





专栏文章目录传送门:返回专栏目录![]()
Hi, 我是你们的老朋友,主要专注于嵌入式软件开发,有兴趣不要忘记点击关注【码思途远】

文章目录
目录
掌握perf 工具调试(二)
根据上一章节了解perf 工具的定义和用法,本章节将以实例进行去使用它,帮助在开发过程中去优化程序代码,让系统能够达到一个最优。
1. perf stat 整体性能分析
使用 perf stat 来获取程序的整体性能统计信息:
perf stat ./hywelstar_perf_demo
从这些统计信息中,我们可以得出以下结论:
-
程序的总运行时间为 13 秒。
-
CPU 利用率非常高(1.010 CPUs utilized)。
-
程序产生了 9831 次页面错误(page-faults),这可能是由于内存分配导致的。
-
每个周期执行了 0.85 条指令,说明存在一定的性能瓶颈。
2. perf record 详细分析
为了进一步定位性能瓶颈,我们使用 perf record 记录程序运行期间的详细性能数据:
perf record -g ./hywelstar_perf_demo然后使用 perf report 分析记录的数据:
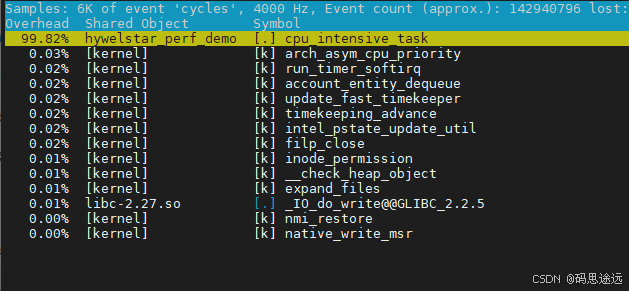
perf report
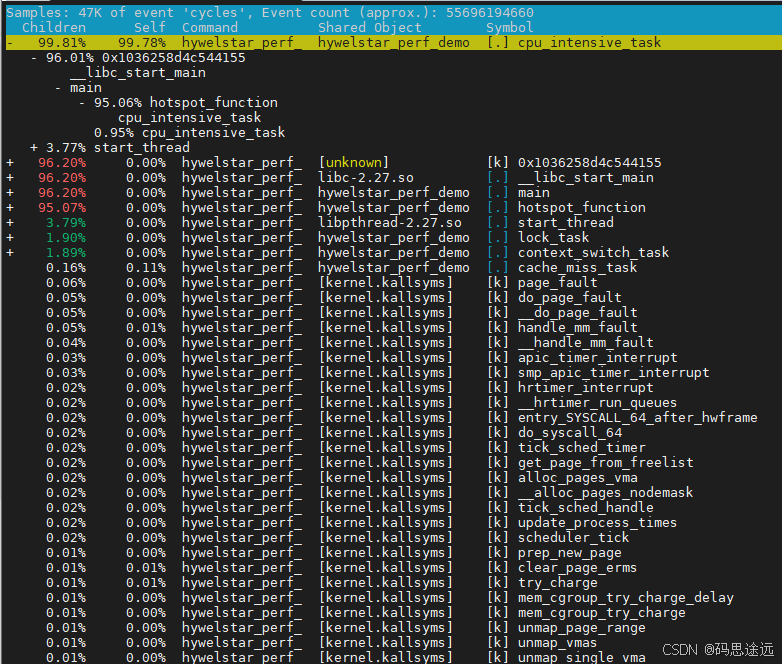
通过这个report 在 perf report 中,我们可以看到各个函数的运行时间分布,以及各个函数的调用关系。通过这个工具,我们可以找出哪些函数占用了大部分的CPU时间。 cpu_intensive_task, 原函数确实是在做一些耗时工作。这样就可以进行去优化。
3. 使用 perf annotate 查看热点代码
对于占用大量CPU时间的函数,可以使用 perf annotate 查看这些函数的具体代码执行情况。
perf annotate
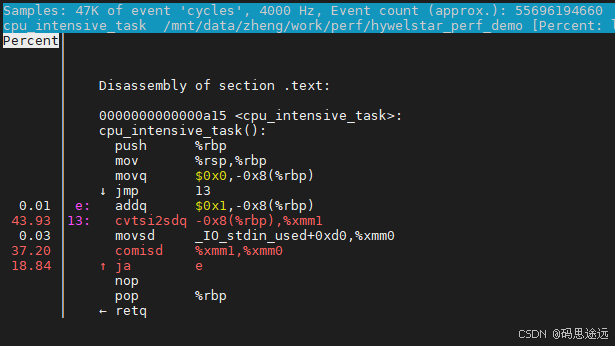
从图中将展现热点代码,左边是运行时间的比例,右边的对照的代码,可以通过方向上下移动,查看函数之间的关系。
4. 使用perf top 进行监控
开发过程中可以通过perf top进行实时的性能监控。
perf top -p <pid>
5. 总结
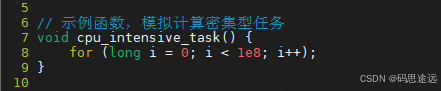
从上面这个例子查看,cpu_intensive_task 函数中,绝大部分时间消耗在以下几条指令上:
-
cvtsi2sdq指令:将整数转换为双精度浮点数。 -
comisd指令:比较两个双精度浮点数。
这种类型的任务是计算密集型的,优化方法包括:
-
减少不必要的浮点数转换:检查算法是否可以优化,减少或避免浮点数的使用。
-
并行化计算:如果可能,可以使用多线程或SIMD指令集来并行处理这些计算任务。
在实际开发过程中,优化也需要去查看自身的代码涉及性能相关的问题,一般来说通过perf 工具可以轻松的找到相关的问题,另外还可以通过生成火焰图进行更加直观得找到问题的位置。



















 2227
2227

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











