






 本文详细介绍了如何使用ABAQUS软件进行汽车控制臂的拓扑优化,包括创建几何模型、设置材料属性、装配、创建分析步骤、设定优化目标和约束,以及监控优化进度和后处理过程。
本文详细介绍了如何使用ABAQUS软件进行汽车控制臂的拓扑优化,包括创建几何模型、设置材料属性、装配、创建分析步骤、设定优化目标和约束,以及监控优化进度和后处理过程。
前言
本示例详细讲解使用abaqus实现汽车控制臂的拓扑优化的操作过程。
本页讨论
一、创建模型
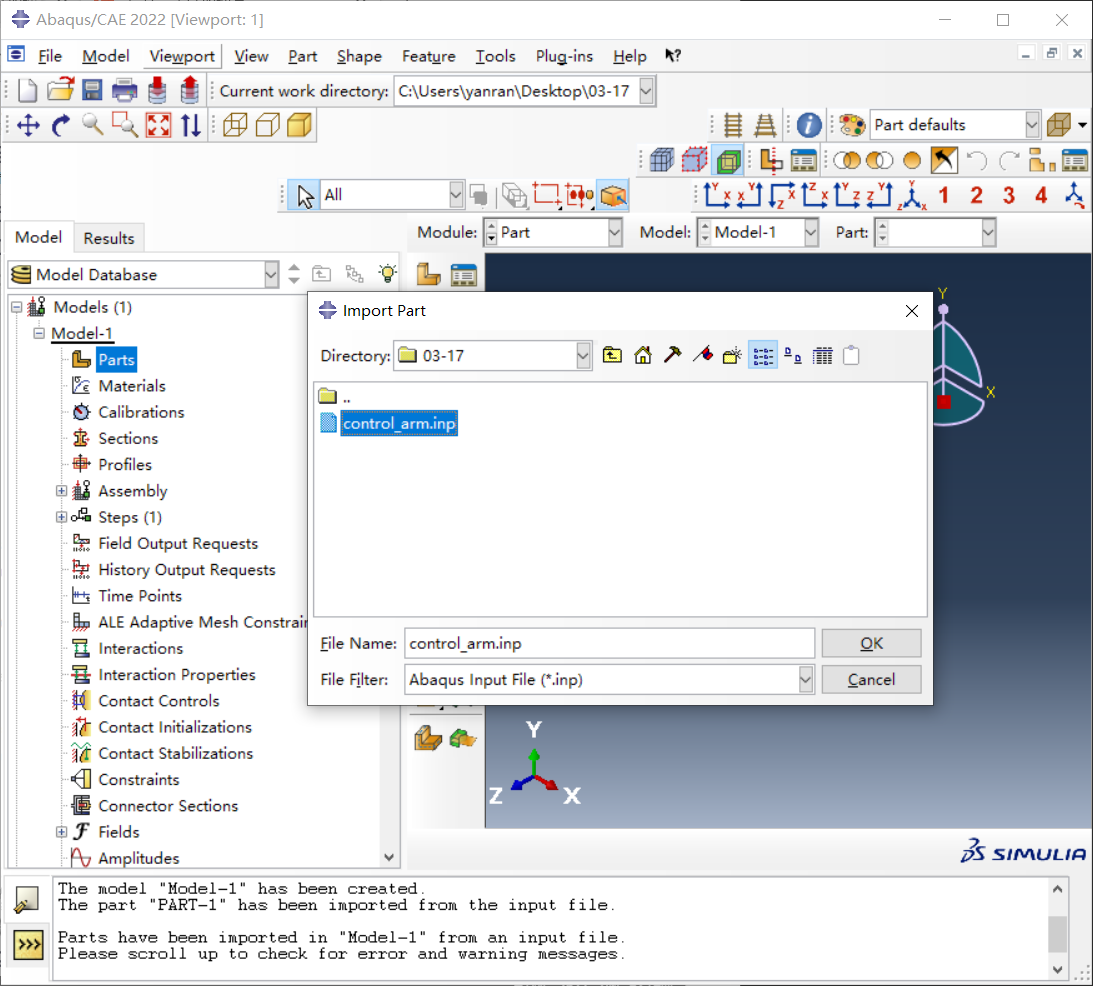
1.创建几何部件
- 几何形状
在PART模块,导入控制臂孤立网格部件:一个用二次四面体(C3D10)单元进行网格划分的单个孤立网格零件,控制臂关于X–Y平面对称,只需要研究模型的一半。
2.定义材料属性
在PROPERTY模块,创建STEEL材料:杨氏模量为210GPa、泊松比为0.3的弹性材料。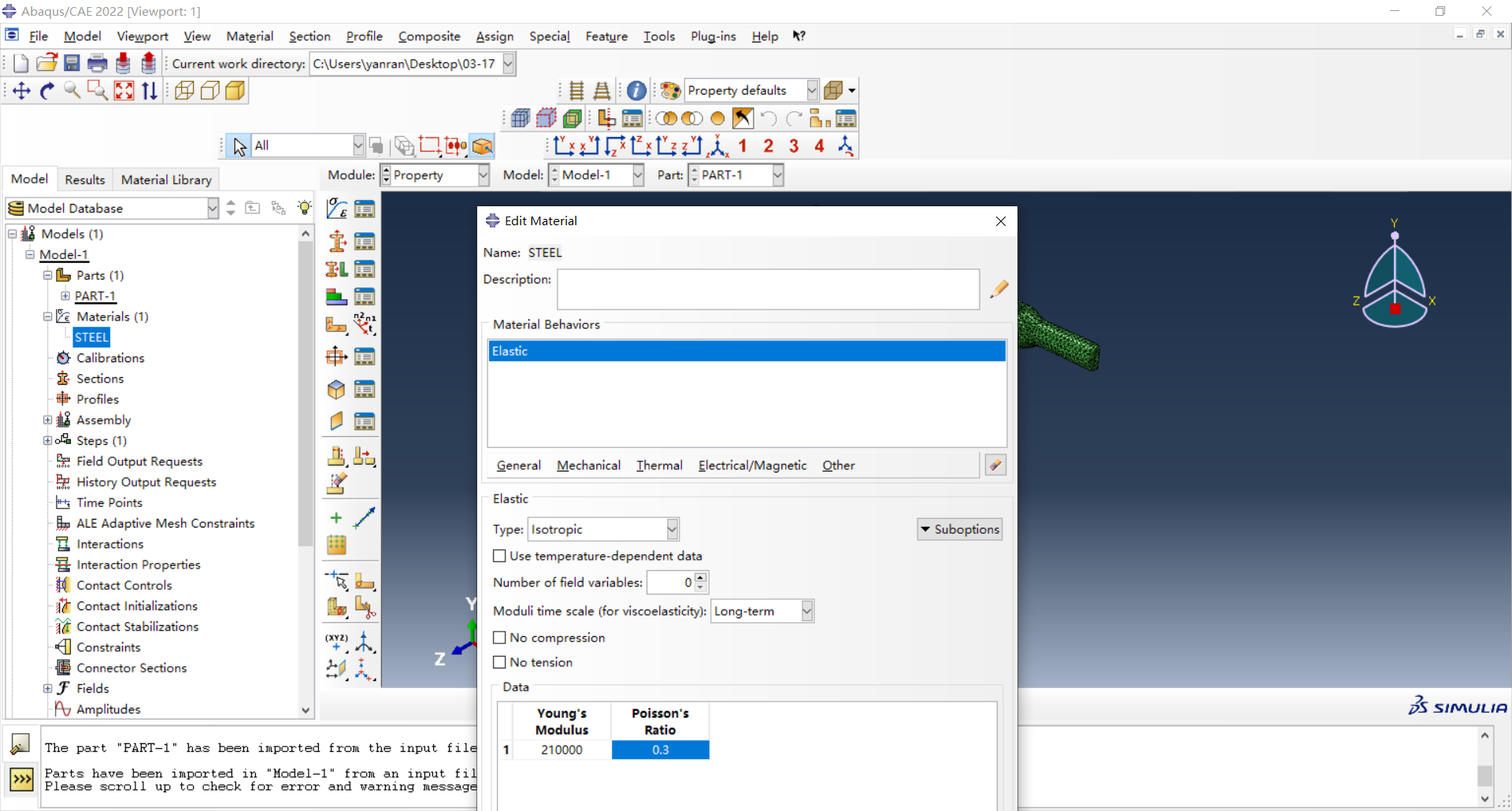
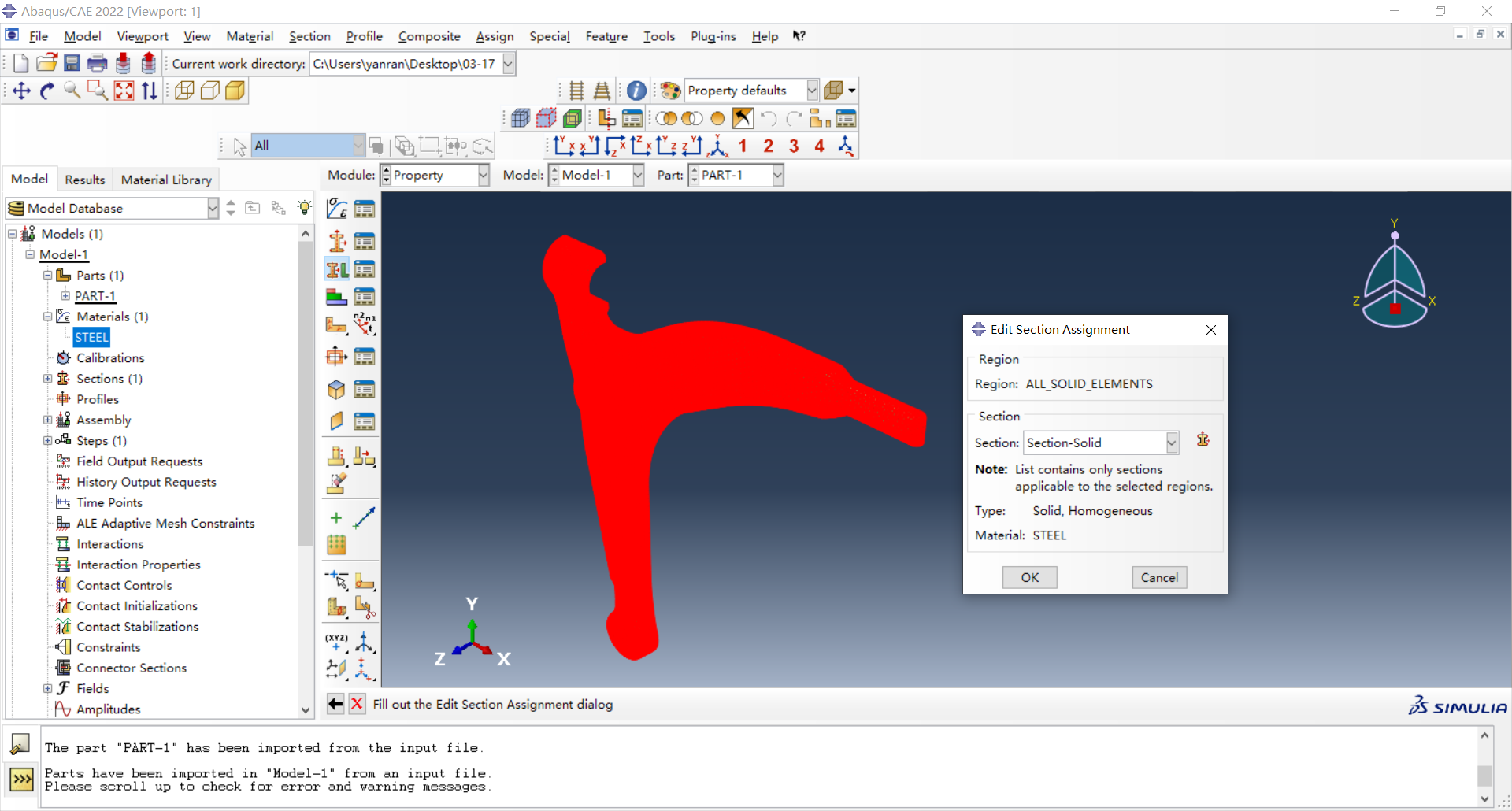
创建Section_Solid截面:实体,均质,材料:STEEL。

指派截面:将Section_Solid截面赋予整个实体零件。
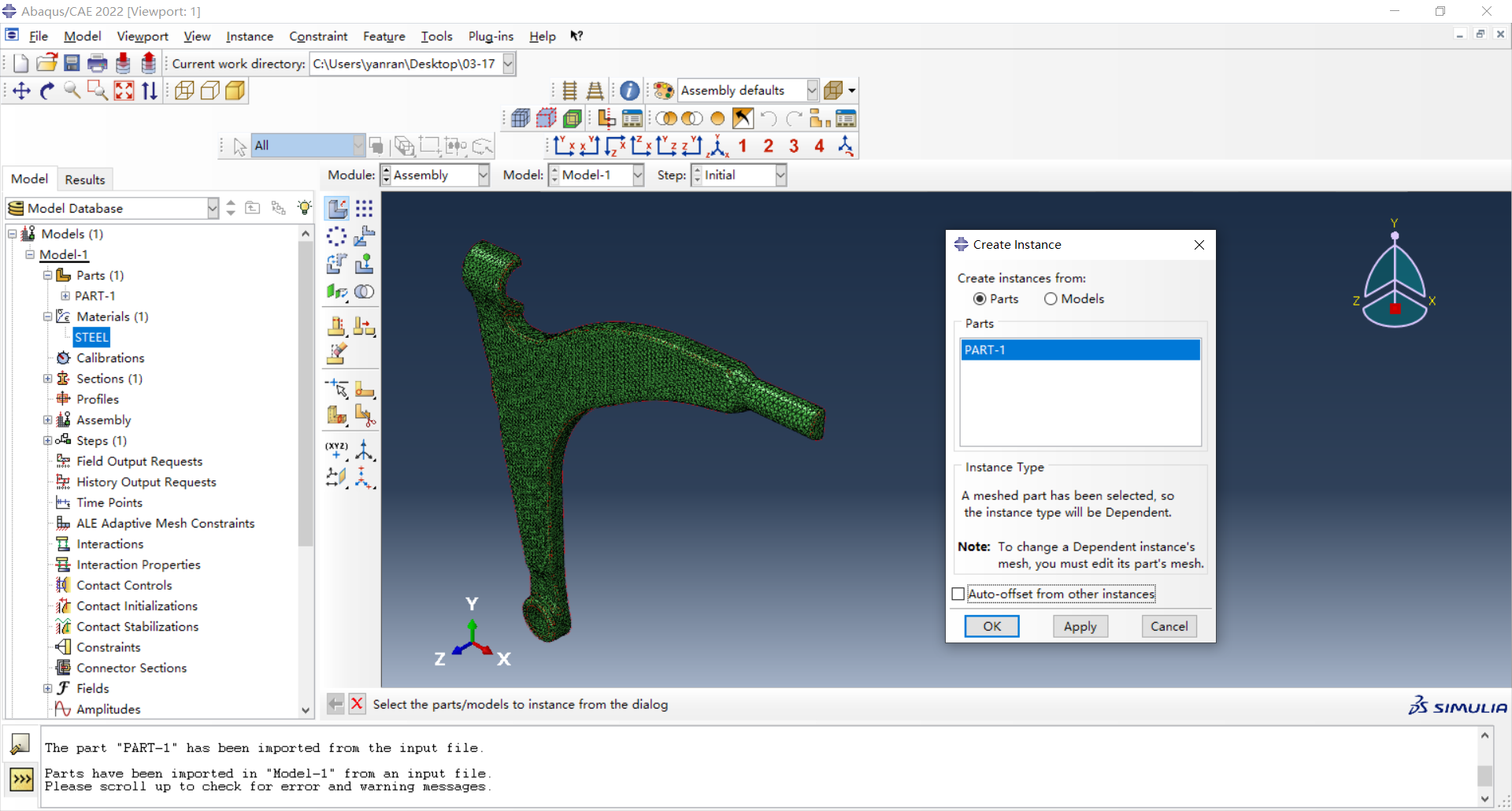
3.创建装配实体
在ASSEMBLY模块,创建实例。
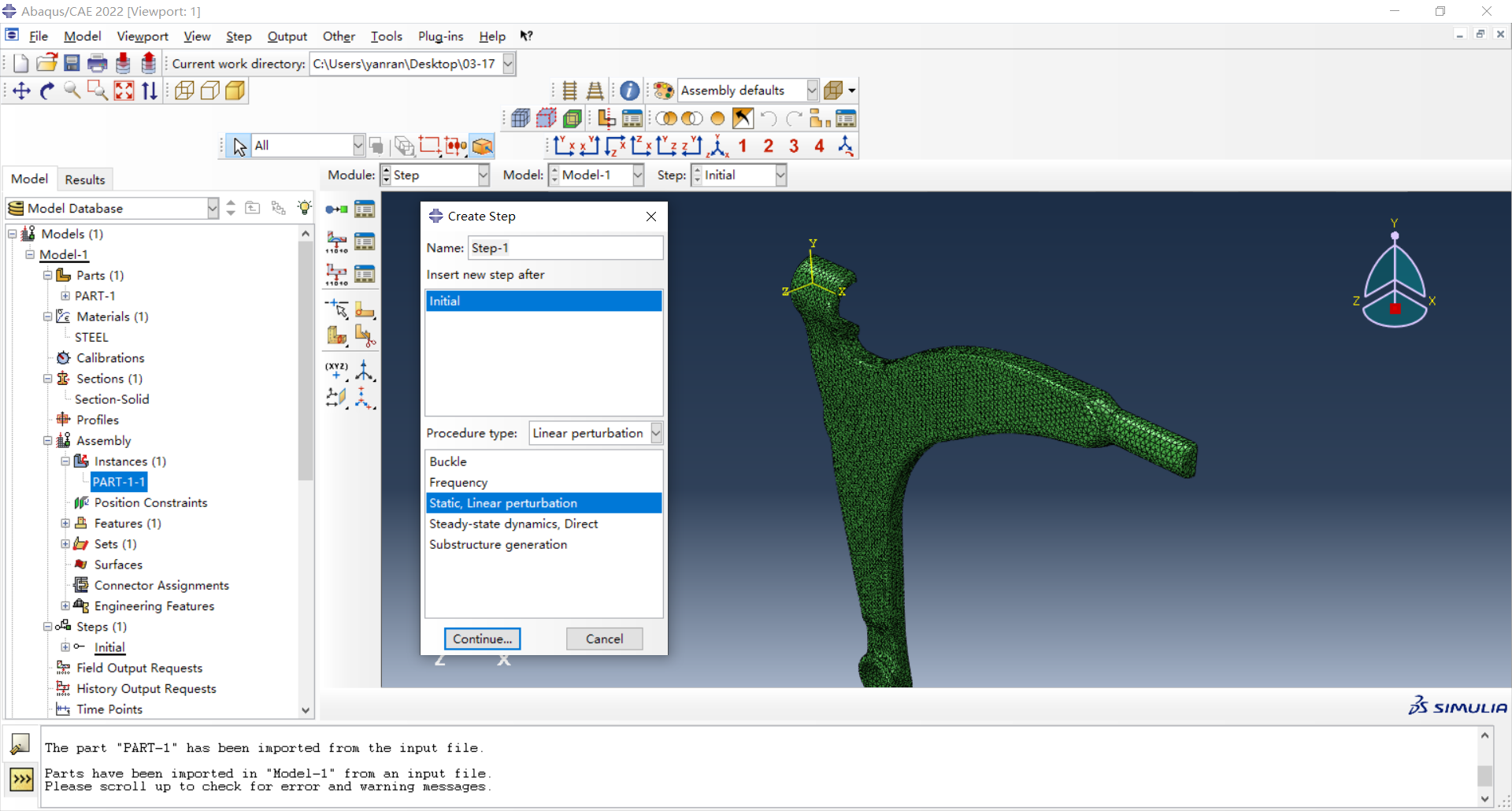
4.创建分析步
在STEP模块,创建线性,摄动分析步。
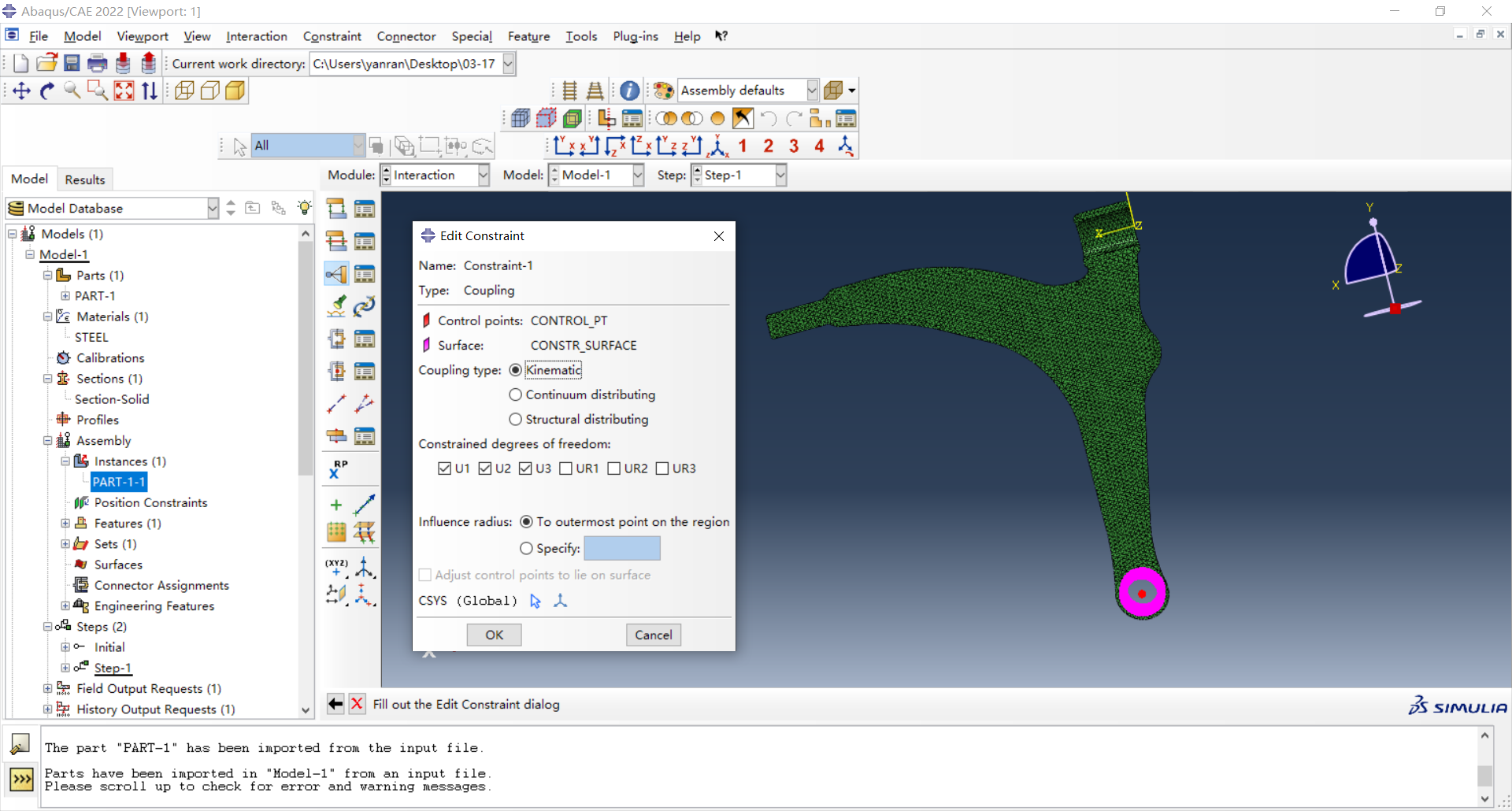
5.创建相互作用
在INTERACTION模块,创建运动耦合约束:将面上(从属)节点集合的运动与参考节点的运动耦合。
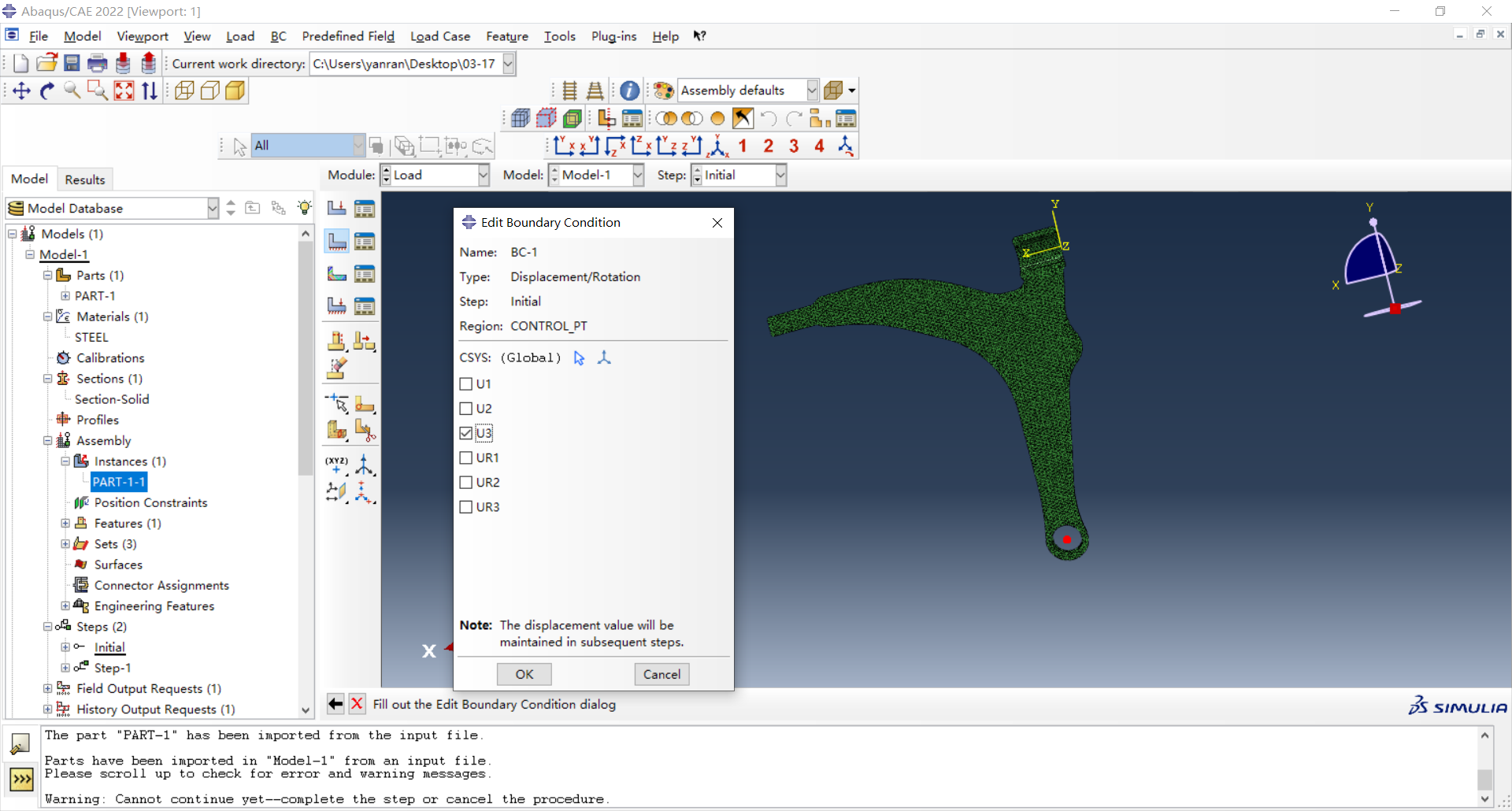
6.创建边界条件及载荷
创建边界条件1:控制点固定在XY平面上,U3=0。
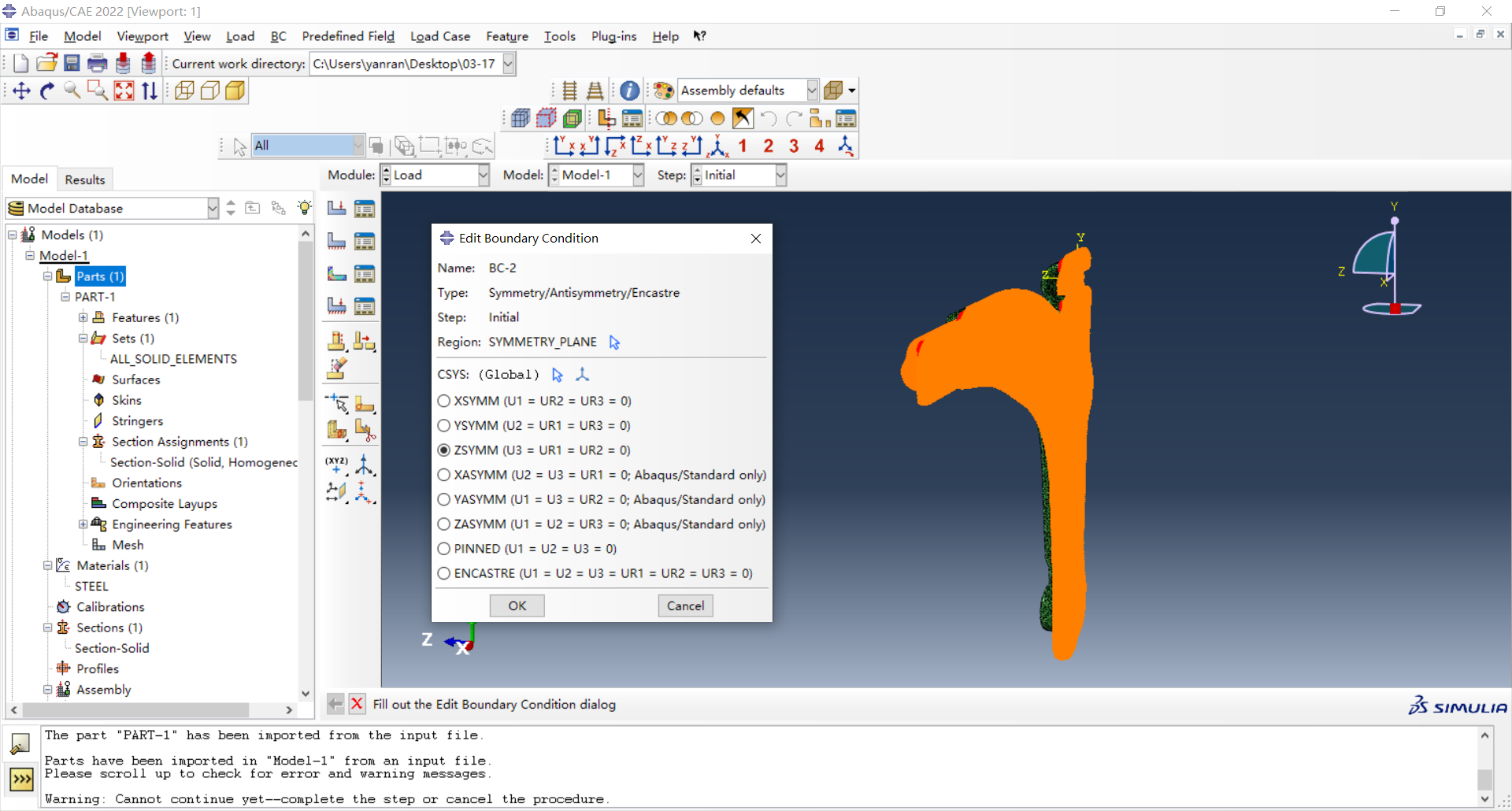
创建边界条件2:零件关于Z轴对称,U3=UR1=UR2=0。
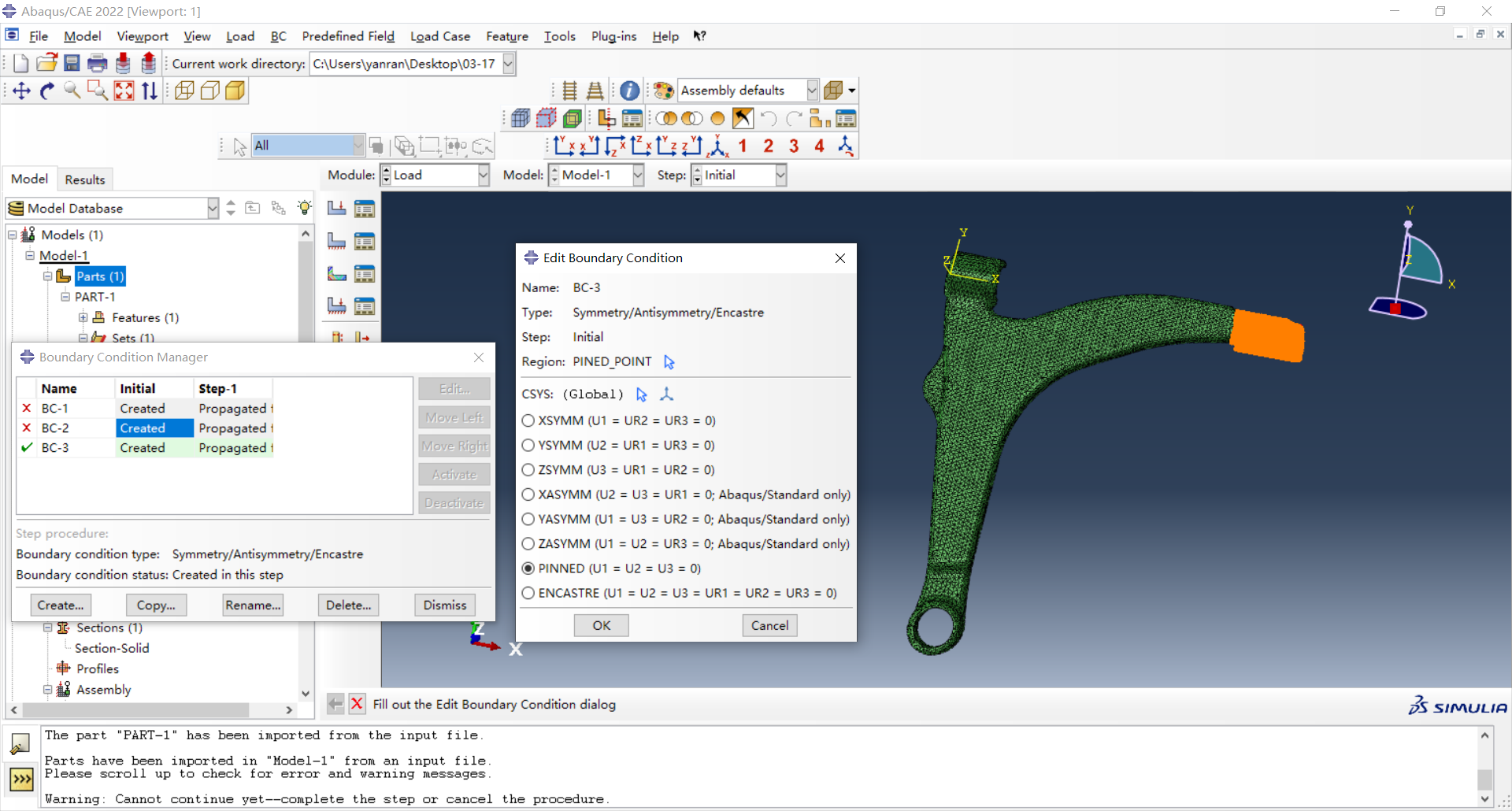
创建边界条件3:轴限制为铰链约束,U1=U2=U3=0。
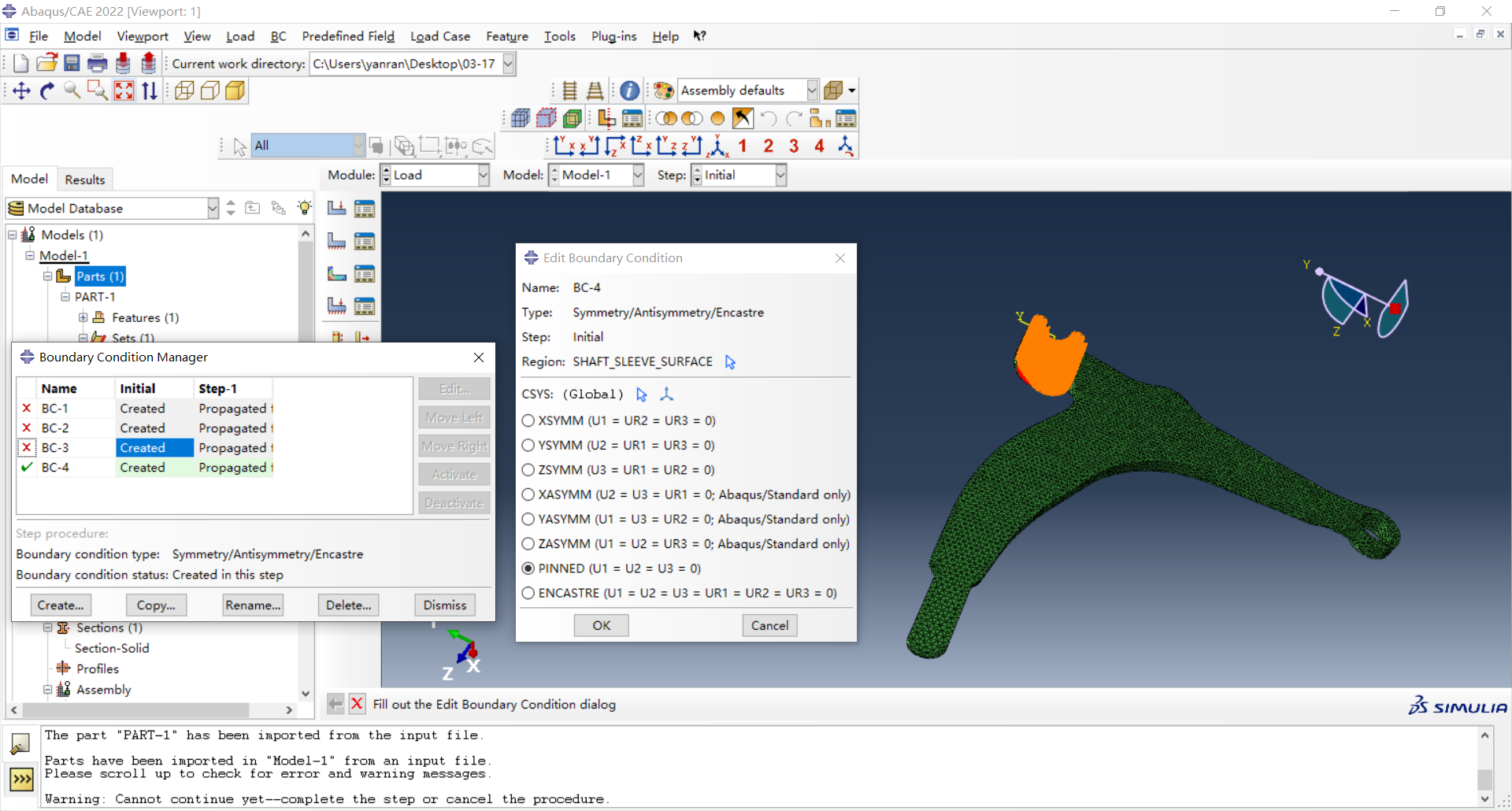
创建边界条件4:轴套限制为铰链约束,U1=U2=U3=0。
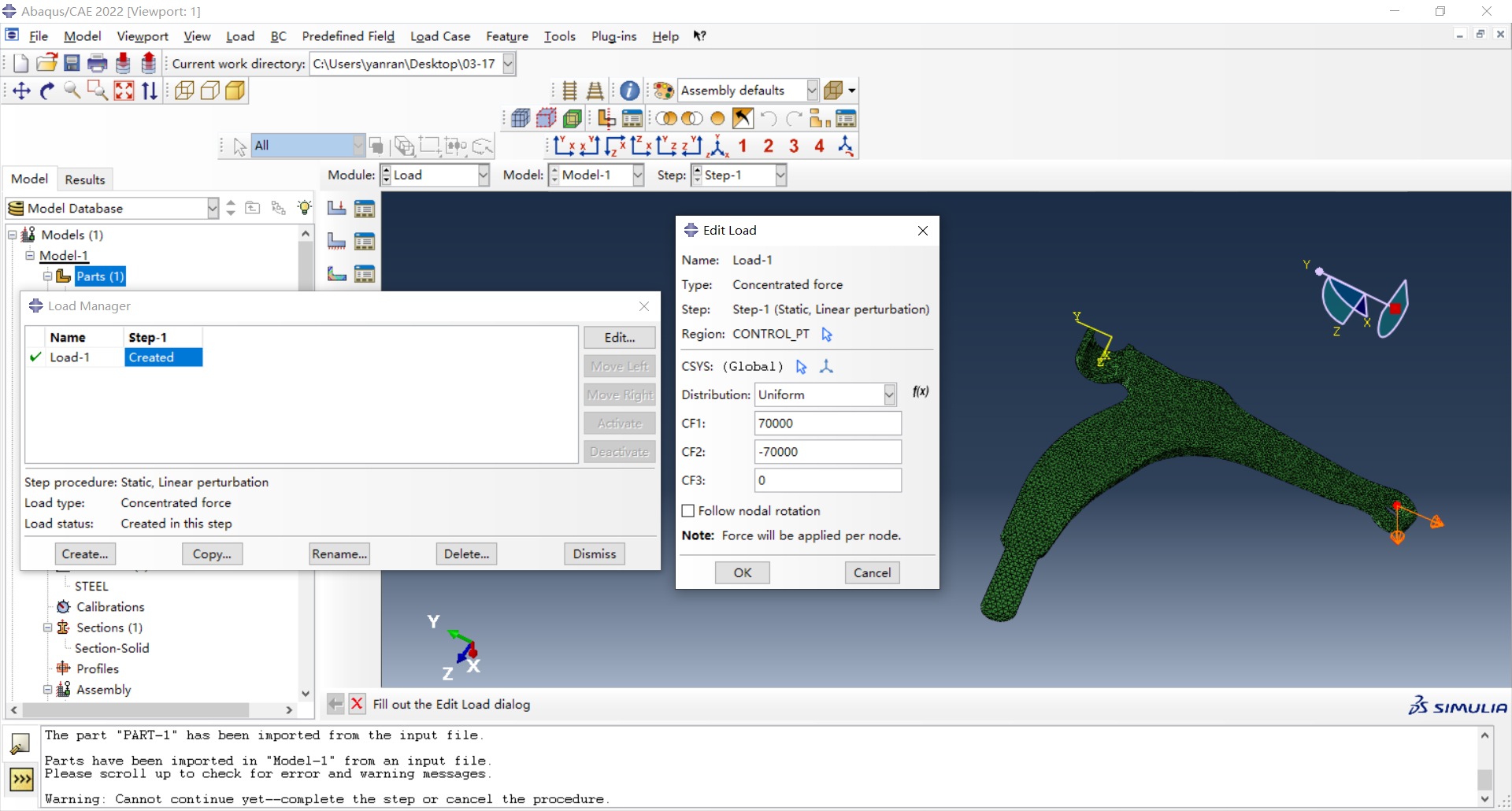
创建载荷1:在控制点施加沿着x方向70000 N和y方向−70000 N的集中力。
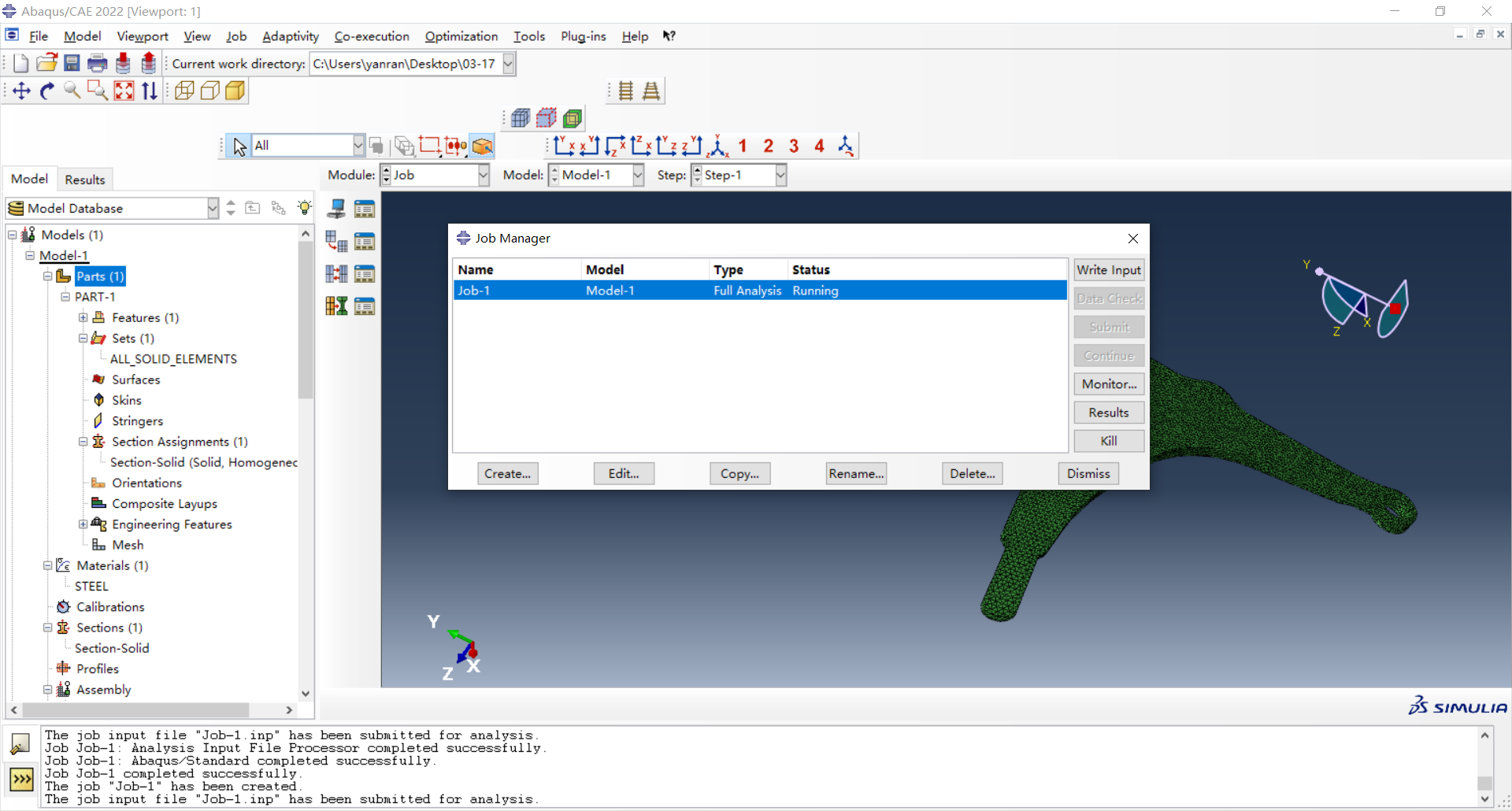
7.创建分析作业并提交分析
在JOB模块,创建Job-1分析作业。
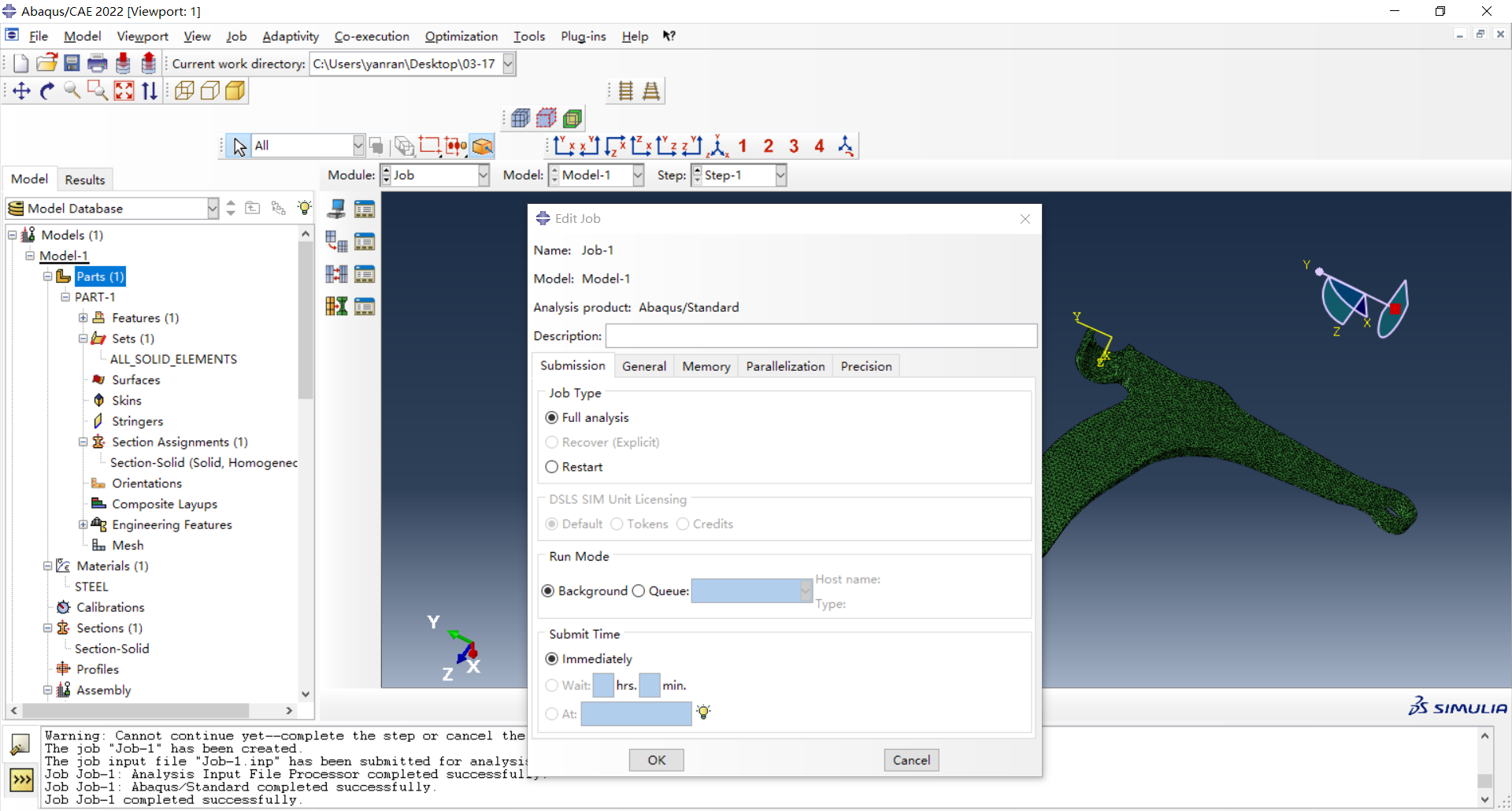
在作业管理器中,提交并监控分析作业。
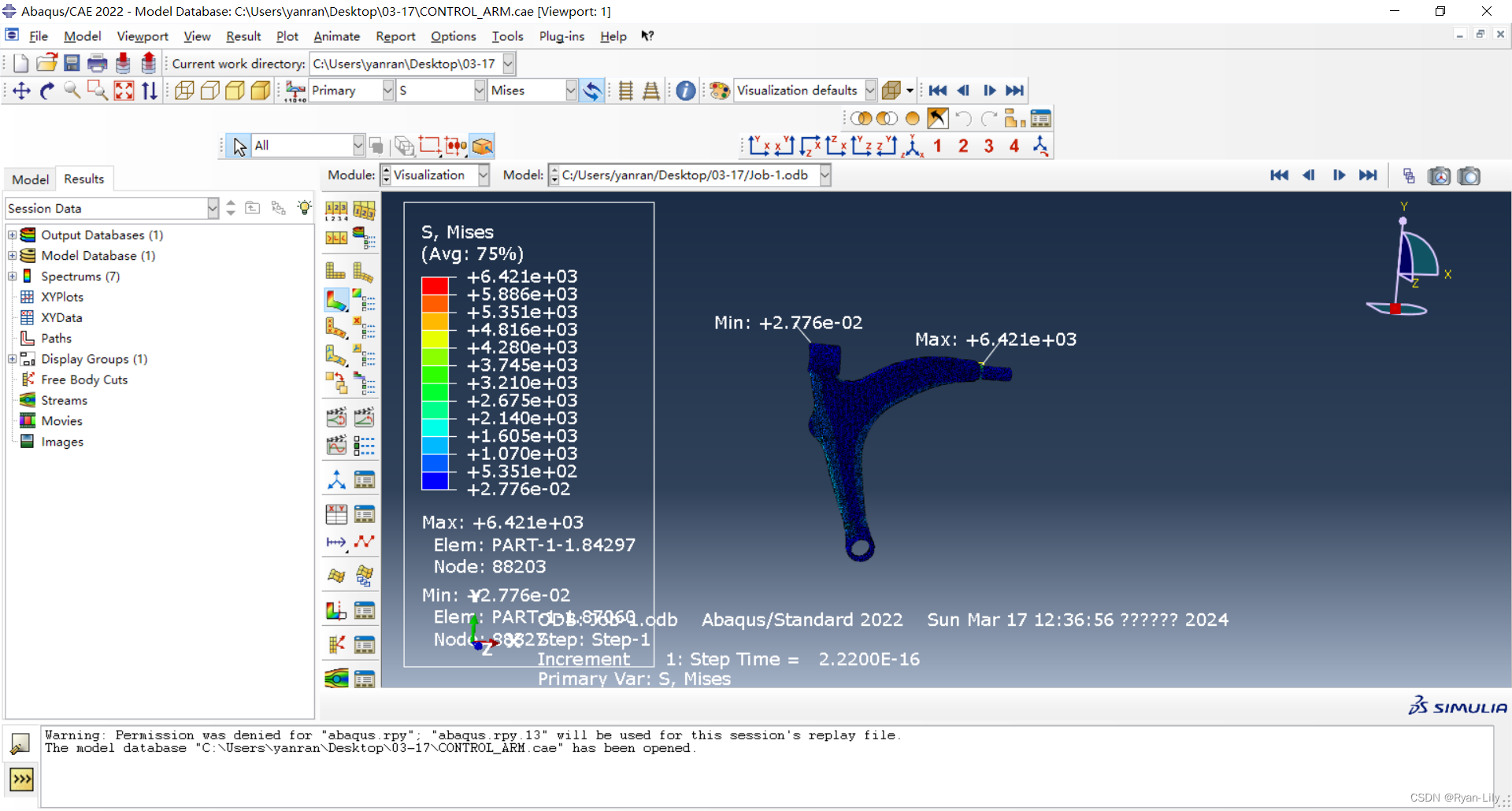
8.可视化后处理
在作业管理器中,点击Results,进入visualization模块。
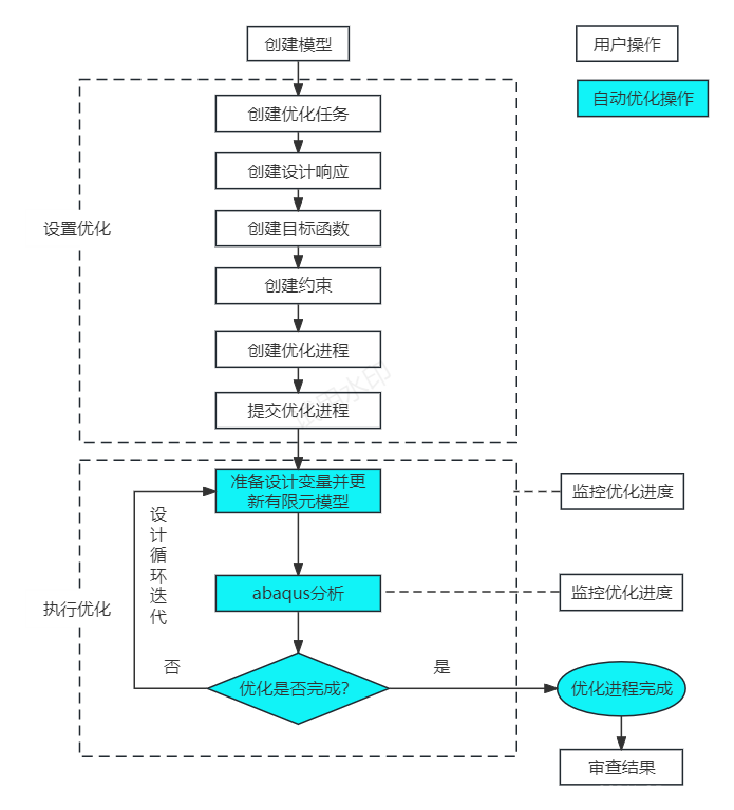
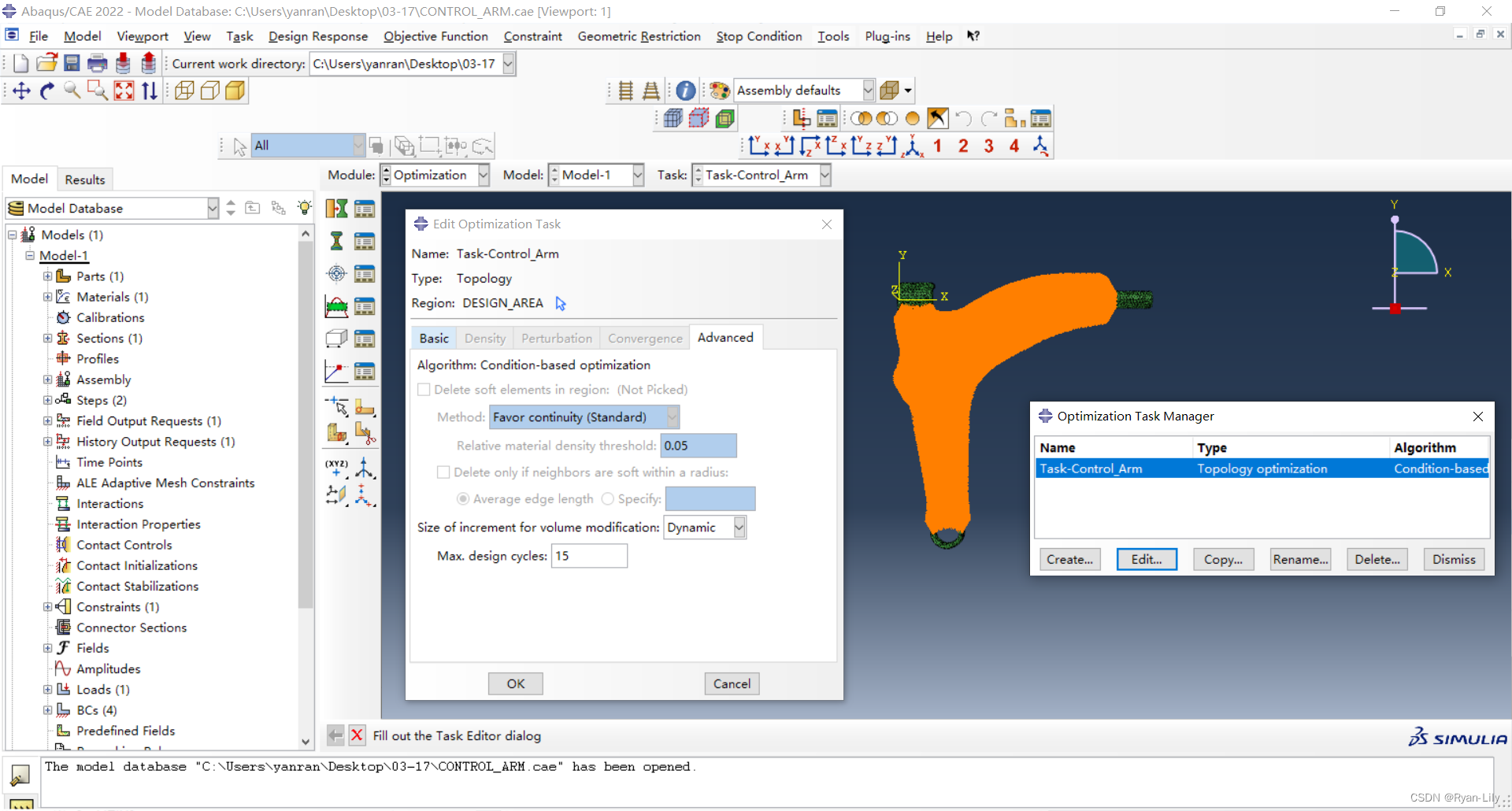
二、设置优化
1.创建优化任务
在OPTIMIZATION模块,创建基于条件算法的拓扑优化任务。
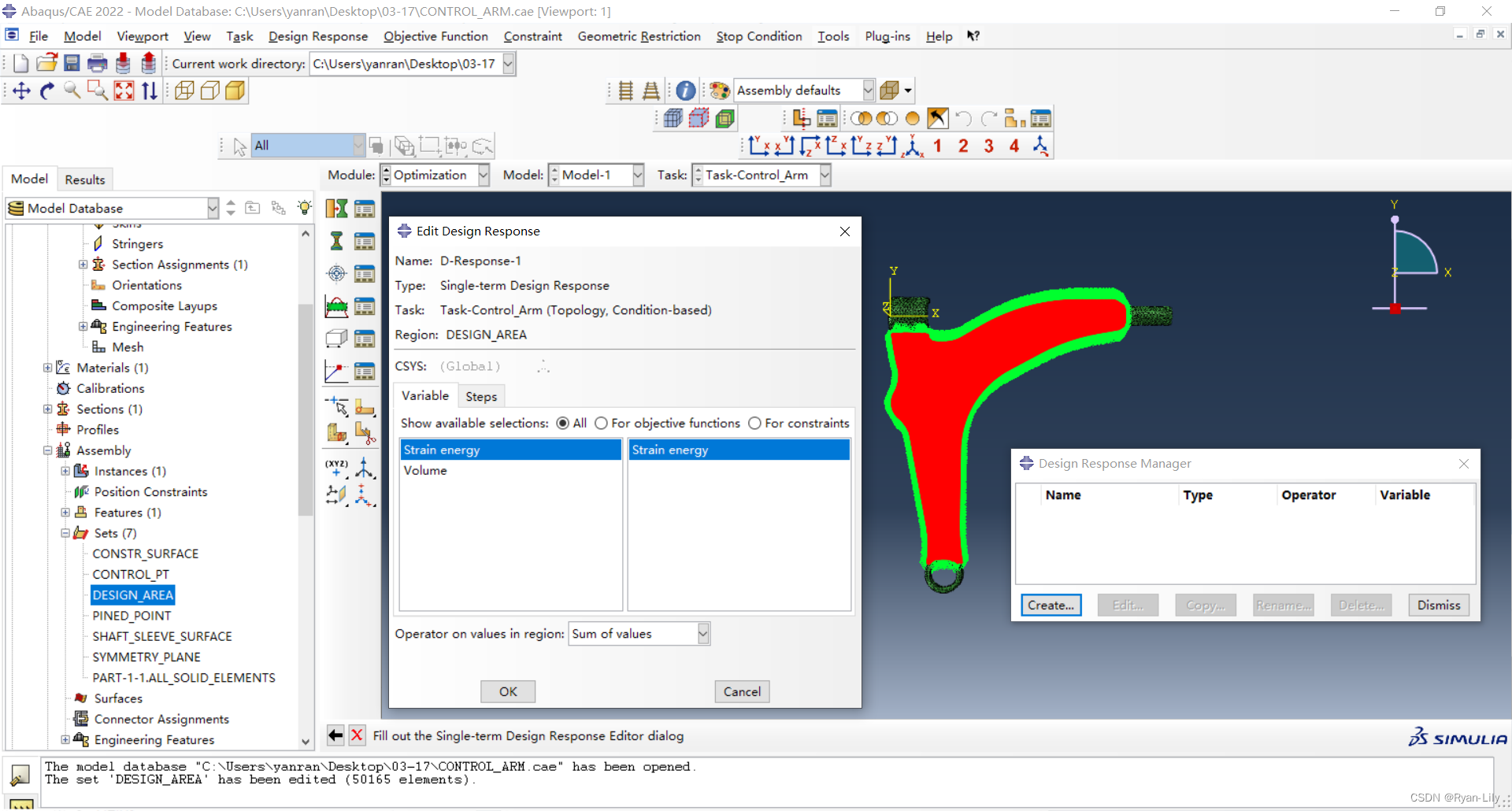
2.创建设计响应
创建设计响应1:设计区域中所有单元的应变能总和。
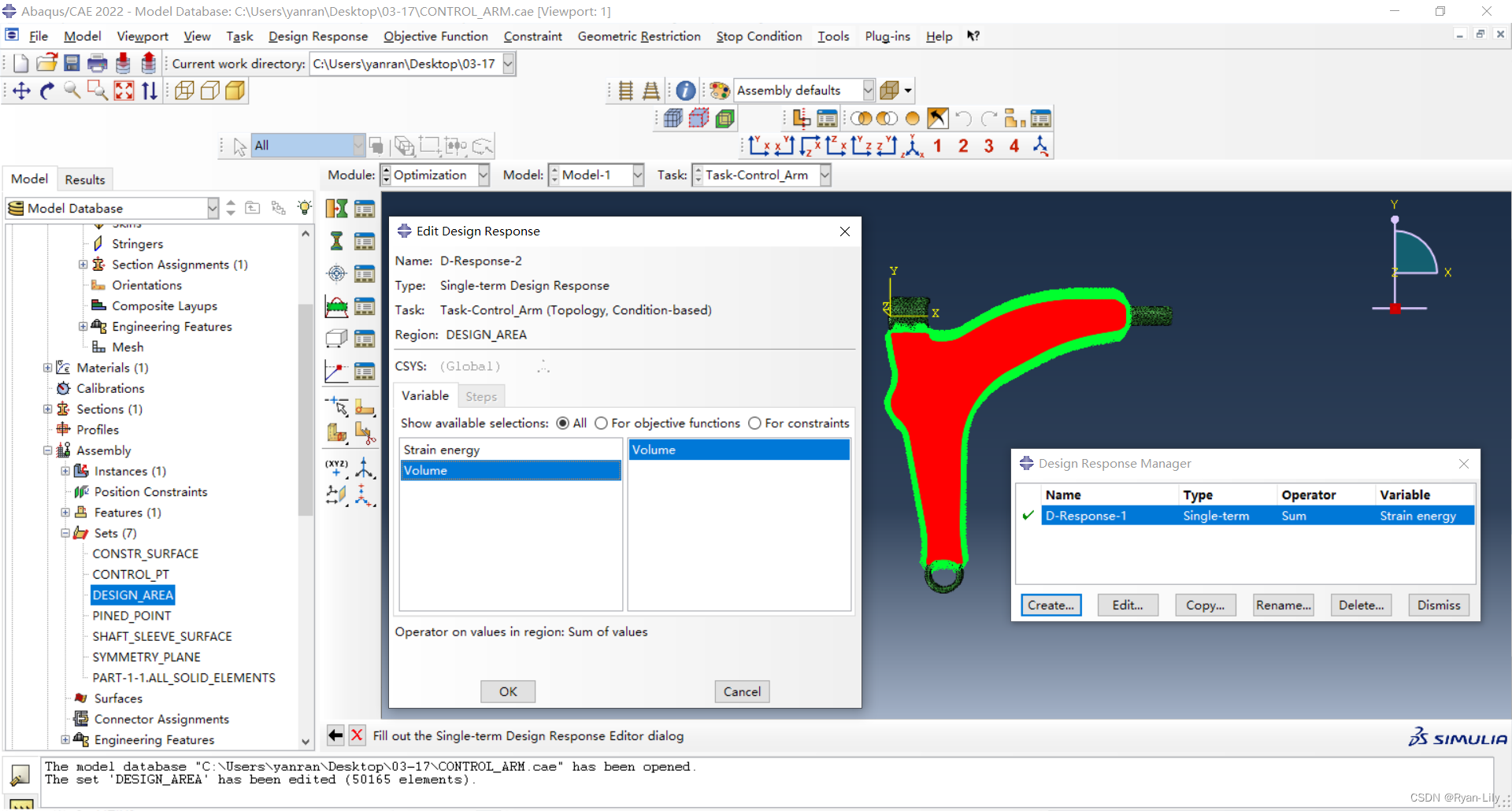
创建设计响应2:设计区域中所有单元的体积。
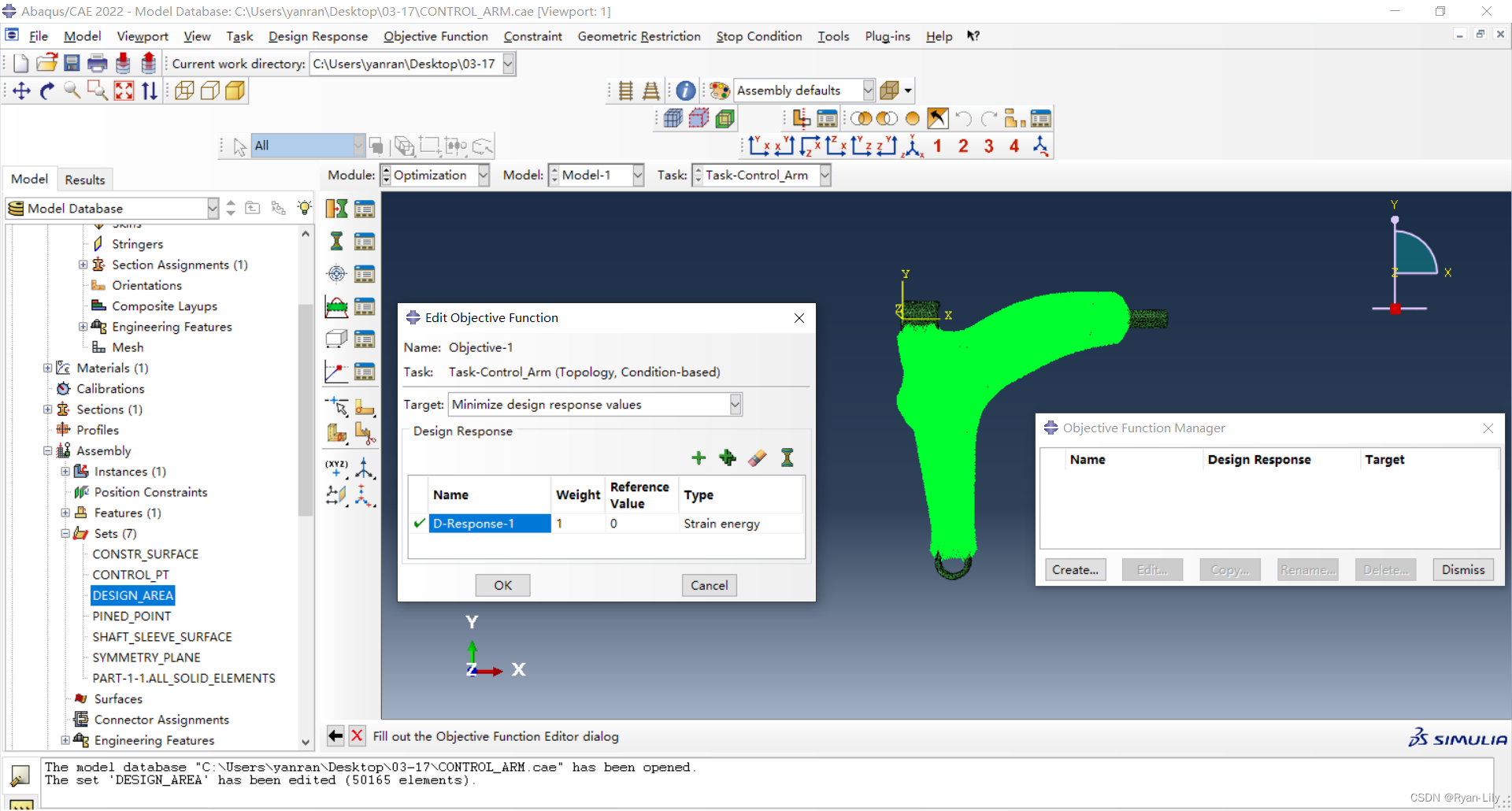
3.创建目标函数
创建目标函数:最小化设计区域中所有单元的应变能总和(设计响应1)。
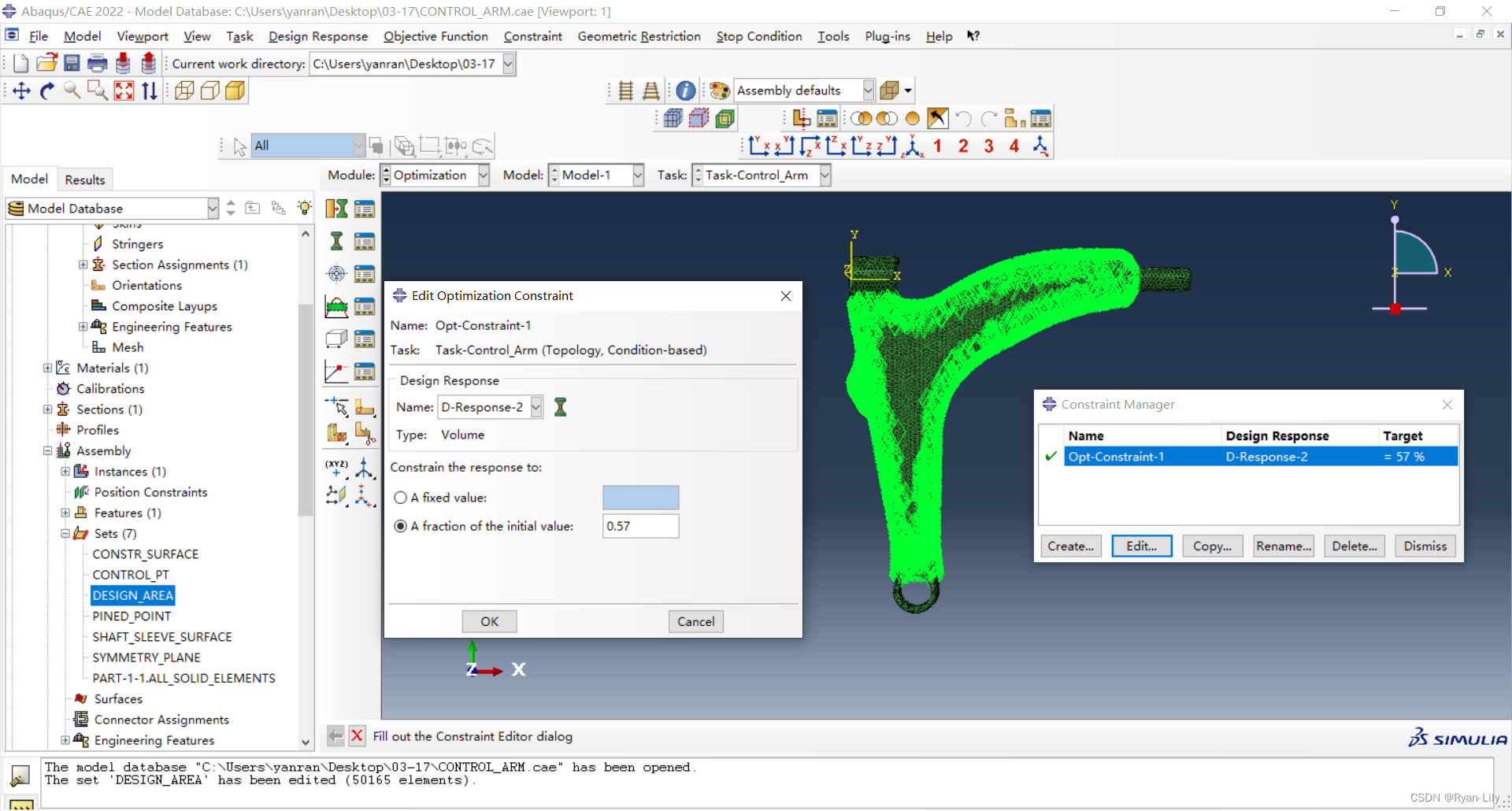
4.创建约束
创建约束:限制优化后模型应包含原始控制臂体积的57%。
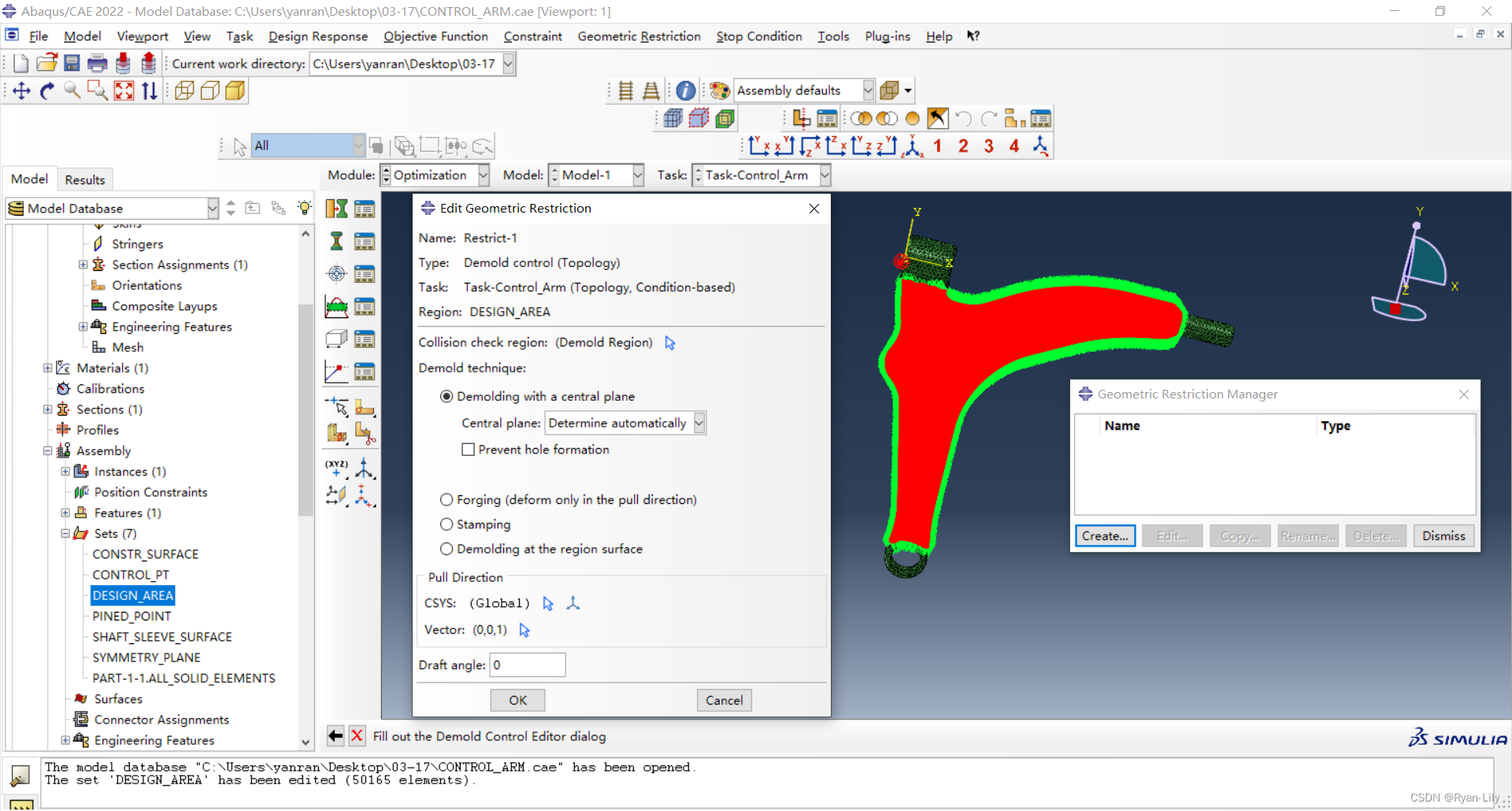
创建几何限制1:限制拓扑优化形成的结构可以从锻造模具中脱模。
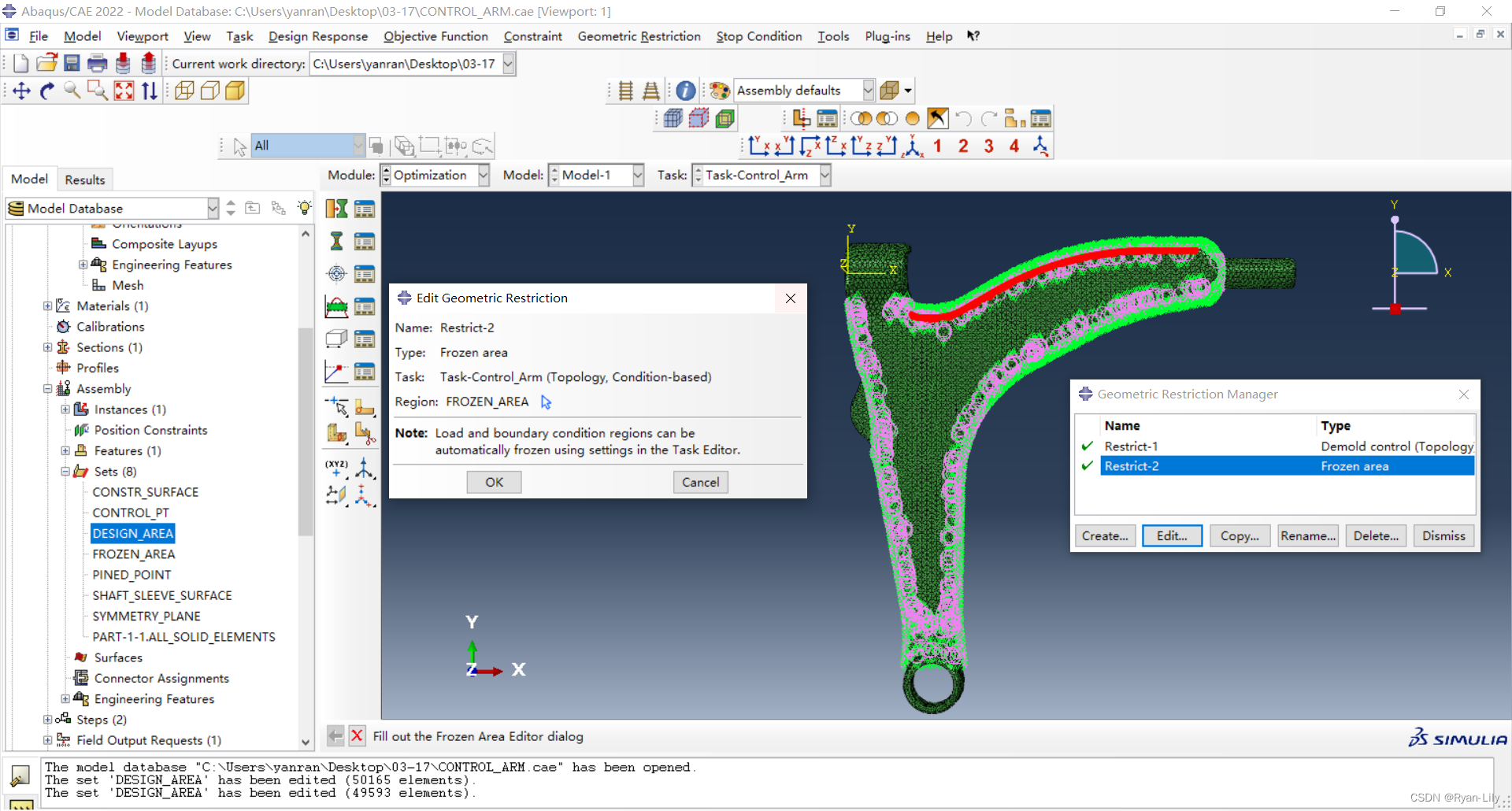
创建几何限制2:通过设置冻结区域,限制拓扑优化过程从结构上臂移除材料。
5.创建优化进程
在JOB模块,创建优化进程。 点击优化进程管理器中的提交进行分析。 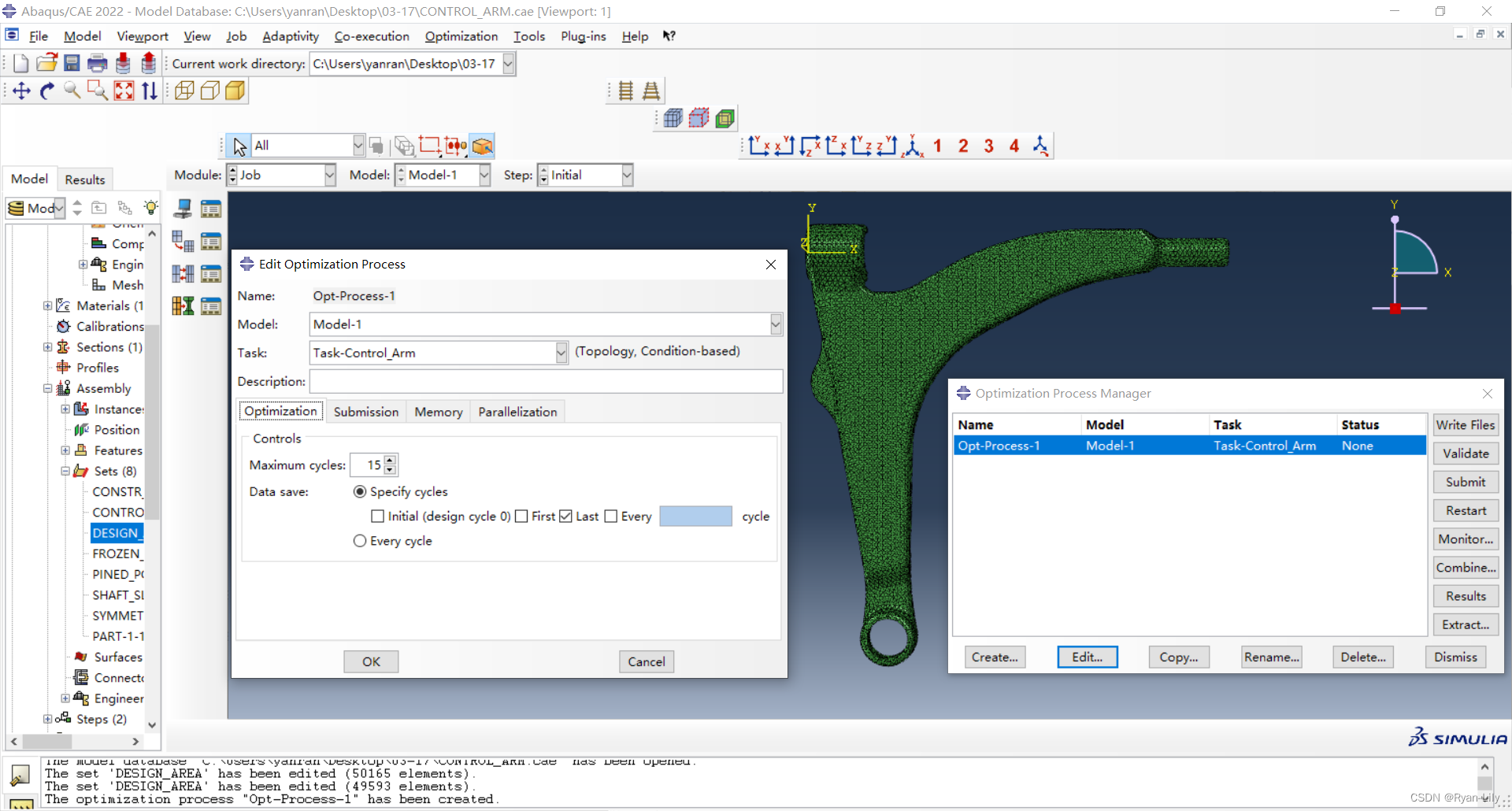
三、执行优化
1.监控优化进度
点击优化进程管理器中的Monitor监控优化进度。 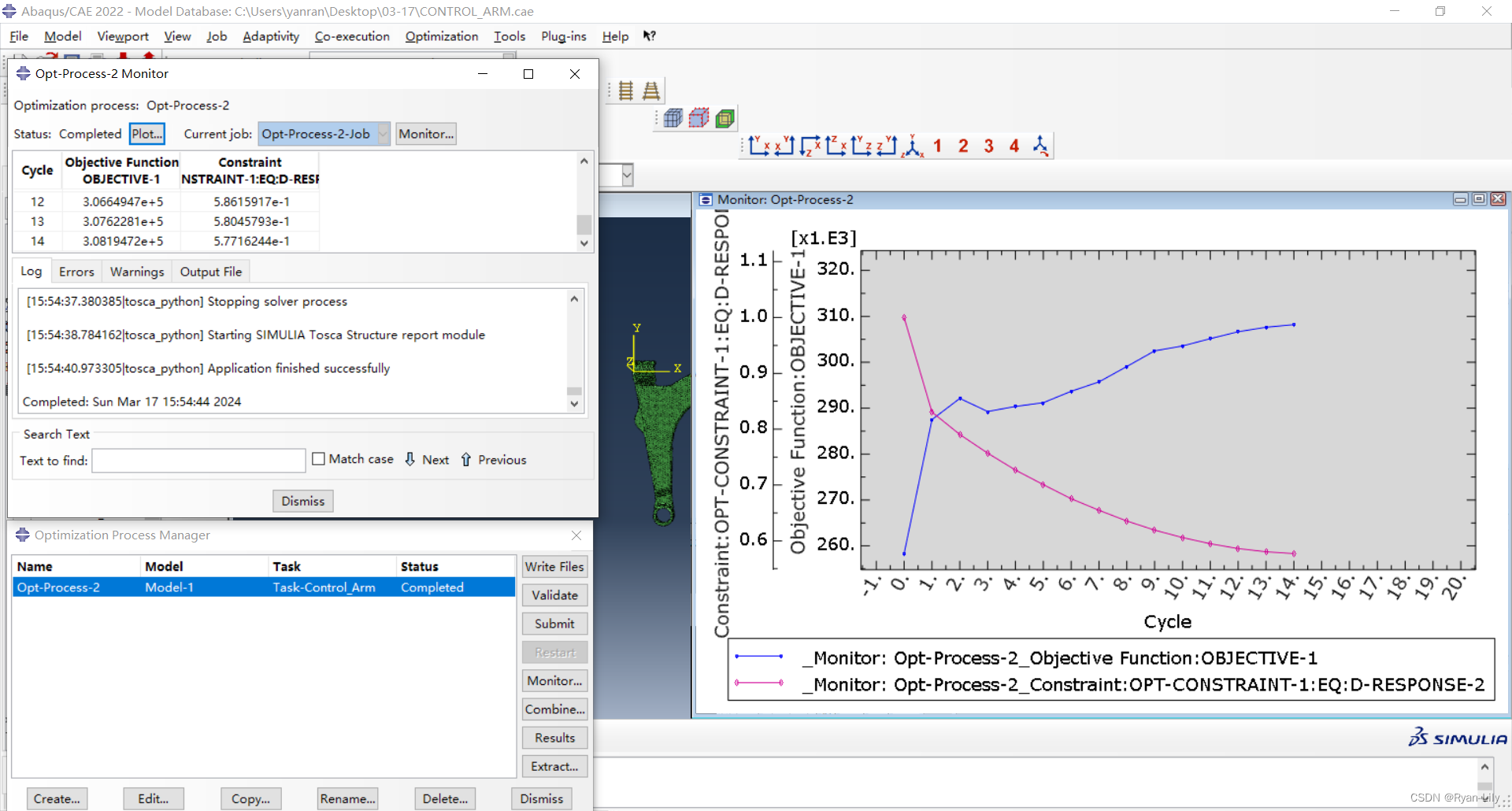 点击优化进程管理器中的Results查看优化结果。
点击优化进程管理器中的Results查看优化结果。 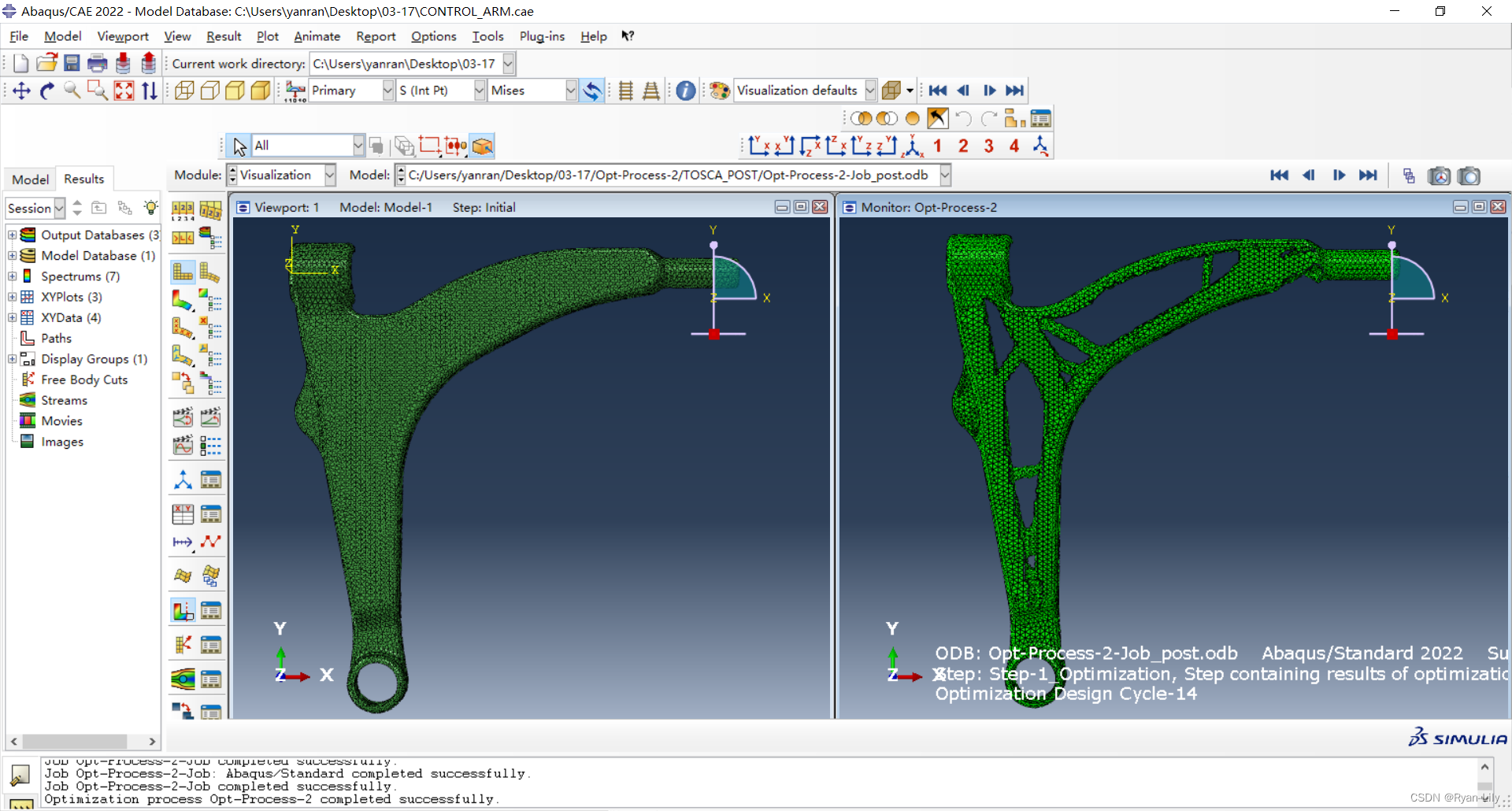
源文件下载-淘宝链接:


















 2227
2227

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









