





import cv2 as cv
import numpy as np
def measure_object(image):
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
# 将输入图像转换为灰度图
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)
# 使用Otsu阈值法将灰度图转换为二值图。
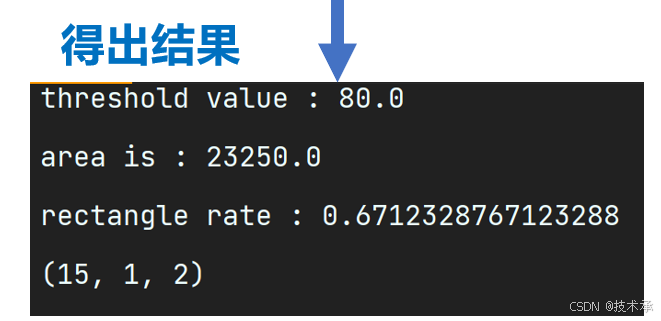
print("threshold value : %s" % ret) # 打印出计算出的阈值
cv.imshow("binary image", binary) # 显示二值图。
dst = cv.cvtColor(binary, cv.COLOR_GRAY2BGR) # 将二值图转换回BGR格式,以便在其上绘制彩色图形。
contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE) # 检测二值图中的轮廓。
Area = []
for i, contour in enumerate(contours):
area = cv.contourArea(contour) # 轮廓的面积
Area.append(area)
print("area is : %s" % area)
if area > 0: # 确保轮廓面积大于0
x, y, w, h = cv.boundingRect(contour) # 轮廓的外接矩形
rate = min(w, h) / max(w, h) # 轮廓外接矩形的宽高比
print("rectangle rate : %s" % rate)
mm = cv.moments(contour) # 求轮廓的几何矩
# print(type(mm))#字典型数据
if mm['m00'] != 0: # 确保零阶矩不为0
cx = mm['m10'] / mm['m00'] # 原点的零阶矩
cy = mm['m01'] / mm['m00']
cv.circle(dst, (int(cx), int(cy)), 3, (0, 0, 255), -1) ##画出中心点,-1表示填充
# cv.rectangle(dst, (x, y), (x+w, y+h), (0, 0, 255), 2)#绘制轮廓的外接矩形
approxCurve = cv.approxPolyDP(contour, 4, True) # 多边形逼近 4是与阈值的间隔大小,越小越易找出,True是是否找闭合图像
else:
print("Contour area is zero or contour is empty.")
else:
print("Contour area is zero or contour is empty.")
"""
cv.contourArea(contour) #获取每个轮廓面积
cv.boundingRect(contour) #获取轮廓的外接矩形
cv.moments(contour) #求取轮廓的几何距
cv.arcLength(contour,True) #求取轮廓的周长,指定闭合
approxPolyDP(curve, epsilon, closed, approxCurve=None)
第一个参数curve:输入的点集,直接使用轮廓点集contour
第二个参数epsilon:指定的精度,也即是原始曲线与近似曲线之间的最大距离。
第三个参数closed:若为true,则说明近似曲线是闭合的,反之,若为false,则断开。
第四个参数approxCurve:输出的点集,当前点集是能最小包容指定点集的。画出来即是一个多边形;
print(approxCurve) #打印每个轮廓的特征点
print(approxCurve.shape) #打印该点集的shape,第一个数是代表了点的个数,也就是边长连接逼近数
"""
print(approxCurve.shape)
if approxCurve.shape[0] > 6:
cv.drawContours(dst, contours, i, (0, 255, 0), 2)
if approxCurve.shape[0] == 4:
cv.drawContours(dst, contours, i, (0, 0, 255), 2)
if approxCurve.shape[0] == 3:
cv.drawContours(dst, contours, i, (255, 0, 0), 2)
print("area max is : %s" % max(Area))
cv.imshow("measure-contours", dst)
src = cv.imread("D:\img\imagetest5.jpg")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
measure_object(src)
cv.waitKey(0)
cv.destroyAllWindows()
函数解释:cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])
函数原型
cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])
参数:
image:输入图像,通常是一个二值图像。
mode:轮廓检索模式。它可以是以下值之一:
cv2.RETR_EXTERNAL:只检索最外层的轮廓。
cv2.RETR_LIST:检索所有轮廓,并以列表形式返回。
cv2.RETR_CCOMP:检索所有轮廓,并以树状结构(contour hierarchy)形式返回。此时,轮廓被分为不同的层级。
cv2.RETR_TREE:检索所有轮廓,并以完整的树状结构形式返回。
method:轮廓近似方法。它可以是以下值之一:
cv2.CHAIN_APPROX_NONE:存储轮廓上的所有点。
cv2.CHAIN_APPROX_SIMPLE:压缩水平、垂直和对角方向的轮廓点。
cv2.CHAIN_APPROX_TC89_L1 和 cv2.CHAIN_APPROX_TC89_KCOS:使用L1和KOS链逼近算法。
contours(可选):输出参数,返回检测到的轮廓。
hierarchy(可选):输出参数,返回轮廓的层次结构。它是一个多通道多维数组,其中每个轮廓由三个数组组成:[next, previous, first_contour]。其中,“next”是下一个轮廓的索引,“previous”是上一个轮廓的索引,“first_contour”是起始轮廓的索引。
offset(可选):偏移量,指定从哪里开始搜索轮廓。例如,如果指定了(10, 10),则从图像的(10, 10)位置开始搜索轮廓。
返回值:
如果指定了contours参数,则此函数返回被检测到的第一个轮廓的索引;否则,不返回任何内容。
cv2.drawContours() cv2.drawContours 是 OpenCV 中的一个函数,用于在图像上绘制轮廓。以下是该函数的详细解释和参数说明:
函数原型:
cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy ]]])
参数:
image:输入/输出图像。你可以提供一个初始图像(用于绘制轮廓)或提供一个空图像(将返回绘制好的轮廓图像)。
contours:输入轮廓的列表。通常,这是通过 cv2.findContours 函数获得的轮廓列表。
contourIdx:要绘制的轮廓的索引。如果要绘制所有轮廓,则将其设置为-1。
color:轮廓的颜色。通常使用 BGR 格式,例如 (255, 0, 0) 表示蓝色。
thickness(可选):线条的厚度。如果为负数(如 -1),则会填充轮廓内部。
lineType(可选):线条类型,可以是 cv2.LINE_8, cv2.LINE_4, 或 cv2.LINE_AA。
hierarchy(可选):轮廓的层次结构信息,通常与 cv2.findContours 一起使用。
计算面积cv2.contourArea()
函数原型:
cv2.contourArea(contour[, oriented_area])
参数:
contour:这是一个轮廓的点集,通常通过 cv2.findContours() 函数获得。
oriented_area(可选):如果提供了这个参数,它返回有方向的面积。0表示顺时针方向,正数表示逆时针方向。
返回值:
返回轮廓的面积。




















 到【灌水乐园】发言
到【灌水乐园】发言








