器。
由于暂未发布,英特尔官方当时并未对外过多介绍这款产品,我们当时只是知道,这款产品会采用英特尔压箱底的18A制程工艺,会有多达288个核。
彼时,大家都在猜测,这款产品是否会被命名为英特尔至强7。
直到近日的媒体沟通会上,英特尔正式官宣了这款产品的更多详细消息,这款代号为Clearwater Forest的服务器处理器,被命名为英特尔至强6+。
为什么会有这样的命名?
据英特尔技术专家解释,Clearwater Forest与当前英特尔至强6系列产品共享同一平台架构——Birch Stream。
Birch Stream分为SP和AP两种不同的平台和机箱设计,具体而言,英特尔至强6+则是基于Birch Stream AP平台设计。
这意味着,对于已经部署Granite Rapids AP(英特尔至强6性能核)服务器系统的客户,只需进行软件层面的更新,即可直接将CPU替换为Clearwater Forest,无需更换主板、电源或散热系统,实现直接升级。
不过,英特尔技术专家也特别指出,Clearwater Forest 6E系列,主要基于Birch Stream SP平台,因此,如果客户当前使用的是支持Sierra Forest能效核的Birch Stream SP系统,由于平台差异,无法直接安装Clearwater Forest AP CPU,这存在兼容性区别。
正是因为这种在服务器系统上的产品兼容性,所以从服务器系统端来看,这代产品与英特尔至强6处理器本质上属于同一个产品家族,这也是英特尔最终将这代产品命名为英特尔至强6+的主要原因。
那么,英特尔至强6+,究竟“+”了什么?
02 至强6+,“+”了什么?
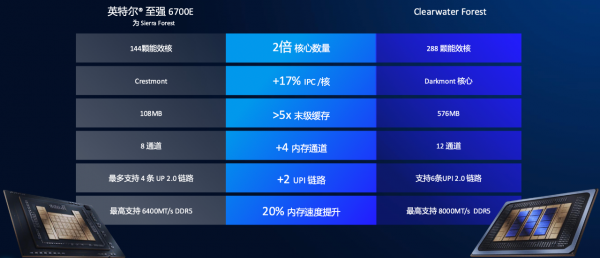
作为英特尔首款基于Intel 18A制程工艺的服务器处理器,英特尔至强6+核心能力特性包括以下几个方面:
288个Darkmont能效核:单颗CPU集成288个全新设计的能效核,较上一代Sierra Forest(144核)翻倍;
17%的IPC提升:在相同功耗下,每核性能提升17%;
12通道DDR5-8000内存:支持高达8000MT/s的内存速度;
576MB末级缓存:通过3D堆叠技术大幅扩展了三级缓存;
96条PCIe Gen5通道,其中64条支持最新的CXL2.0技术;
安全方面,支持主流的TDX、SGX可信计算技术,并特别支持SHA-512、SM3、SM4加速。

这里特别值得一提的是,英特尔首次在这代服务器处理器上应用的Intel 18A和3D封装两项技术。
Intel 18A是英特尔首个融合了RibbonFET(全环绕栅极晶体管)与PowerVia(背面供电)的制程节点。
RibbonFET通过三维堆叠结构,实现了对沟道电流的360度精准电流控制,显著提升了每瓦性能,降低了芯片的工作电压和静电特性;
PowerVia则是在晶体管背面增加了专用于电源互联的金属层,通过将电源互联和信号互联分开,有效地解决了信号与电源之间相互抢占金属层资源的矛盾,降低了布线的拥塞,带来了性能提升,同时可以更好地优化信号连接层的布局布线,从而达到更高的单元利用率的目的。
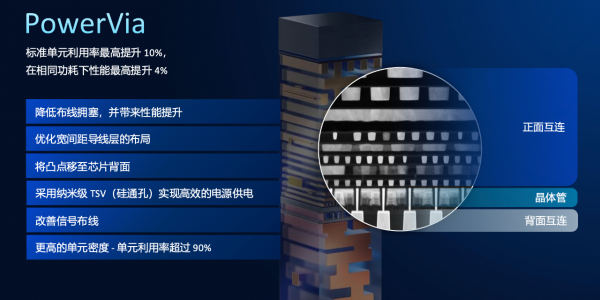
正是在RibbonFET和PowerVia两项技术加持下,英特尔至强6+处理器将单元利用率提高了10%,相同功耗下性能提高了4%。
英特尔至强6+处理器用到的另一项关键技术是Foveros Direct 3D封装技术,并由此实现了芯片间的高密度、低功耗互联。
据英特尔技术专家介绍称,通过混合键合铜互联与下方的Base Chiplet相连,并将有源硅基板再通过底层的键合与封装相连,I/O晶片和Base晶片通过EMIB-M 2.5D封装互联,最终整个Clearwater Forest某种意义上实现了3.5D互联。
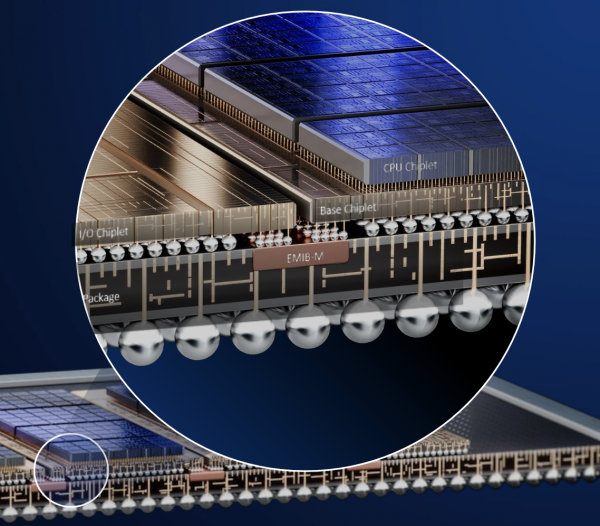
正是借助Foveros Direct 3D技术,英特尔至强6+实现了高密度、低电阻的晶片间互联,功耗/比特性能可以达到0.05pJ/bit,这样的参数相当于2.5D技术所能达到功耗的1/10。
03 至强6+,能为数据中心带来什么?
与上一代英特尔至强6能效核处理器相比,英特尔至强6+处理器在多个维度实现性能升级——核心数翻倍、IPC提升17%、缓存容量增长5倍、内存带宽提升20%。
而如果是与第二代英特尔至强可扩展处理器相比,其优势更为凸显——仅需20个机架(180台服务器)即可替代1400台旧服务器,实现了8:1的服务器整合比,同时降低了71%的数据中心空间占用、减少了750kW功耗,并提升了3.5倍的性能/瓦特比。
这种性能提升不仅体现在硬件参数上,具体到客户使用上来看,英特尔技术专家告诉我们,英特尔至强6+主要专注于能效核开发,通过大幅增加单CPU内核数量,以适应吞吐型应用,这类应用能通过规模化扩展实现很好的性能倍增,且核心间通信依赖性低。
这样的产品优势最终会服务于5G核心网、Web服务、微服务架构等高并发、低耦合应用场景,在这些场景中显著提升单位机架的虚拟机部署密度与请求处理能力。

















 1284
1284

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}