






WSL环境
- WSL安装ubuntu :win 10系统
查看可安装ubuntu版本:wsl --list -o
Ubuntu-18.04 Ubuntu 18.04 LTS
Ubuntu-20.04 Ubuntu 20.04 LTS
Ubuntu-22.04 Ubuntu 22.04 LTS
Ubuntu-24.04 Ubuntu 24.04 LTS
安装固定版本:wsl --install -d Ubuntu-20.04
- Vscode 连接WSL:
安装插件:
打开远程管理,上面选择WSL即可看到,点击后可连接。
代码编译
- 安装依赖
sudo apt-get update
sudo apt-get install -y git python3 python3-pip python-is-python3- 克隆ArduPilot仓库
git clone https://github.com/ArduPilot/ardupilot.git
cd ardupilot
git checkout -b Copter-4.1 remotes/origin/Copter-4.1
git submodule update --init --recursive- 安装ArduPilot依赖
Tools/environment_install/install-prereqs-ubuntu.sh -y
sudo apt install gcc-arm-none-eabi- 编译
./waf configure --debug
./waf copter仿真调试
- 安装gdb:sudo apt install gdb
- 打开vscode 调试部分进行配置
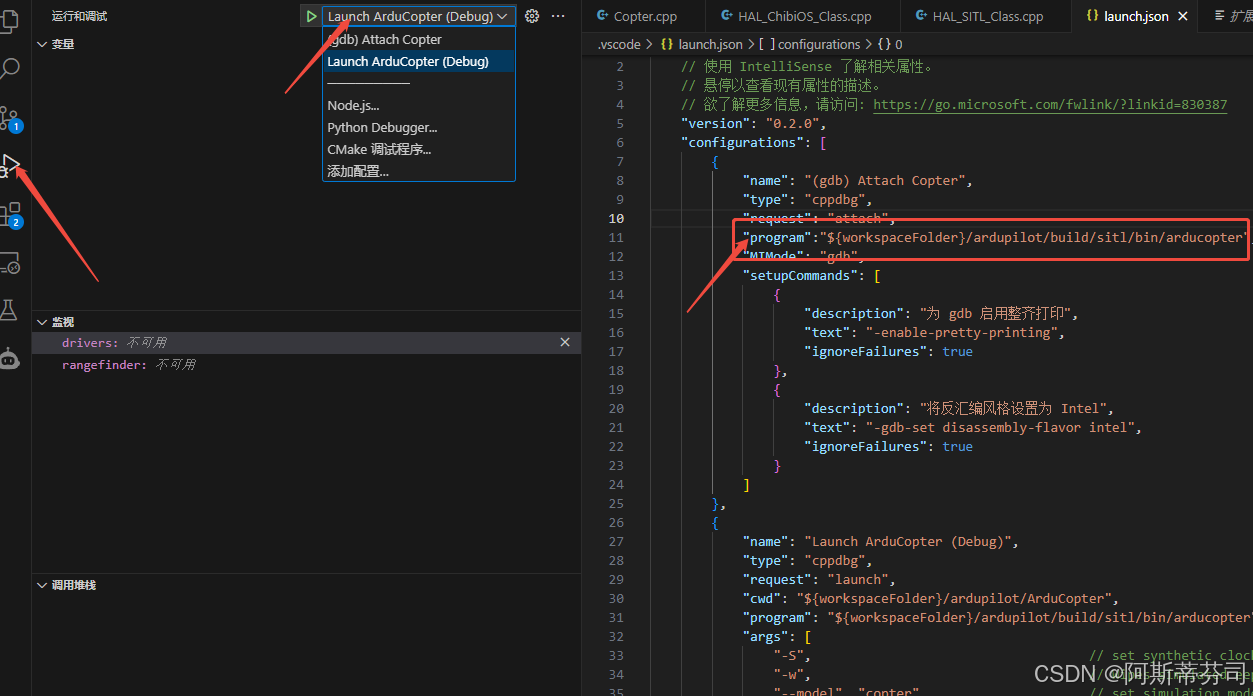
- 修改program部分:"program":"${workspaceFolder}/build/sitl/bin/arducopter"
- 配置文件可参考官方文档:Debugging with GDB using VSCode — Dev documentation
- 说明:配置中分为初始化和运行中两种调试
-
(gdb) Attach Copter 此模式需要提前开启STIL 开启STIL:./Tools/autotest/sim_vehicle.py -v ArduCopter --console --map -D 若需要查看初始化过程,可在窗口输入reboot (推荐) -
Launch ArduCopter (Debug) 此模式可调试初始化部分。
-


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









