



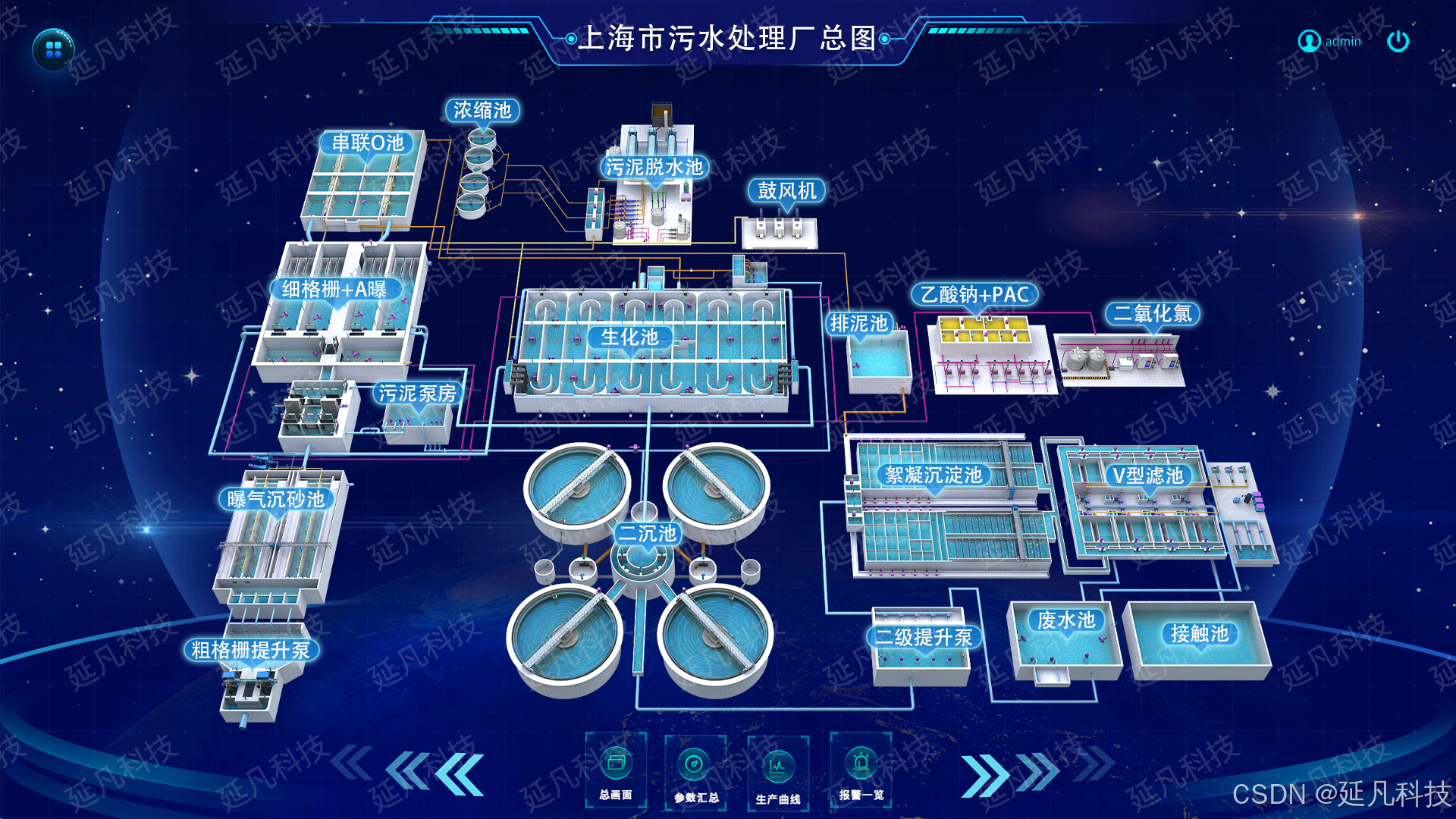
污水处理厂系统通过格栅、沉砂池等预处理设施拦截大颗粒杂质与砂粒,借助活性污泥法、生物膜法等生物处理工艺降解有机物,利用过滤、消毒等深度处理手段净化水质,配合污泥处理系统妥善处置污泥,全方位实现污水净化与资源合理利用 。
一、系统概述
(一)感知层
- 水质监测:在进水口、反应池、出水口等关键位置安装 COD、氨氮、总磷、pH 值等水质传感器,对污水各项指标进行实时精准监测。例如,采用哈希公司的 CODmax II 型 COD 传感器,检测精度高,可快速反馈水质中化学需氧量的变化。
- 设备状态监测:在水泵、风机、搅拌器等重要设备上部署振动、温度、电流、电压传感器。以水泵为例,通过振动传感器可提前察觉水泵轴承磨损、叶轮不平衡等潜在故障,避免突发停机。
- 流量与液位监测:在进水管网、出水管网及各处理池安装电磁流量计和超声波液位计,实时掌握污水流量与液位信息,为工艺调控提供数据基础。
- 视频监控:在厂区关键区域设置高清摄像头,利用图像识别技术辅助监测设备运行状态、人员操作行为及异常情况,如通过图像识别判断阀门是否正常开启。
(二)网络层
- 有线网络:采用工业以太网构建厂区内部网络,实现数据高速、稳定传输。在数据传输量大且对实时性要求高的区域,如中控室与关键设备间,使用光纤作为传输介质,保障数据传输的低延迟和高可靠性。
- 无线网络:对于部分移动设备(如巡检终端)或布线困难的区域,部署无线局域网(WLAN)或 4G/5G 网络。例如,巡检人员可通过手持终端连接无线网络,实时上传巡检数据和现场照片。
(三)平台层
- 数据中心:搭建大数据存储与管理平台,汇聚感知层采集的各类数据。采用分布式存储技术,如 Ceph 分布式存储系统,确保数据的安全性和可扩展性。对数据进行清洗、预处理,建立数据仓库,为数据分析和应用提供高质量数据。
- 数据分析与挖掘平台:运用机器学习、深度学习算法对污水处理数据进行深度分析。如利用时间序列分析算法预测水质变化趋势,通过聚类算法对设备运行状态进行分类,提前发现异常工况。
- 数字孪生平台:基于地理信息系统(GIS)和建筑信息模型(BIM)技术,构建污水处理厂的三维数字模型。将实时数据与模型相结合,实现物理实体与虚拟模型的同步映射,为工艺优化和决策提供直观可视化工具。
(四)应用层
- 智能运营管理:根据实时水质、水量及设备状态数据,自动生成优化的运营调度方案。如在进水水质波动时,自动调整曝气量、药剂投加量和处理工艺参数,保障出水水质稳定达标,同时降低能耗和药剂消耗。
- 智能运维:通过设备状态监测数据和故障预测模型,实现设备的预防性维护。当设备出现潜在故障风险时,系统自动推送维修工单给相关人员,并提供维修建议和历史维修记录。利用 AR(增强现实)技术辅助设备维修,维修人员通过智能眼镜可查看设备三维模型、装配图及维修步骤。
- 能源管理:实时监测厂区内各类设备的能耗数据,分析能源消耗规律。采用智能控制策略,如根据处理量动态调整风机、水泵的运行频率,实现能源的高效利用,降低运行成本。
- 安全管理:整合视频监控、入侵检测、气体监测等系统,构建全方位安全防护体系。当发生安全事件(如人员闯入、有害气体泄漏)时,系统立即发出警报,并联动相关设备进行应急处理,如启动通风系统、关闭相关阀门。
- 决策支持:基于数据分析结果和数字孪生模型,为管理层提供决策支持。通过模拟不同工况下的处理效果,评估新的运营策略、设备升级方案或工艺改进措施的可行性,辅助制定科学合理的发展规划。
二、系统介绍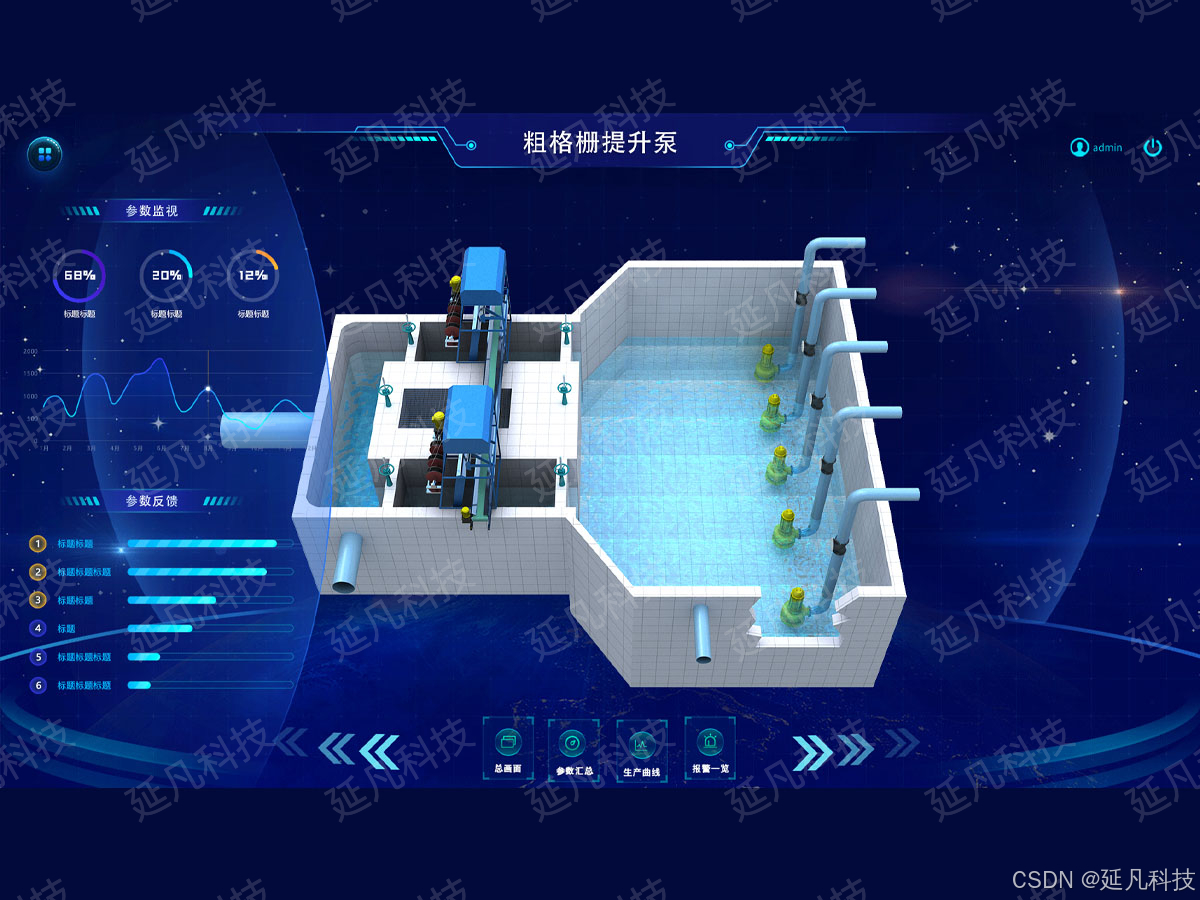



















 321
321

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









