




 本文深入探讨了二叉树的右视图算法,包括深度优先搜索(DFS)和广度优先搜索(BFS)两种方法。通过实例分析,详细解释了如何使用这两种搜索策略来获取二叉树每一层的最右侧节点,同时提供了代码实现。
本文深入探讨了二叉树的右视图算法,包括深度优先搜索(DFS)和广度优先搜索(BFS)两种方法。通过实例分析,详细解释了如何使用这两种搜索策略来获取二叉树每一层的最右侧节点,同时提供了代码实现。
作者:LeetCode-Solution
链接:https://leetcode-cn.com/problems/binary-tree-right-side-view/solution/er-cha-shu-de-you-shi-tu-by-leetcode-solution/
二叉树的右视图
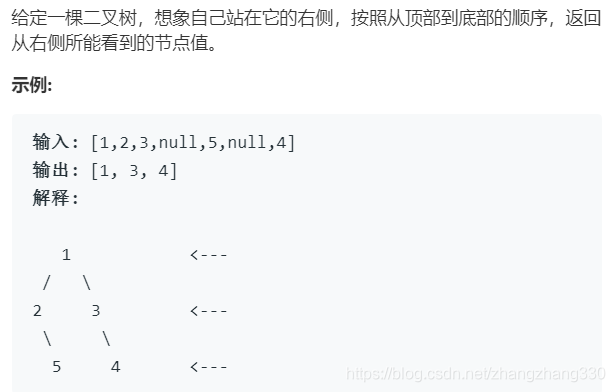
题目描述
题解
二叉树层次层数即为右视图的节点数。
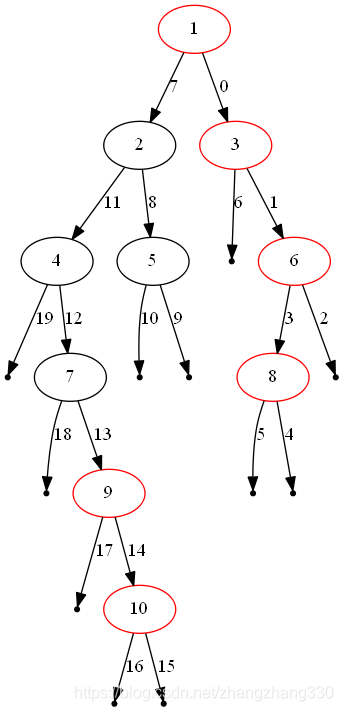
方法一:深度优先搜索DFS
DFS总是先搜索到最右子树,每一层最先访问到最右边的节点。存储在每个深度访问的第一个结点,根据树的层数得到最终的结果数组。
复杂度分析
时间复杂度 : O(n)O(n)O(n)。深度优先搜索最多访问每个结点一次,因此是线性复杂度。
空间复杂度 : O(n)O(n)O(n)。最坏情况下,栈内会包含接近树高度的结点数量,占用 O(n){O}(n)O(n) 的空间。
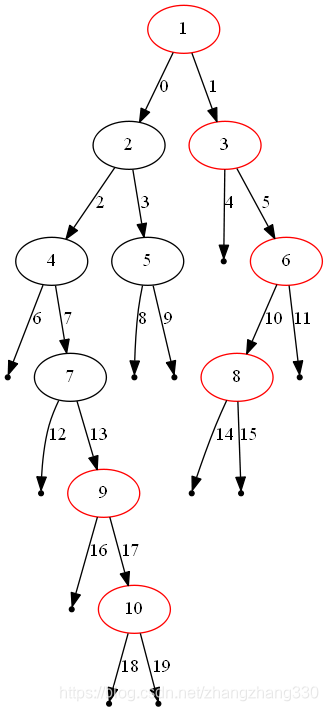
方法二:广度优先搜索BFS
用广度优先搜索实现二叉树的层次遍历。
执行广度优先搜索,左结点排在右结点之前,对每一层都从左到右访问。因此,只保留每个深度最后访问的结点,就可以在遍历完整棵树后得到每个深度最右的结点。简言之,相对于方法一,除了将栈改成队列,并去除了rightmost_value_at_depth之前的检查外,算法没有别的改动。
复杂度分析
时间复杂度 : O(n){O}(n)O(n)。 每个节点最多进队列一次,出队列一次,因此广度优先搜索的复杂度为线性。
空间复杂度 : O(n){O}(n)O(n)。每个节点最多进队列一次,所以队列长度最大不不超过 n,所以这里的空间代价为 O(n)O(n)O(n)。
代码
/**
* Definition for a binary tree node.
* struct TreeNode {
* int val;
* TreeNode *left;
* TreeNode *right;
* TreeNode(int x) : val(x), left(NULL), right(NULL) {}
* };
*/
class Solution {
public:
vector<int> rightSideView(TreeNode* root) {
unordered_map<int, int> rightmostValueDepth;
int maxDepth = -1;
/*
//方法一:DFS
stack<TreeNode*> nodeStack;
stack<int> depthStack;
nodeStack.push(root);
depthStack.push(0);
while(!nodeStack.empty()){
TreeNode* node = nodeStack.top();
nodeStack.pop();
int depth = depthStack.top();
depthStack.pop();
if(node != NULL){
maxDepth = max(maxDepth, depth);
if(rightmostValueDepth.find(depth) == rightmostValueDepth.end()){
rightmostValueDepth[depth] = node->val;
}
nodeStack.push(node->left);
nodeStack.push(node->right);
depthStack.push(depth + 1);
depthStack.push(depth + 1);
}
}
*/
// 方法二:BFS
queue<TreeNode*> nodeQueue;
queue<int> depthQueue;
nodeQueue.push(root);
depthQueue.push(0);
while(!nodeQueue.empty()){
TreeNode* node = nodeQueue.front();
nodeQueue.pop();
int depth = depthQueue.front();
depthQueue.pop();
if(node != NULL){
maxDepth = max(maxDepth,depth);
rightmostValueDepth[depth] = node->val;
nodeQueue.push(node->left);
nodeQueue.push(node->right);
depthQueue.push(depth + 1);
depthQueue.push(depth + 1);
}
}
vector<int> rightView;
for(int depth = 0; depth <= maxDepth; depth++){
rightView.push_back(rightmostValueDepth[depth]);
}
return rightView;
}
};
小结
深度/广度优先遍历图,时间/空间复杂度为线性时间。
一般步骤:
顶点出发⇒ 深度/广度优先遍历⇒ 回溯

















 147
147

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









