




 本文介绍了CBAM(Convolutional Block Attention Module),它采用block形式,对特征矩阵重新构造。包含通道注意力和空间注意力机制,前者过滤通道以优化特征,后者关注特征位置。还给出了相关公式,并展示了将其应用到ResNet的例子,最后提及了Pytorch实现代码。
本文介绍了CBAM(Convolutional Block Attention Module),它采用block形式,对特征矩阵重新构造。包含通道注意力和空间注意力机制,前者过滤通道以优化特征,后者关注特征位置。还给出了相关公式,并展示了将其应用到ResNet的例子,最后提及了Pytorch实现代码。
文章目录
CBAM: Convolutional Block Attention Module
CBAM依然采用了block的形式,但是在每一个block上进行更加细致的设计来使得网络的结构更加合理有效。
结构
作者采用了类似于人类attention,也就是注意力的机制,对一个特征矩阵进行重新构造。注意力机制就是采用一种可以学习的方式来对特征重新赋予权重,权重高的特征就是注意力的注意点.
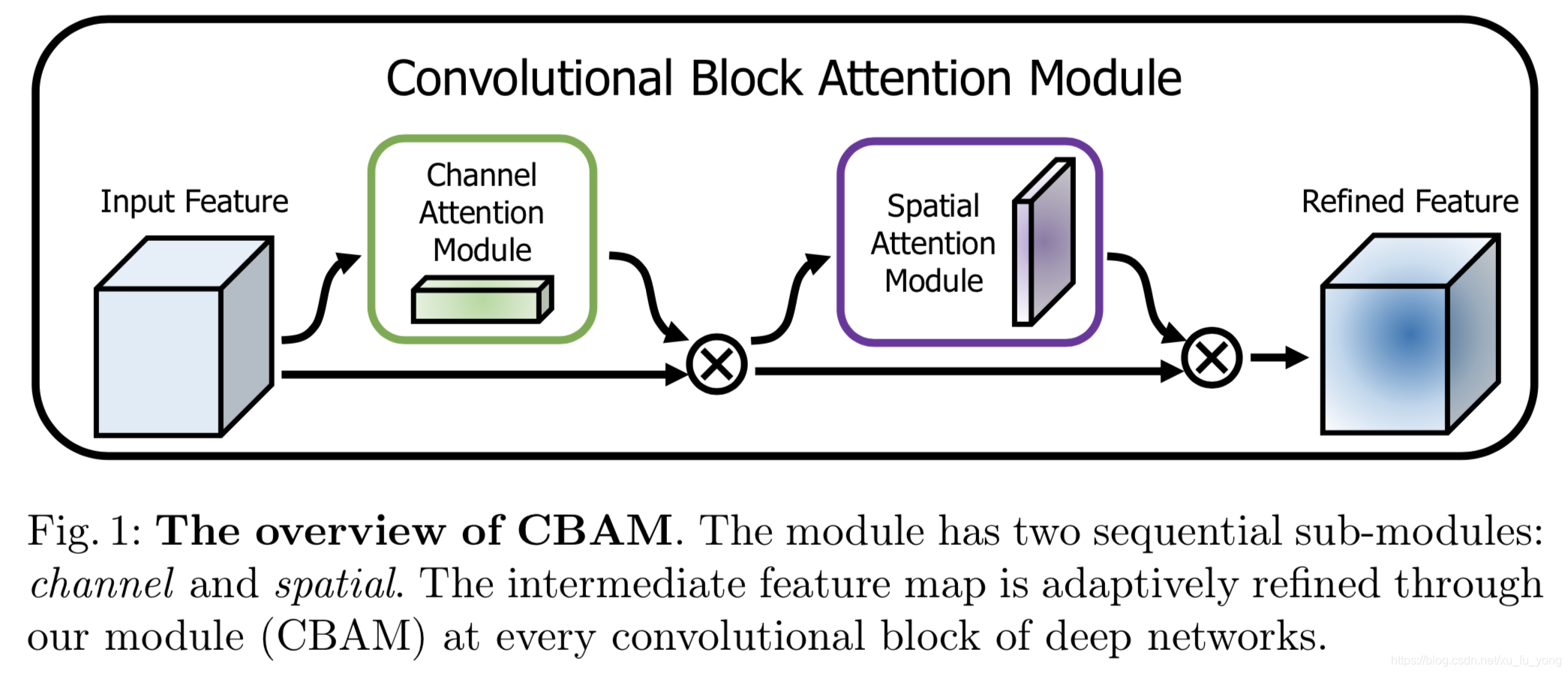
Convolutional Block Attention Module
上面的结构图可以看到,一个特征经过一个Channel Attention Module和一个Spatial Attention Module被重新构造,输出了一个精修过的特征矩阵。
通道注意力
首先是通道注意力,我们知道一张图片经过几个卷积层会得到一个特征矩阵,这个矩阵的通道数就是卷积层核的个数。那么,一个常见的卷积核经常达到1024,2048个,并不是每个通道都对于信息传递非常有用了的。因此,通过对这些通道进行过滤,也就是注意,来得到优化后的特征.
主要思路就是:增大有效通道权重,减少无效通道的权重.
公式如下:
M
c
(
F
)
=
σ
(
M
L
P
(
AvgPool
(
F
)
)
+
M
L
P
(
Max
Pool
(
F
)
)
)
\mathbf{M}_{\mathbf{c}}(\mathbf{F})=\sigma(M L P(\text {AvgPool}(\mathbf{F}))+M L P(\operatorname{Max} \operatorname{Pool}(\mathbf{F})))
Mc(F)=σ(MLP(AvgPool(F))+MLP(MaxPool(F)))
=
σ
(
W
1
(
W
o
(
F
a
v
g
c
)
)
+
W
1
(
W
0
(
F
max
c
)
)
)
=\sigma\left(\mathbf{W}_{\mathbf{1}}\left(\mathbf{W}_{\mathbf{o}}\left(\mathbf{F}_{\mathbf{a v g}}^{\mathbf{c}}\right)\right)+\mathbf{W}_{\mathbf{1}}\left(\mathbf{W}_{\mathbf{0}}\left(\mathbf{F}_{\max }^{\mathbf{c}}\right)\right)\right)
=σ(W1(Wo(Favgc))+W1(W0(Fmaxc)))
通道注意力结构如下:

在通道维度上进行全局的pooling操作,再经过同一个MLP得到权重,相加作为最终的注意力向量(权重)。
这里非常像SENet,SENet在很多论文中都被证实对效果有提升,这里的区别是,SENet采用的是平均值的pooling,这篇论文又加入了最大值pooling。作者在论文中,通过对比实验,证实max pooling提高了效果。
注意这里的MLP的中间层较小,这个可能有助于信息的整合。
空间注意力
论文中,作者认为通道注意力关注的是:what,然而空间注意力关注的是:Where。
公式如下:
M
s
(
F
)
=
σ
(
f
7
×
7
(
[
Avg
P
o
o
l
(
F
)
;
MaxPool
(
F
)
]
)
)
\mathbf{M}_{\mathbf{s}}(\mathbf{F})=\sigma\left(f^{7 \times 7}([\operatorname{Avg} P o o l(\mathbf{F}) ; \operatorname{MaxPool}(\mathbf{F})])\right)
Ms(F)=σ(f7×7([AvgPool(F);MaxPool(F)]))
=
σ
(
f
7
×
7
(
[
F
a
v
g
s
;
F
m
a
x
s
]
)
)
=\sigma\left(f^{7 \times 7}\left(\left[\mathbf{F}_{\mathrm{avg}}^{\mathrm{s}} ; \mathbf{F}_{\mathrm{max}}^{\mathrm{s}}\right]\right)\right)
=σ(f7×7([Favgs;Fmaxs]))
空间注意力结构图如下:

同样使用了avg-pooling和max-pooling来对信息进行评估,使用一个7*7的卷积来进行提取。
注意权重都通过sigmoid来进行归一化。
下图是一个将论文的方法应用到ResNet的例子:
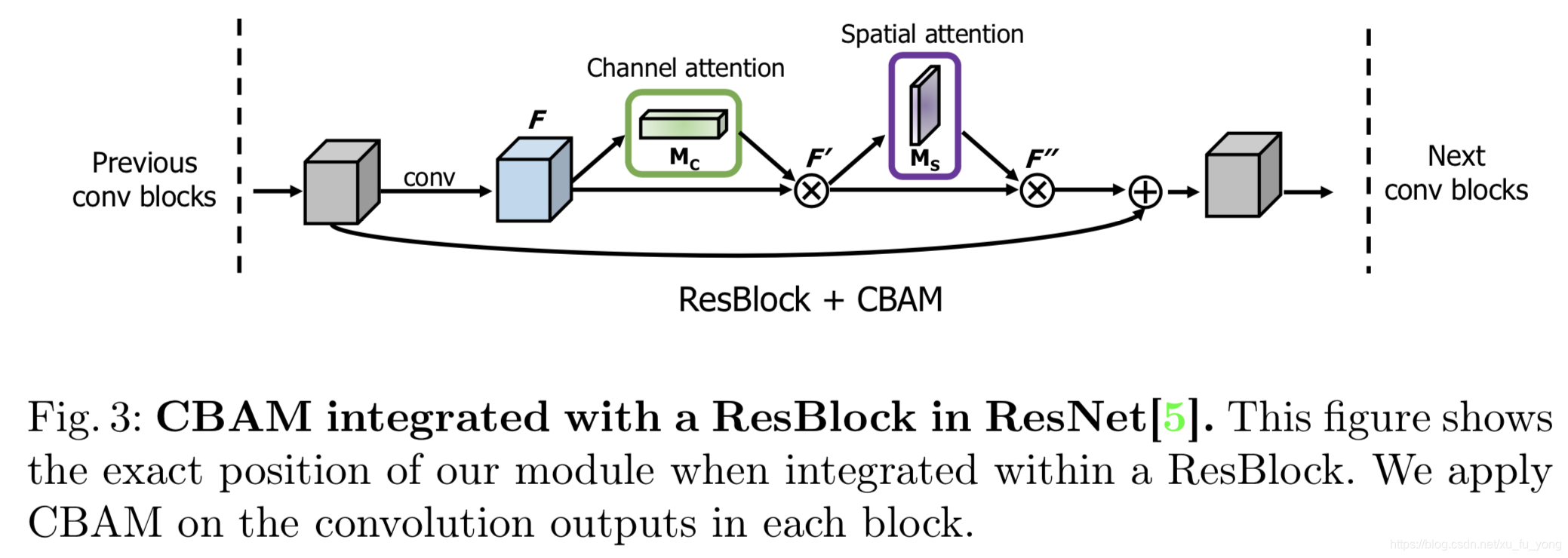
将模型应用到每一个ResNet block的输出上。
Pytorch实现CBAM
此处代码是将其应用到resnext,可以在github链接查看代码实现
# -*-coding:utf-8-*-
import math
import torch
import torch.nn as nn
import torch.nn.functional as F
__all__ = ['cbam_resnext29_8x64d', 'cbam_resnext29_16x64d']
class BasicConv(nn.Module):
def __init__(self, in_planes, out_planes, kernel_size, stride=1, padding=0, dilation=1, groups=1, relu=True, bn=True, bias=False):
super(BasicConv, self).__init__()
self.out_channels = out_planes
self.conv = nn.Conv2d(in_planes, out_planes, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups, bias=bias)
self.bn = nn.BatchNorm2d(out_planes, eps=1e-5,
momentum=0.01, affine=True) if bn else None
self.relu = nn.ReLU() if relu else None
def forward(self, x):
x = self.conv(x)
if self.bn is not None:
x = self.bn(x)
if self.relu is not None:
x = self.relu(x)
return x
class Flatten(nn.Module):
def forward(self, x):
return x.view(x.size(0), -1)
class ChannelGate(nn.Module):
def __init__(self, gate_channels, reduction_ratio=16, pool_types=['avg', 'max']):
super(ChannelGate, self).__init__()
self.gate_channels = gate_channels
self.mlp = nn.Sequential(
Flatten(),
nn.Linear(gate_channels, gate_channels // reduction_ratio),
nn.ReLU(),
nn.Linear(gate_channels // reduction_ratio, gate_channels)
)
self.pool_types = pool_types
def forward(self, x):
channel_att_sum = None
for pool_type in self.pool_types:
if pool_type == 'avg':
avg_pool = F.avg_pool2d(
x, (x.size(2), x.size(3)), stride=(x.size(2), x.size(3)))
channel_att_raw = self.mlp(avg_pool)
elif pool_type == 'max':
max_pool = F.max_pool2d(
x, (x.size(2), x.size(3)), stride=(x.size(2), x.size(3)))
channel_att_raw = self.mlp(max_pool)
elif pool_type == 'lp':
lp_pool = F.lp_pool2d(
x, 2, (x.size(2), x.size(3)), stride=(x.size(2), x.size(3)))
channel_att_raw = self.mlp(lp_pool)
elif pool_type == 'lse':
# LSE pool only
lse_pool = logsumexp_2d(x)
channel_att_raw = self.mlp(lse_pool)
if channel_att_sum is None:
channel_att_sum = channel_att_raw
else:
channel_att_sum = channel_att_sum + channel_att_raw
scale = torch.sigmoid(channel_att_sum).unsqueeze(
2).unsqueeze(3).expand_as(x)
return x * scale
def logsumexp_2d(tensor):
tensor_flatten = tensor.view(tensor.size(0), tensor.size(1), -1)
s, _ = torch.max(tensor_flatten, dim=2, keepdim=True)
outputs = s + (tensor_flatten - s).exp().sum(dim=2, keepdim=True).log()
return outputs
class ChannelPool(nn.Module):
def forward(self, x):
return torch.cat((torch.max(x, 1)[0].unsqueeze(1), torch.mean(x, 1).unsqueeze(1)), dim=1)
class SpatialGate(nn.Module):
def __init__(self):
super(SpatialGate, self).__init__()
kernel_size = 7
self.compress = ChannelPool()
self.spatial = BasicConv(2, 1, kernel_size, stride=1, padding=(
kernel_size-1) // 2, relu=False)
def forward(self, x):
x_compress = self.compress(x)
x_out = self.spatial(x_compress)
scale = torch.sigmoid(x_out) # broadcasting
return x * scale
class CBAM(nn.Module):
def __init__(self, gate_channels, reduction_ratio=16, pool_types=['avg', 'max'], no_spatial=False):
super(CBAM, self).__init__()
self.ChannelGate = ChannelGate(
gate_channels, reduction_ratio, pool_types)
self.no_spatial = no_spatial
if not no_spatial:
self.SpatialGate = SpatialGate()
def forward(self, x):
x_out = self.ChannelGate(x)
if not self.no_spatial:
x_out = self.SpatialGate(x_out)
return x_out
class Bottleneck(nn.Module):
def __init__(self, in_channels, out_channels, stride, cardinality, base_width, expansion):
super(Bottleneck, self).__init__()
width_ratio = out_channels / (expansion * 64.)
D = cardinality * int(base_width * width_ratio)
self.relu = nn.ReLU(inplace=True)
self.cbam_module = CBAM(out_channels)
self.conv_reduce = nn.Conv2d(
in_channels, D, kernel_size=1, stride=1, padding=0, bias=False)
self.bn_reduce = nn.BatchNorm2d(D)
self.conv_conv = nn.Conv2d(
D, D, kernel_size=3, stride=stride, padding=1, groups=cardinality, bias=False)
self.bn = nn.BatchNorm2d(D)
self.conv_expand = nn.Conv2d(
D, out_channels, kernel_size=1, stride=1, padding=0, bias=False)
self.bn_expand = nn.BatchNorm2d(out_channels)
self.shortcut = nn.Sequential()
if in_channels != out_channels:
self.shortcut.add_module('shortcut_conv',
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, padding=0,
bias=False))
self.shortcut.add_module(
'shortcut_bn', nn.BatchNorm2d(out_channels))
def forward(self, x):
out = self.conv_reduce.forward(x)
out = self.relu(self.bn_reduce.forward(out))
out = self.conv_conv.forward(out)
out = self.relu(self.bn.forward(out))
out = self.conv_expand.forward(out)
out = self.bn_expand.forward(out)
residual = self.shortcut.forward(x)
out = self.cbam_module(out) + residual
out = self.relu(out)
return out
class SeResNeXt(nn.Module):
def __init__(self, cardinality, depth, num_classes, base_width, expansion=4):
super(SeResNeXt, self).__init__()
self.cardinality = cardinality
self.depth = depth
self.block_depth = (self.depth - 2) // 9
self.base_width = base_width
self.expansion = expansion
self.num_classes = num_classes
self.output_size = 64
self.stages = [64, 64 * self.expansion, 128 *
self.expansion, 256 * self.expansion]
self.conv_1_3x3 = nn.Conv2d(3, 64, 3, 1, 1, bias=False)
self.bn_1 = nn.BatchNorm2d(64)
self.stage_1 = self.block('stage_1', self.stages[0], self.stages[1], 1)
self.stage_2 = self.block('stage_2', self.stages[1], self.stages[2], 2)
self.stage_3 = self.block('stage_3', self.stages[2], self.stages[3], 2)
self.fc = nn.Linear(self.stages[3], num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight.data)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def block(self, name, in_channels, out_channels, pool_stride=2):
block = nn.Sequential()
for bottleneck in range(self.block_depth):
name_ = '%s_bottleneck_%d' % (name, bottleneck)
if bottleneck == 0:
block.add_module(name_, Bottleneck(in_channels, out_channels, pool_stride, self.cardinality,
self.base_width, self.expansion))
else:
block.add_module(name_,
Bottleneck(out_channels, out_channels, 1, self.cardinality, self.base_width,
self.expansion))
return block
def forward(self, x):
x = self.conv_1_3x3.forward(x)
x = F.relu(self.bn_1.forward(x), inplace=True)
x = self.stage_1.forward(x)
x = self.stage_2.forward(x)
x = self.stage_3.forward(x)
x = F.avg_pool2d(x, 8, 1)
x = x.view(-1, self.stages[3])
return self.fc(x)
def cbam_resnext29_8x64d(num_classes):
return SeResNeXt(cardinality=8, depth=29, num_classes=num_classes, base_width=64)
def cbam_resnext29_16x64d(num_classes):
return SeResNeXt(cardinality=16, depth=29, num_classes=num_classes, base_width=64)



















 1万+
1万+






 到【灌水乐园】发言
到【灌水乐园】发言









