



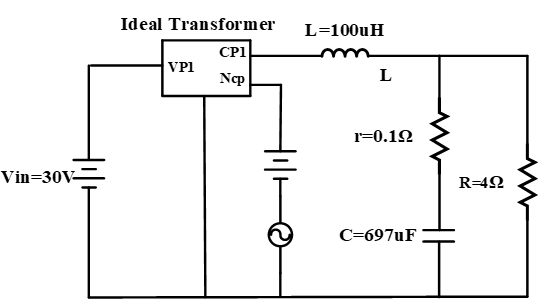
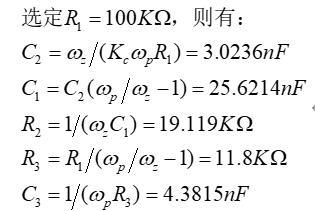
图1.Buck电路拓扑
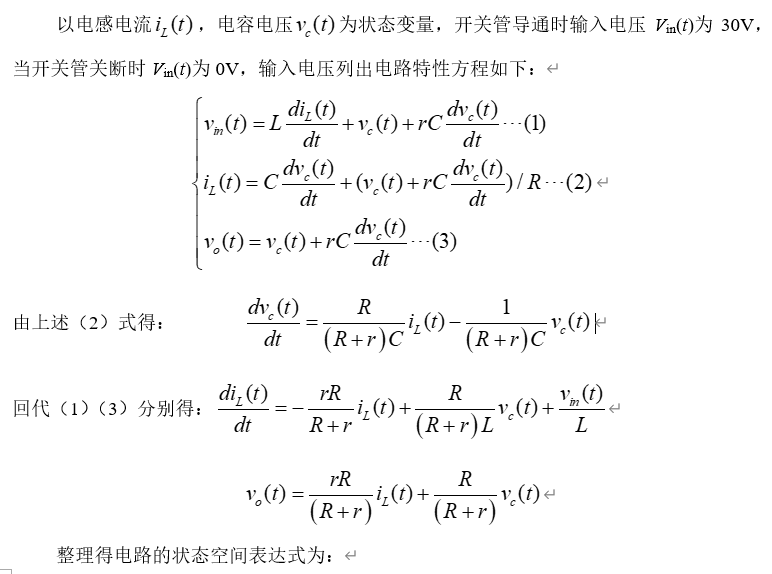
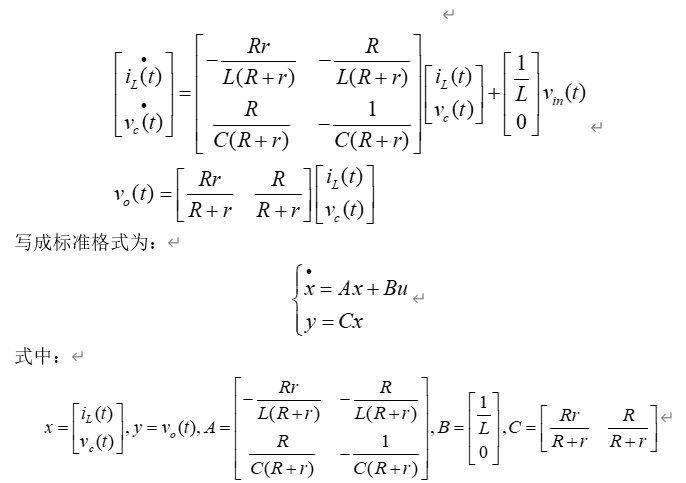
1.状态空间表达式
2.状态平均表达式
3.小信号动态模型
4.Gps(s)求解
5.Bode图绘制
由Gps传递函数编写M语言如下:
n = [3e4,4.3042e8];
d= [1,1358.6801,1.4372e7];
margin(n,d);grid on
用MATLAB画出其幅频与相频特性曲线如下图所示:
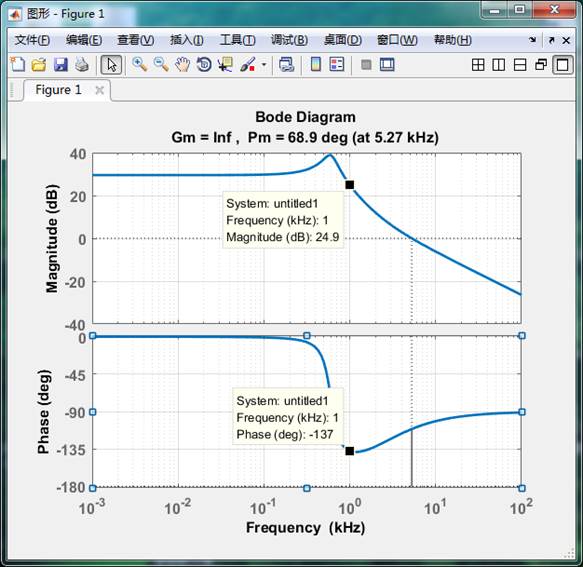
图2.小信号模型Gps幅频特性
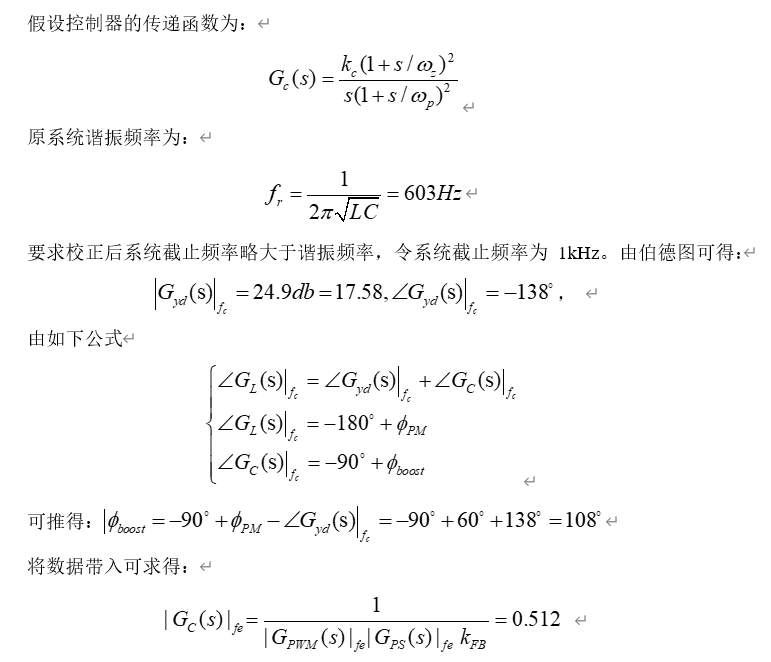
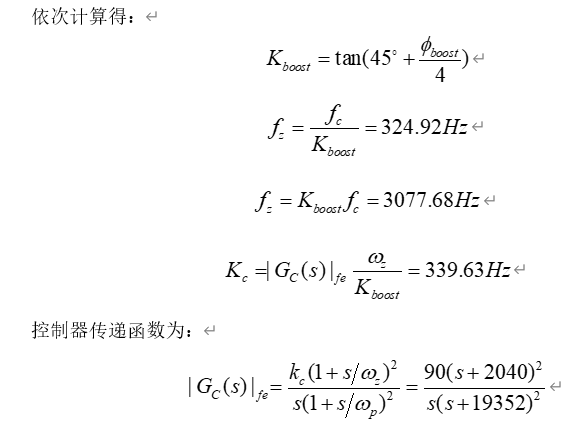
6.反馈控制器设计
(a)控制器传递函数求解:
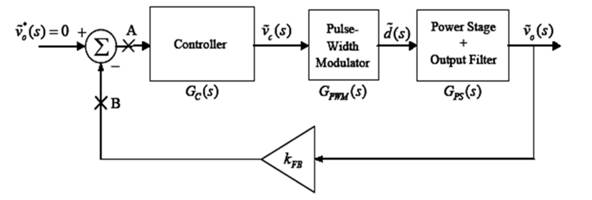
图3.小信号模型控制框图
(b)用运算放大器搭建控制器:
控制器电路如下,可在Psim中进行搭建仿真
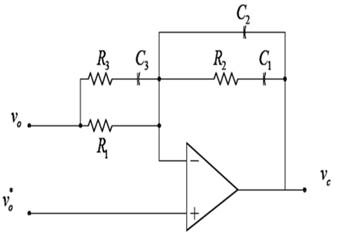
图4.控制器电路模块
7.建模仿真
分别在simulink和Psim中建立仿真模型,进行仿真分析对比,其中simulink中的控制器以传递函数进行表示,而Psim中则用运算放大器和电阻电容元件搭建传递函数,从而实现矫正功能。
(a)matlab建模仿真
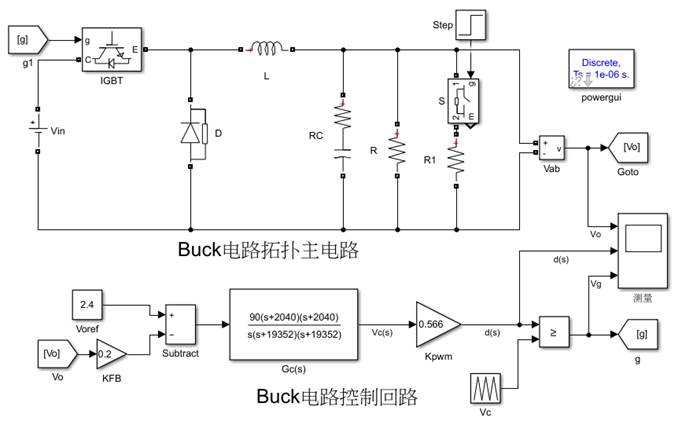
图5. Simulink仿真模型
仿真模型包括主电路和控制回路,其中主电路为Buck电路各参数如前所述,仿真总时长为3s,在2s时刻,突加负载,即输出电阻R两端并联一个10Ω的电阻R1。输出电压稳压在12V,经反馈系数与参考电压比较,通过反馈控制器矫正后与三角波比较得到占空比,从而调节开关管开通关断实现稳压。
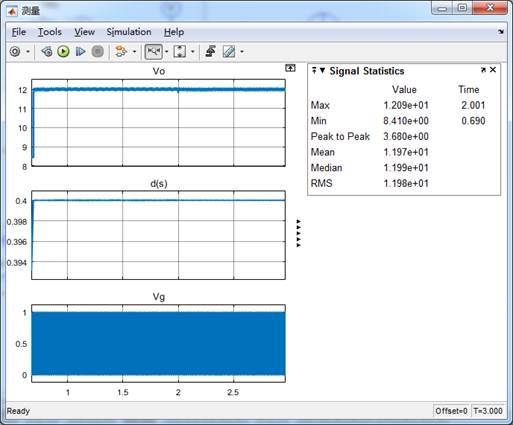
图6.Simulink仿真整体图
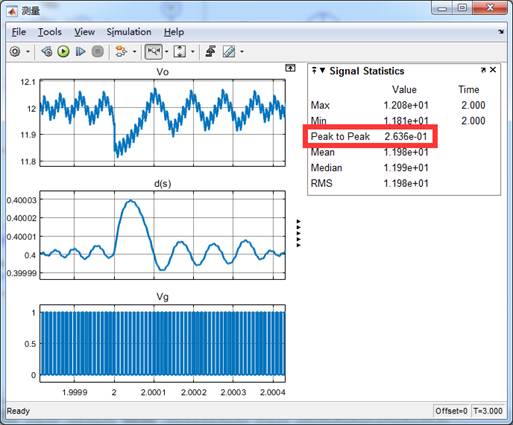
图7. Simulink仿真局部图
图中波形由上至下分别是输出电压,占空比和开关管驱动信号,由仿真结果可知,系统能较好的稳定在12V输出,开关管占空比稳定在0.4,当2s时,突加负载瞬间,误差低于0.26V,且在0.4ms内基本恢复稳定,说明系统动态及稳态性能均较好。
(b)Psim建模仿真
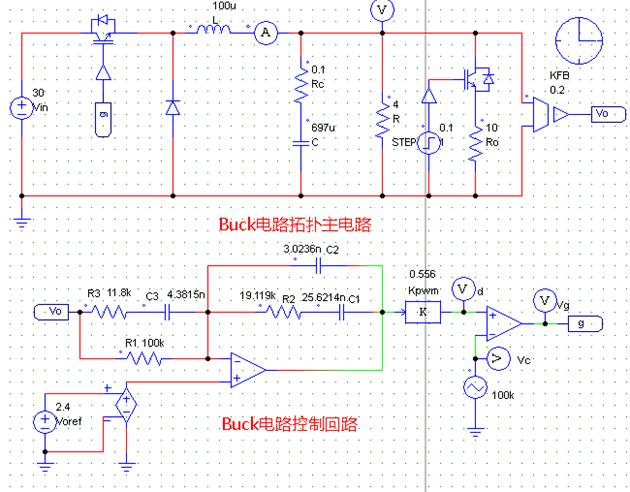
图8. Psim仿真模型
按前述计算结果搭建控制器如上图所示,仿真总时长0.2s,在0.1s处突加负载,输出并联一个10Ω电阻,仿真结果如下。此处仅用于理论仿真,对实际电路元器件参数选型具有一定指导意义。
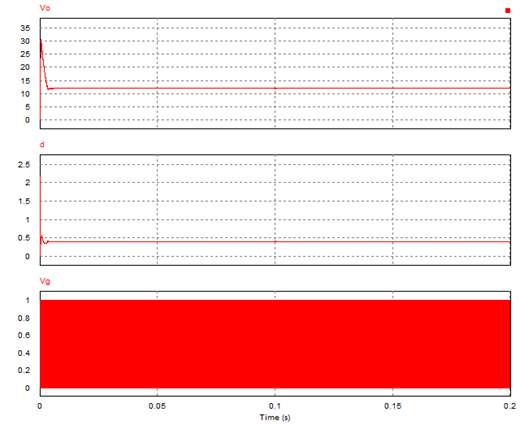
图9.Psim仿真整体图
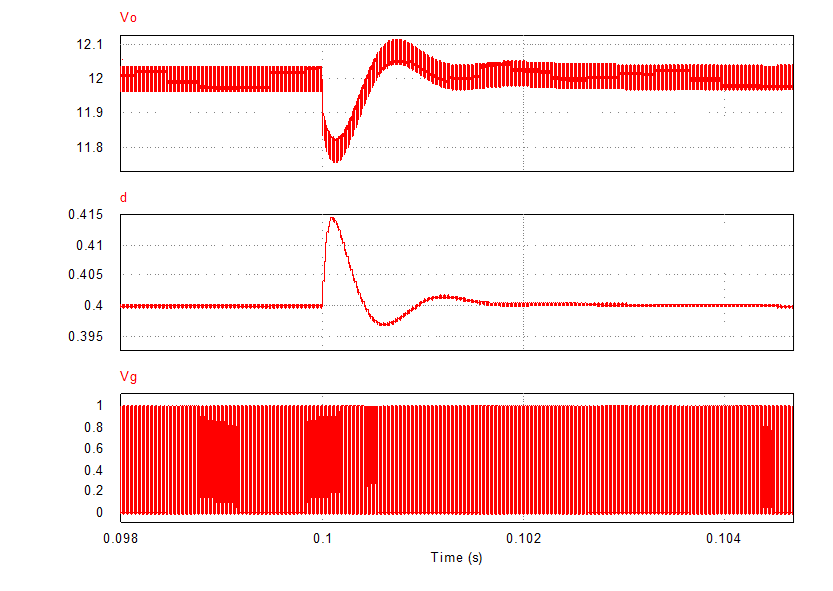
图10.Psim仿真局部图一
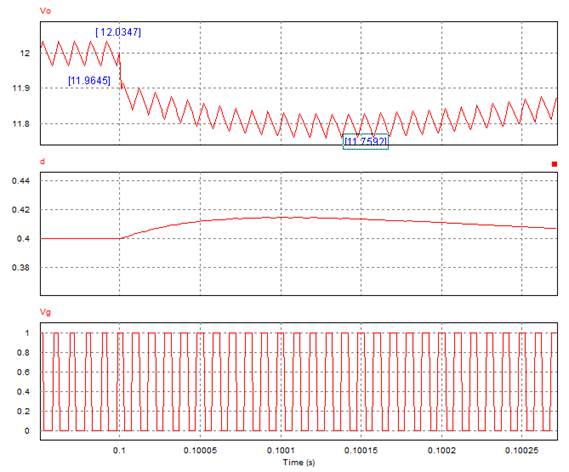
图11. Psim仿真局部图二
图中波形由上至下分别是输出电压,占空比和开关管驱动信号,由仿真结果可知,系统能较好的稳定在12V输出,开关管占空比稳定在0.4,当0.1s时,突加负载瞬间,误差低于0.276V,且在0.4ms内基本恢复稳定,(与Simulink仿真结果一致)说明系统动态及稳态性能均较好。
负载突变瞬间电压略微跌落
现象:对比分析simulink和psim模型发现,无论是用传递函数作为控制器还是用运放搭建控制器,在负载突增时,均会发现电压有一个微小的跌落,由图11Vo波形数据可知电压跌落约为11.759V。
分析:因为负载突增前,负载电阻为4Ω,输出电压稳态为12V,稳态电容电压计算得,当负载突增瞬间,电容电压保持不变,外电阻并联一个10Ω电阻后减小为,分压减小,所以负载突变瞬间,外电阻端电压即输出电压,与仿真测量结果11.759V近似相等。
8.总结
首先根据开关管不同导通状态,分析电路导通情况,根据KVL,KCL列写各状态下的电路微分方程,整理成标准形式,并求出平均状态模型,在此基础上推导出小信号动态模型,求解对应传递函数及其幅频特性,根据系统设计要求,选定控制器形式及反馈系数等,并计算控制器传递函数(可根据传递函数用电路搭建控制器),之后搭建仿真模型进行验证,通过加入扰动,分析验证设计的控制系统的动态特性及稳态特性。

















 5429
5429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









