






看的b站这个博主的视频https://b23.tv/FPm8Y5m学习
1,python图像处理,提取图像rgb通道并显示,灰度图像显示,剪切图像并显示
import cv2
# #打印cv2的版本号
# print(cv2.getVersionString())
image = cv2.imread("F:/enhancement/Test/Fusion/5.bmp")
# #图片大小
# print(image.shape)
# #提取RGB通道并显示
# cv2.imshow("b", image[:, :, 0])
# cv2.imshow("g", image[:, :, 1])
# cv2.imshow("r", image[:, :, 2])
# cv2.waitKey()
# #灰度图像
# gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# cv2.imshow("gray", gray)
# cv2.waitKey()
# # crop
crop = image[100:500, 300:800]
cv2.imshow("crop", crop)
cv2.waitKey()2.绘制
import cv2
import numpy as np
# #创建画布
image = np.zeros([300, 300, 3], dtype=np.uint8)
# #线段 起始坐标,终点坐标,线的颜色,线段粗细
cv2.line(image, (100, 200), (250, 250), (255, 0, 0), 2)
# #矩形 对角坐标
cv2.rectangle(image, (30, 100), (40, 150), (0, 255, 0), 2)
# #圆形 圆心,半径,颜色,粗细
cv2.circle(image, (150, 150), 20, (0, 0, 255), 3)
# #字符串,字符串内容,坐标,字体序号(0:默认),缩放系数,颜色,粗细,线条类型(1:实线)
cv2.putText(image, "hello", (100, 50), 0, 2, (255, 255, 255), 2, 1)
cv2.imshow("image", image)
cv2.waitKey()结果
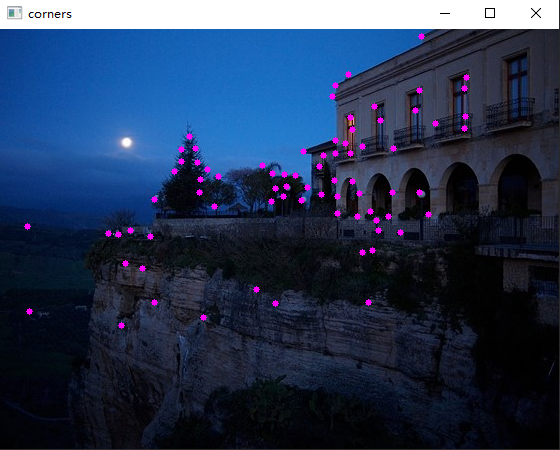
3.图像的特征点提取
import cv2
image = cv2.imread("F:/image enhancement/python/Low-light-Image-Enhancement-master/demo/2.bmp")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
corners = cv2.goodFeaturesToTrack(gray, 500, 0.1, 10)
for corner in corners:
x, y = corner.ravel()
cv2.circle(image, (int(x), int(y)), 3, (255, 0, 255), -1)
cv2.imshow("corners", image)
cv2.waitKey()结果
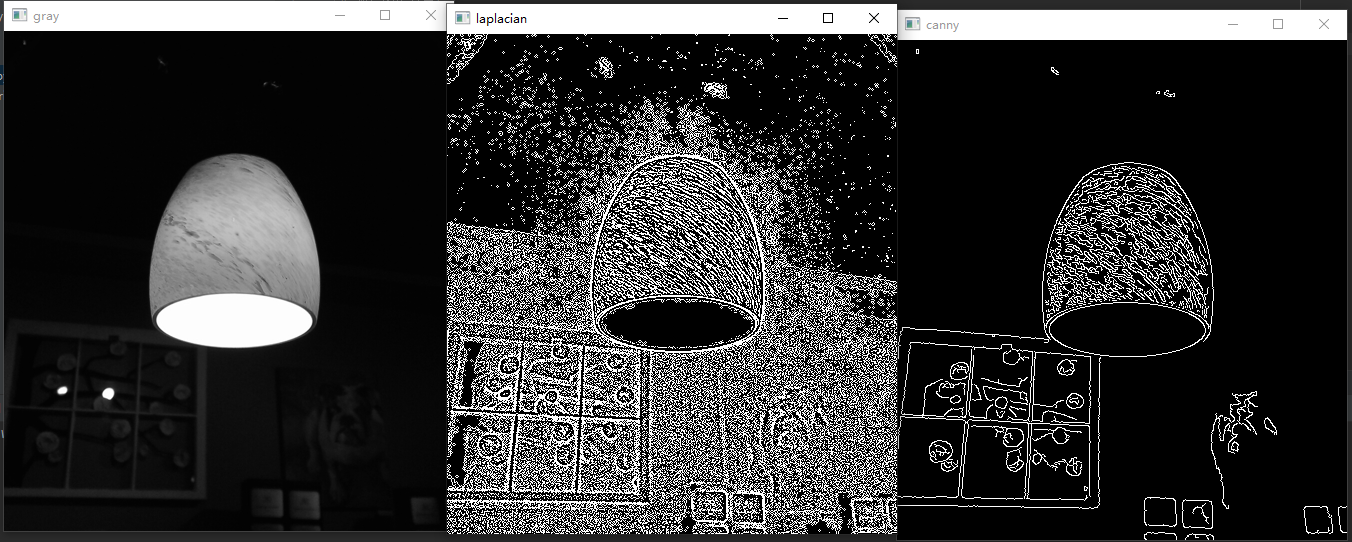
4.图像的梯度、canny边缘检测
import cv2
# 灰度图像方法1
gray = cv2.imread("F:/image enhancement/images/9.bmp", cv2.IMREAD_GRAYSCALE)
# #灰度图像方法2
# image = cv2.imread("F:/image enhancement/images/9.bmp")
# gray2 = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 拉普拉斯算子梯度算法
laplacian = cv2.Laplacian(gray, cv2.CV_64F)
# canny边缘提取(梯度区间,大于50是边缘,小于10不是边缘,之间的待定)
canny = cv2.Canny(gray, 10, 50)
cv2.imshow("gray", gray)
# cv2.imshow("gray2", gray2)
cv2.imshow("laplacian", laplacian)
cv2.imshow("canny", canny)
cv2.waitKey()结果
5图像的二值化
import cv2
gray = cv2.imread("F:/image enhancement/images/9.bmp", cv2.IMREAD_GRAYSCALE)
# 固定阈值,阈值为10, 最大灰度值255
ret, binary = cv2.threshold(gray, 20, 255, cv2.THRESH_BINARY)
# 自适应阈值
binary_adaptive = cv2.adaptiveThreshold(
gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 115, 1)
# otsu算法
ret1, binary_otsu = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
cv2.imshow("gray", gray)
cv2.imshow("binary", binary)
cv2.imshow("adaptive", binary_adaptive)
cv2.imshow("otsu", binary_otsu)
cv2.waitKey()结果

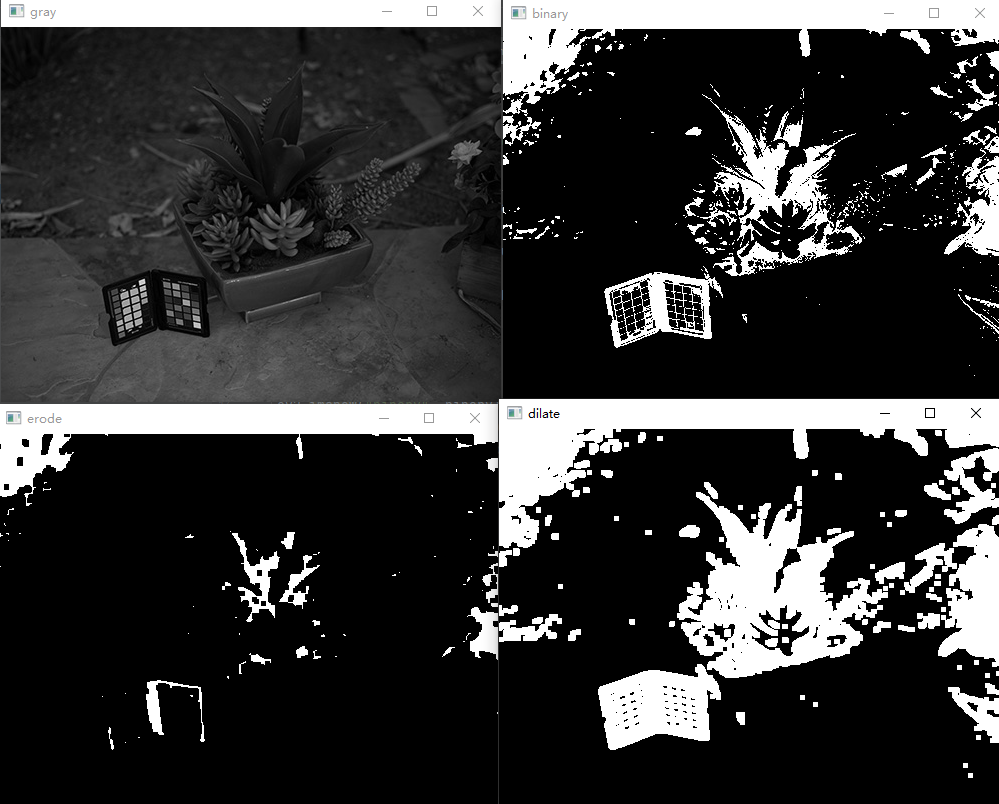
6,对图像进行膨胀腐蚀操作
import cv2
import numpy as np
gray = cv2.imread("F:/image enhancement/images/3.bmp", cv2.IMREAD_GRAYSCALE)
# 反向阈值,把背景变为黑色,物体变成白色
_, binary = cv2.threshold(gray, 20, 255, cv2.THRESH_BINARY_INV)
# 内核 5*5像素的正方形
kernel = np.ones((5, 5), np.uint8)
# 腐蚀
erosion = cv2.erode(binary, kernel)
# 膨胀
dilation = cv2.dilate(binary, kernel)
cv2.imshow("gray", gray)
cv2.imshow("binary", binary)
cv2.imshow("erode", erosion)
cv2.imshow("dilate", dilation)
cv2.waitKey()结果

















 2132
2132

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









