






添加FreeRTOS源码到工程中
在工程源码中创建FreeRTOS目录存放拷贝的文件
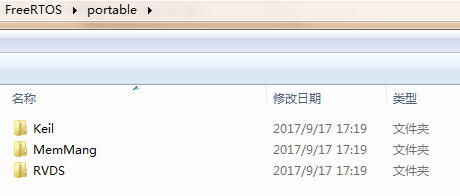
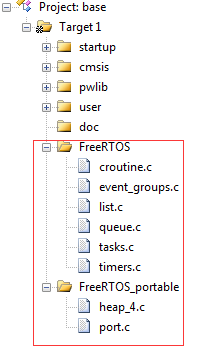
拷贝FreeRTOS->Source中的文件
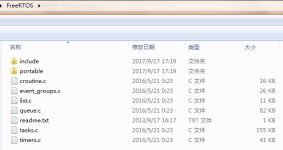
可将其他不需要的文件夹全部删掉,只留3个
拷贝Demo中FreeRTOSConfig.h配置文件
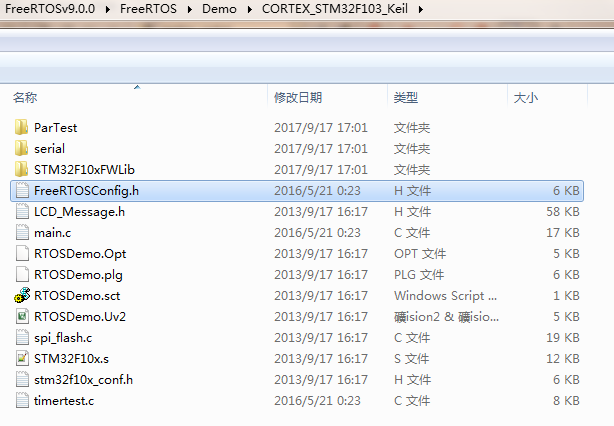
放在user目录下,不然编译报错。后续将对此文件详细介绍
添加到工程中,这里也采用heap_4.c内存管理方式
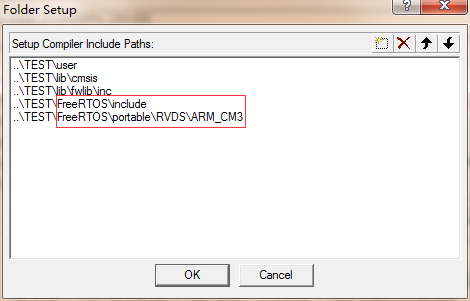
添加头文件路径
修改startup代码(必须)
STM32修改startup_stm32f10x_hd.s文件
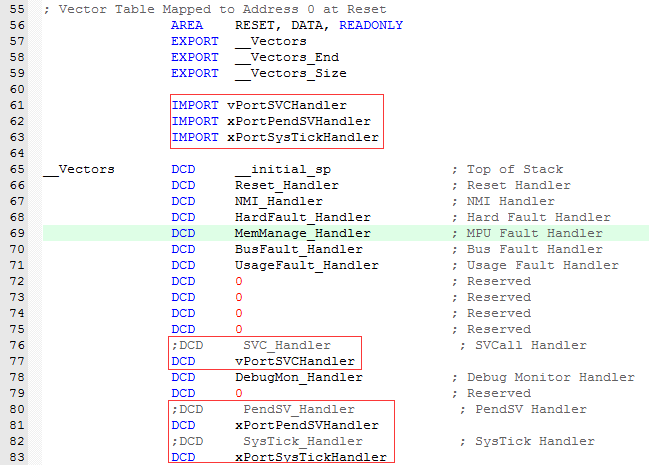
SVC_Handler -> vPortSVCHandler
PendSV_Handler-> xPortPendSVHandler
SysTick_Handler-> xPortSysTickHandler
添加测试代码
void vTask(void *t)
{
while(1)
{
uart1_send('t');
vTaskDelay(500);
}
}
int main(void)
{
xTaskCreate(vTask, "vTask", 50, NULL, 1, NULL); //创建任务
vTaskStartScheduler(); //开启调度器
while(1);
}

















 550
550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









