







 本文通过欧拉-拉格朗日方程法,详细分析了双连杆笛卡尔机械臂和平面肘部机械手的动力学方程推导过程。从动能、势能的计算入手,逐步引导读者理解并掌握复杂机械臂动力学公式的形成。
本文通过欧拉-拉格朗日方程法,详细分析了双连杆笛卡尔机械臂和平面肘部机械手的动力学方程推导过程。从动能、势能的计算入手,逐步引导读者理解并掌握复杂机械臂动力学公式的形成。
《机器人动力学与控制》第九章——动力学
9.4 欧拉-拉格朗日方程法应用举例(上)
本节我们用前面学到的欧拉-拉格朗日方程分析法来分析四种不同结构的机械臂,并尝试着推导对应的动力学方程。这些例子由简入深,我们先从一个双连杆机械臂开始,最后到一个具有五个连杆的机械臂。这里建议大家自己跟着过程推一波公式,虽然不一定能让你对动力学有更深层次的理解(步骤都是死的),但起码可以通过推导2轴机器人去感受6轴机器人动力学公式的恐怖。
9.4.1. 双连杆笛卡尔机械臂
考虑下图具有两个连杆和两个移动关节的机械臂:
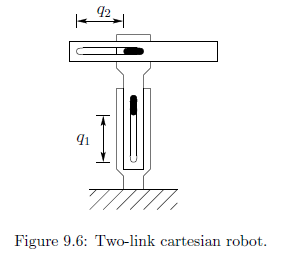
分别用
m
1
m_1
m1 和
m
2
m_2
m2 来表示连杆1和连杆2的质量,用
q
1
q_1
q1 和
q
2
q_2
q2 来表示两个关节的位移量,用
f
1
f_1
f1 和
f
2
f_2
f2 来表示作用在每个关节的力。因为没有转动关节,因此我们不需要考虑转动动能与转动势能。
动能
由于
q
1
q_1
q1 和
q
2
q_2
q2 可以用来表达这个系统的generalized coordinate(这句话直译,具体含义没搞懂),动能可以用如下公式表达:

势能仅仅与q1和q2有关,我们用9.3节学到的公式来推导动力学方程。两个关节只有位移没有旋转,所以角速度Jacobian系数为零,该系统的动能只与移动关节的位移速度有关。
通过雅各比矩阵的学习可知连杆1重心的速度等于:
其中

这里省略了建立坐标系,推导雅各比矩阵的过程,请自行推导。类似地,可以得到:
因此该系统的全部动能可以表达为

势能
下面就需要推导势能了,根据机器人的结构可以发现,m1和m2的势能都只与q1有关,很容易就能得到该结构的总势能
书写动力学方程
有了动能和势能就可以通过写动力学方程了。这里有两种方法,一个是根据定义先写出拉格朗日系数
然后使用力的计算公式
第二种方式是用上一节我们刚刚学习的结论,直接套用公式

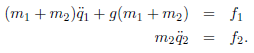
可以发现 D(q) 已知,由于dij与q无关,因此Christoffel项都是0。另外D的非对角项都为0,所以动力学公式变为

由于

所以最终动力学公式为
9.4.2.平面肘部机械手
现在我们来看另一个例子,如下图所示,该机器人有且仅有两个旋转关节。
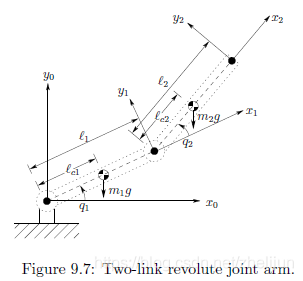
坐标系都已经在图里面帮你们建好了,请自行验证。Ii代表连杆i关于一根过其质心指向朝外的轴的惯量矩。
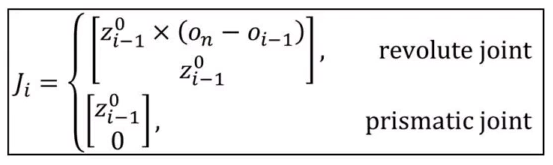
我们继续使用雅各比矩阵的知识求解速度先,雅各比矩阵推导规则如下
首先
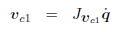
接着
同理

因此动能里面平动部分的能量为

现在我们来处理转动部分能量,根据该机械结构可以方便的得到

根据雅各布矩阵得到的也是一样的结果
接着带入动能表达式得到
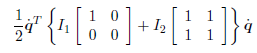
把平动部分能量和转动部分能量相加得到

因此

接着
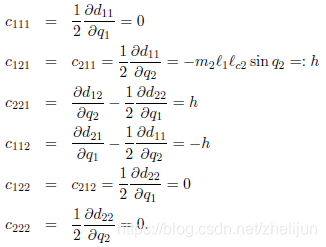
注意,这里面的计算还是比较烦的,我这边省略了不少中间过程直接把结果贴出来。
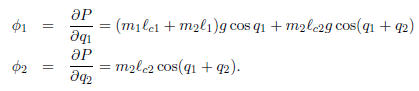
接下来研究机械臂的势能,势能只与q的大小有关,因此

所以
最后我们带入动力学方程得到

这里面的C项为
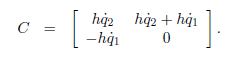
请务必自己推一波,多准备点纸。
参考文献
《robot dynamics and control》 作者:Mark W Spong,Seth Hutchinson, and M. Vidyasagar


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









