



MantisBT是一款常用的项目管理工具,整体偏缺陷管理,kanass是一款国产开源免费的项目管理工具,涵盖项目、项目集、产品、工时等功能模块。本文将从功能、用户体验、集成能力等方面对比二者,帮助团队选择合适的工具。
1、安装部署
|
对比项 | MantisBT |
kanass |
|---|---|---|
| 支持的操作系统种类 |
Linux、Docker、Windows、MacOs |
Linux、Docker、Windows、MacOs |
| 安装难度 |
|
|
| 配置难度 |
|
|
2、功能特性
| 模块 |
功能 | MantisBT |
kanass |
|---|---|---|---|
|
项目管理 | 内置多种项目模版 | × | ✔ |
| 项目关联产品 | ✔ | ✔ | |
| 项目状态 | ✔ | ✔ | |
| 项目进度 | ✔ | ✔ | |
| 项目成员与权限 | ✔ | ✔ | |
|
项目集管理 | 内置项目集模块 | × | ✔ |
| 项目集下创建项目 | × | ✔ | |
| 项目集关联已存在项目 | × | ✔ | |
| 项目集成员与权限 | × | ✔ | |
| 产品管理 |
产品下创建项目 | × | ✔ |
| 产品维护需求 | × | ✔ | |
|
产品同步项目需求 | × | ✔ | |
| 事项管理 | 内置多种事项类型 | × | ✔ |
| 内置工作流 | ✔ | ✔ | |
| 支持自定义事项类型 | × | ✔ | |
| 事项间关联 | ✔ | ✔ | |
| 事项关联文档 | × | ✔ | |
| 事项关联测试 | × | ✔ | |
| 事项进度 | × | ✔ | |
| 工时管理 |
工时的填报 | × | ✔ |
| 工时的统计 | × | ✔ | |
| 统计分析 |
项目/跨项目统计 | ✔ | ✔ |
| 项目集/跨项目集统计统计 | × | ✔ | |
| 事项统计 | ✔ | ✔ | |
| 系统设置 | 用户与组织架构 | ✔ 只支持用户 | ✔ |
| 权限 | ✔ | ✔ | |
| 消息 | ✔ | ✔ | |
| 操作日志 | ✔ | ✔ | |
| 系统备份与恢复 | ✔ | ✔ | |
| IP黑白名单 | × | ✔ |
- 项目管理页面
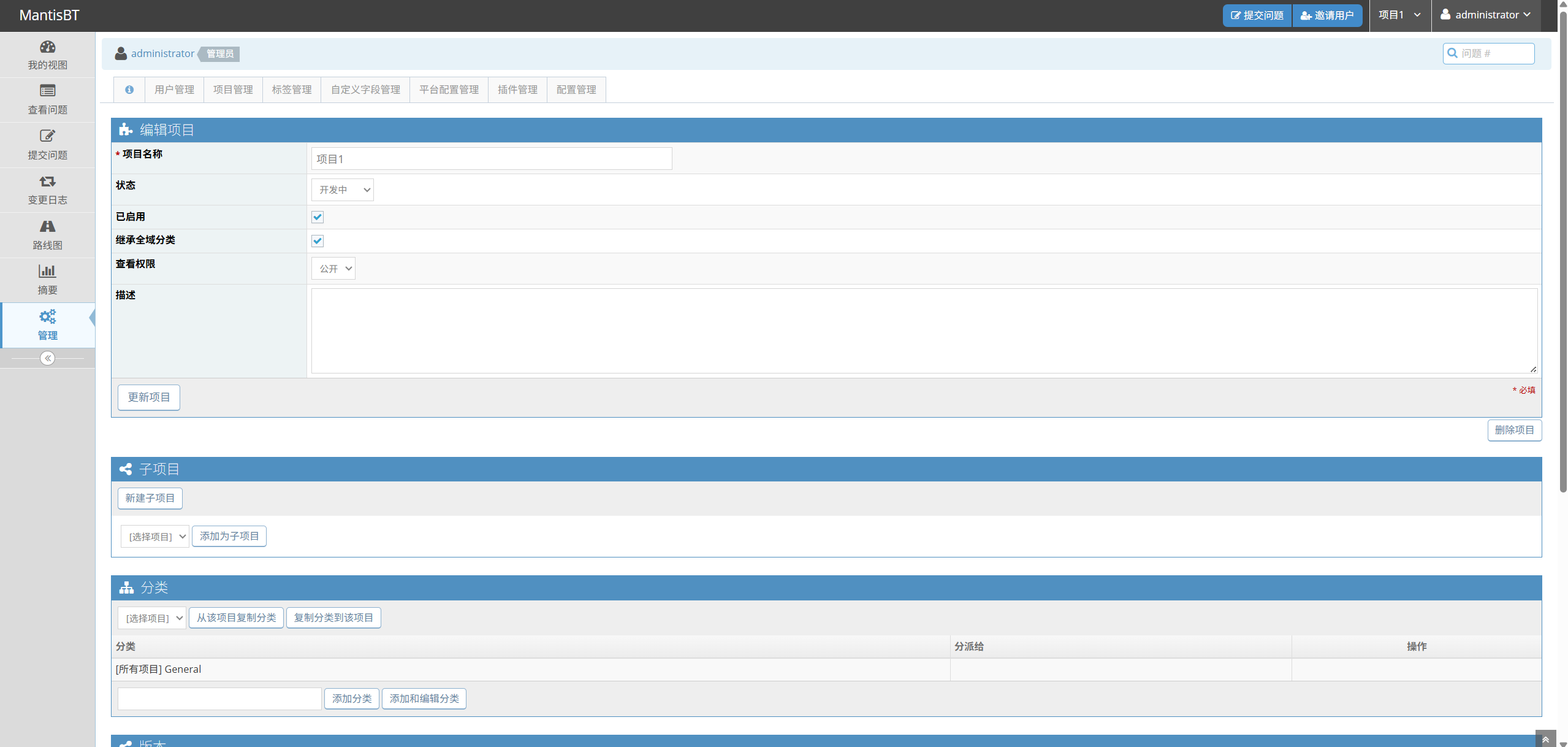 MantisBT
MantisBT
 kanass
kanass
- 查看bug页面
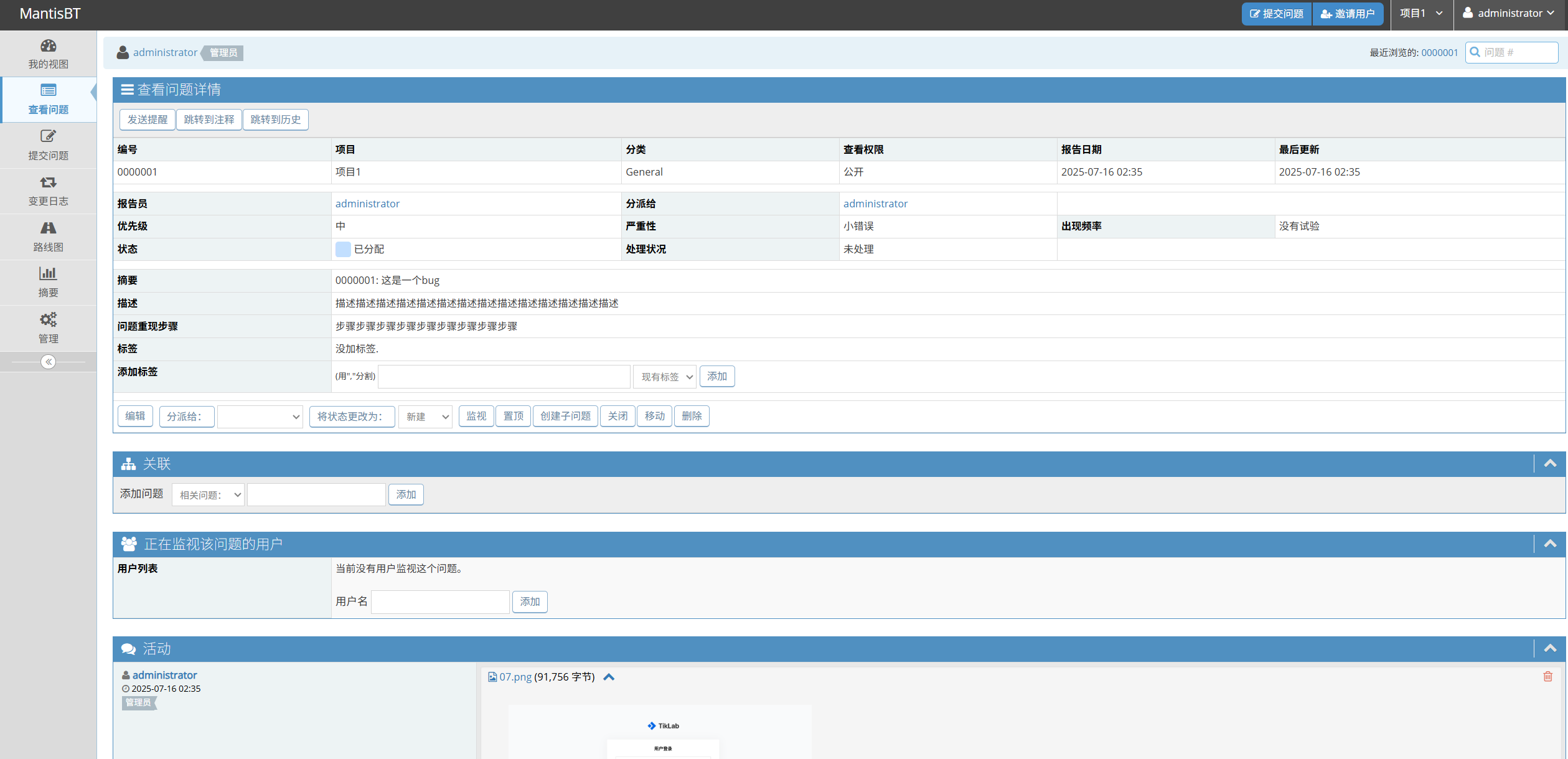 MantisBT
MantisBT
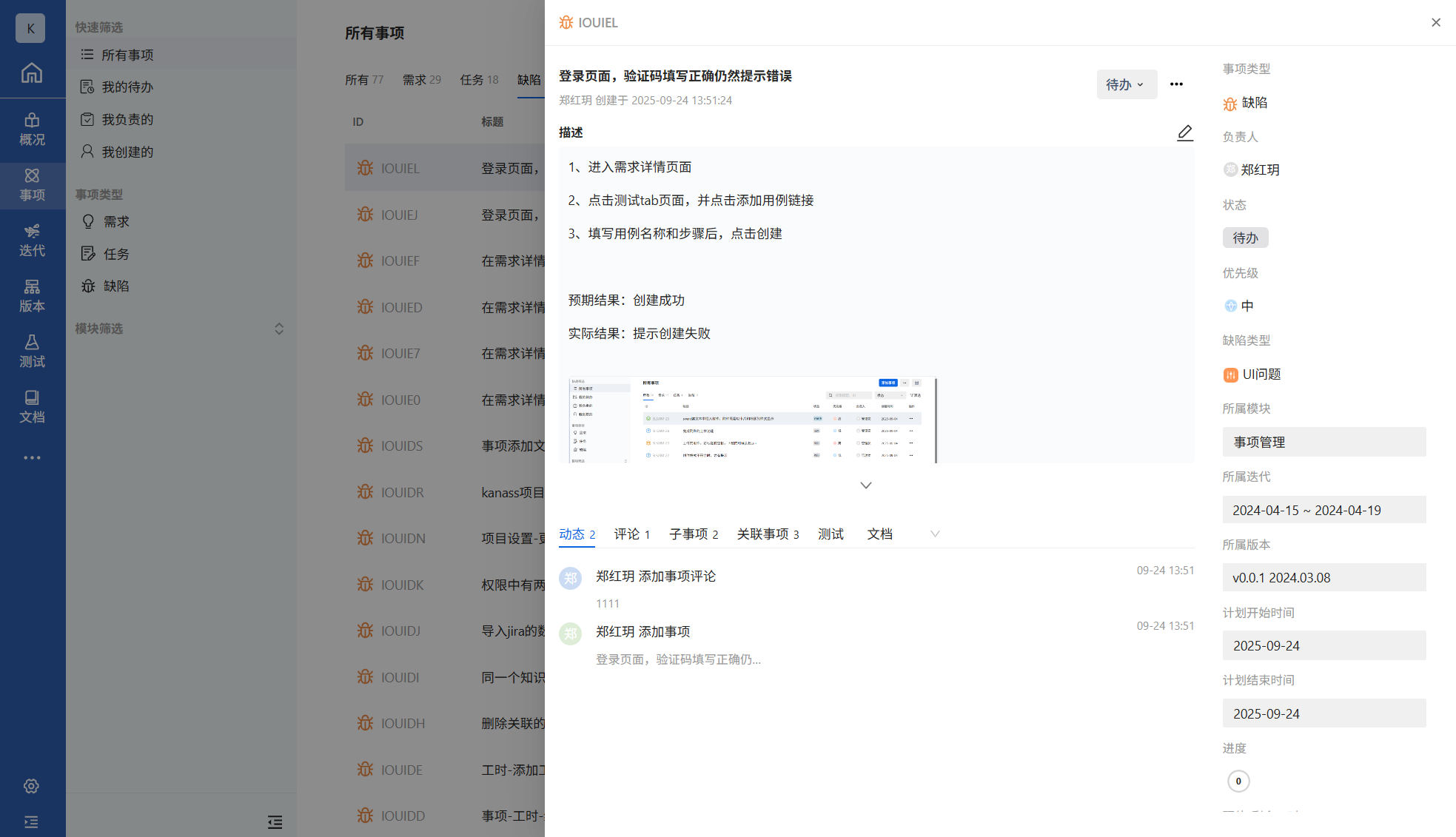 kanass
kanass
3、集成能力
| 集成能力 | MantisBT | kanass |
|---|---|---|
|
帐号体系 | ldap |
ldap/企业微信/钉钉 |
|
IM消息 | 企业微信/钉钉/邮件 | 企业微信/钉钉/邮件 |
| 导入其他平台数据 |
CSV/Excel 导入事项 | 支持导入jira、mantis的项目与事项 |
|
与文档集成 | 需通过插件或API | 与sward集成,可使事项与文档关联 |
| 与测试集成 | 需使用插件或API | 内置测试模块 |
|
openApi | 支持 | 支持 |
4、自定义能力
| 对比项 | MantisBT | kanass |
|---|---|---|
| 自定义角色 | 支持 | 支持 |
| 自定义仪表盘 | 支持 | 支持 |
| 自定义表单 | 支持 | 支持 |
| 自定义工作流 | 支持 | 支持 |
| 自定义事项类型 | 支持 | 支持 |
5、用户体验
| 对比项 | MantisBT | kanass |
|---|---|---|
| 安装配置 | 对新手有一定门槛 | 支持一键安装、0配置 |
| 上手难度 | 交互逻辑复杂、上手较难 | 交互逻辑简单,操作简洁,新手可以完全驾驭 |
| UI交互体验 | UI设计较陈旧,操作不直观 | 界面设计简单,符合国人审美与操作习惯 |
6、服务支持
| mantis |
|
| kanass |
|

















 674
674

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









