深度学习03-(图像梯度处理、图像轮廓、图像预处理在AI中的应用)
最新推荐文章于 2025-04-18 21:58:56 发布





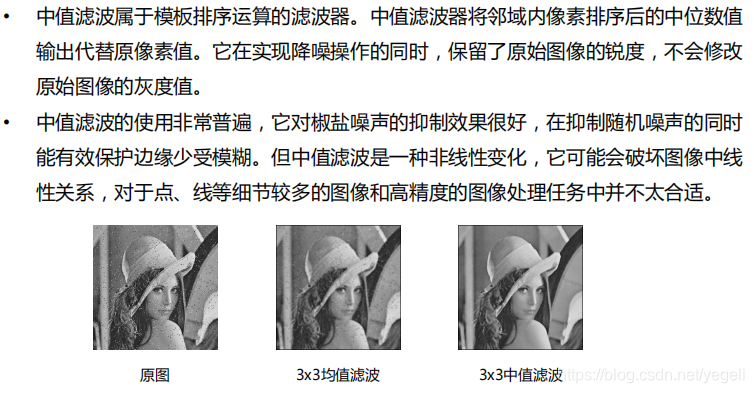
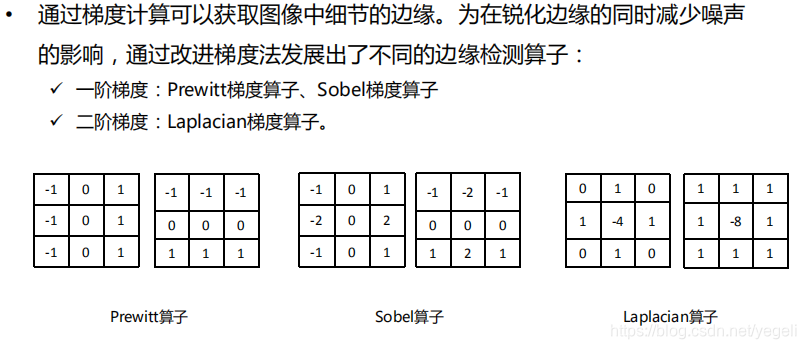
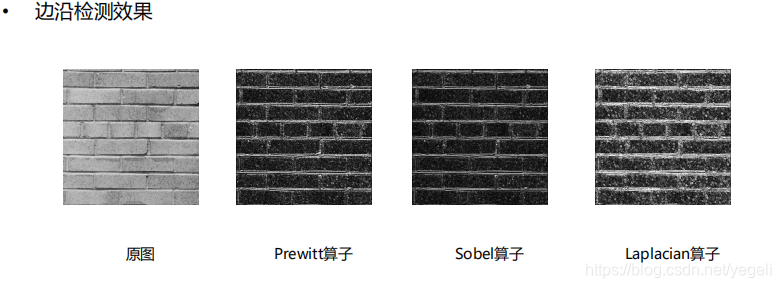
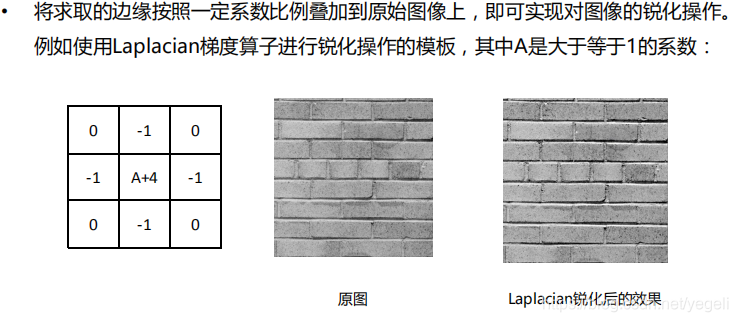
 本文深入探讨了深度学习在计算机视觉中的应用,包括图像梯度处理、边沿检测、锐化、图像轮廓检测等关键技术。通过实例展示了图像预处理、数据增强及纯图像技术的局限性。
本文深入探讨了深度学习在计算机视觉中的应用,包括图像梯度处理、边沿检测、锐化、图像轮廓检测等关键技术。通过实例展示了图像预处理、数据增强及纯图像技术的局限性。
本文深入探讨了深度学习在计算机视觉中的应用,包括图像梯度处理、边沿检测、锐化、图像轮廓检测等关键技术。通过实例展示了图像预处理、数据增强及纯图像技术的局限性。
本文深入探讨了深度学习在计算机视觉中的应用,包括图像梯度处理、边沿检测、锐化、图像轮廓检测等关键技术。通过实例展示了图像预处理、数据增强及纯图像技术的局限性。
 2937
855
1621
2937
855
1621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言







 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























