



Timer
TP
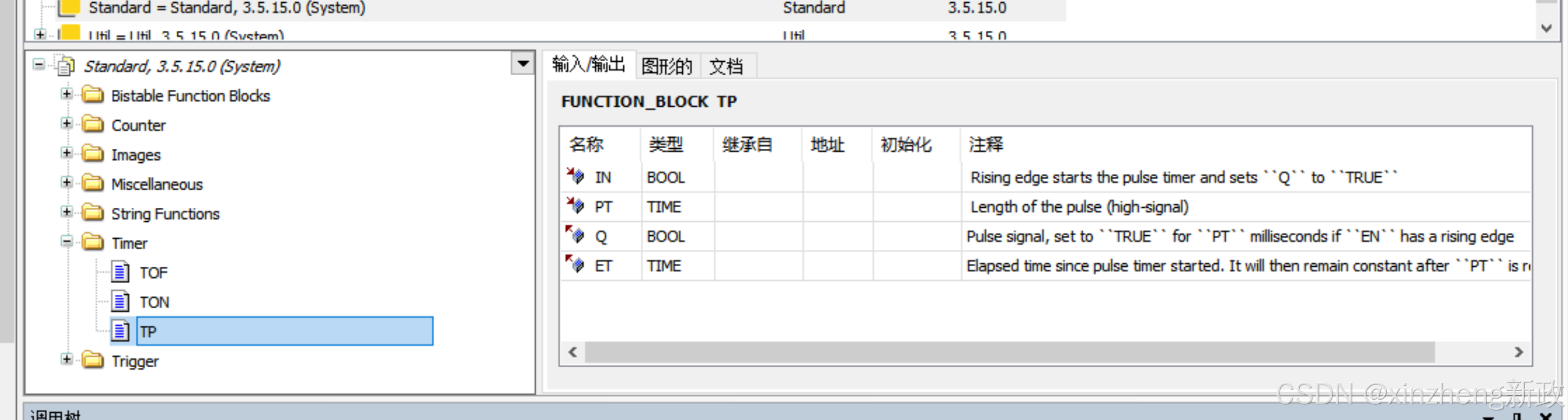
在提供的PLC编程环境截图(基于“bistable function blocks”库)中,TP 是一个脉冲定时器功能块,属于标准功能块的一部分。以下是关于 TP 的详细解释:
1. 功能概述
TP(Pulse Timer)是一个用于生成固定时长脉冲信号的功能块。当输入信号 IN 的上升沿触发时,TP 会立即将输出信号 Q 置为 TRUE,并在设定的脉冲时间 PT 到期后,自动将 Q 置为 FALSE。
2. 输入/输出参数
根据截图中的表格,TP 的参数如下:
| 参数 | 类型 | 说明 |
|---|---|---|
IN | BOOL | 输入信号。上升沿触发脉冲定时器,并将 Q 置为 TRUE。 |
PT | TIME | 脉冲时长(高电平持续时间)。单位为毫秒(ms)。 |
Q | BOOL | 输出信号。在 PT 时间内保持 TRUE,之后自动变为 FALSE。 |
ET | TIME | 内部计时值,表示从脉冲开始到当前的已过时间。PT 到期后,ET 停止更新。 |
3. 工作原理
- 触发条件:
- 当
IN从FALSE变为TRUE(上升沿)时,TP启动。 Q立即变为TRUE,并开始计时。
- 当
- 脉冲持续:
- 在
PT指定的时间内,Q保持TRUE。 ET实时更新为已过时间(从脉冲开始计算)。
- 在
- 脉冲结束:
- 当
ET达到PT时,Q自动变为FALSE。 ET停止更新,保持为PT的值(直到下一次触发)。
- 当
- 重复触发:
- 如果在
PT时间内IN再次出现上升沿,TP会重新启动,Q保持TRUE并重置计时。
- 如果在
4. 应用场景
- 短时信号控制:例如,按下按钮后短暂点亮指示灯。
- 设备单次启动:触发某个动作(如电机启动)后,自动停止。
- 安全逻辑:在危险信号触发后,短暂激活安全措施。
5. 示例代码(结构化文本)
PROGRAM PulseExample
VAR
TP_Instance : TP; // 声明TP功能块实例
Trigger : BOOL := FALSE; // 外部触发信号
PulseDuration : TIME := T#500MS; // 脉冲时长500ms
Output : BOOL; // 输出信号
END_VAR
// 调用TP功能块 durationn.持续,持续时间
TP_Instance(
IN := Trigger,
PT := PulseDuration,
Q => Output,
ET => // 可选:用于监控已过时间
);
行为说明:
- 当
Trigger变为TRUE时,Output立即变为TRUE,持续 500ms 后自动变为FALSE。
6. 注意事项
- 上升沿触发:
TP仅对IN的上升沿敏感,持续为TRUE不会重复触发。 - 时间单位:
PT的单位为TIME(如T#1S表示 1 秒)。 - 资源占用:
TP是轻量级功能块,适合高频触发场景。
总结
TP 是一个简单但实用的脉冲生成工具,适用于需要固定时长信号的场景。通过 IN 触发、PT 定时、Q 输出的逻辑,可以灵活控制设备的短时行为。
后龙门脉冲倍率
后龙门脉冲倍率(HLMScale) 是一个关键参数,用于将脉冲信号转换为实际物理运动量(如位移、速度等)。以下是详细解释:
1. 后龙门脉冲倍率的定义
-
HLMScale是一个DINT(双整数)类型的变量,表示后龙门(Rear Gantry)的脉冲倍率。 -
作用:将PLC发出的脉冲数转换为后龙门电机的实际运动量(如毫米、角度等)。
公式:
实际运动量=HLMScale脉冲数
或
脉冲数=实际运动量×HLMScale
2. 代码中的具体实现
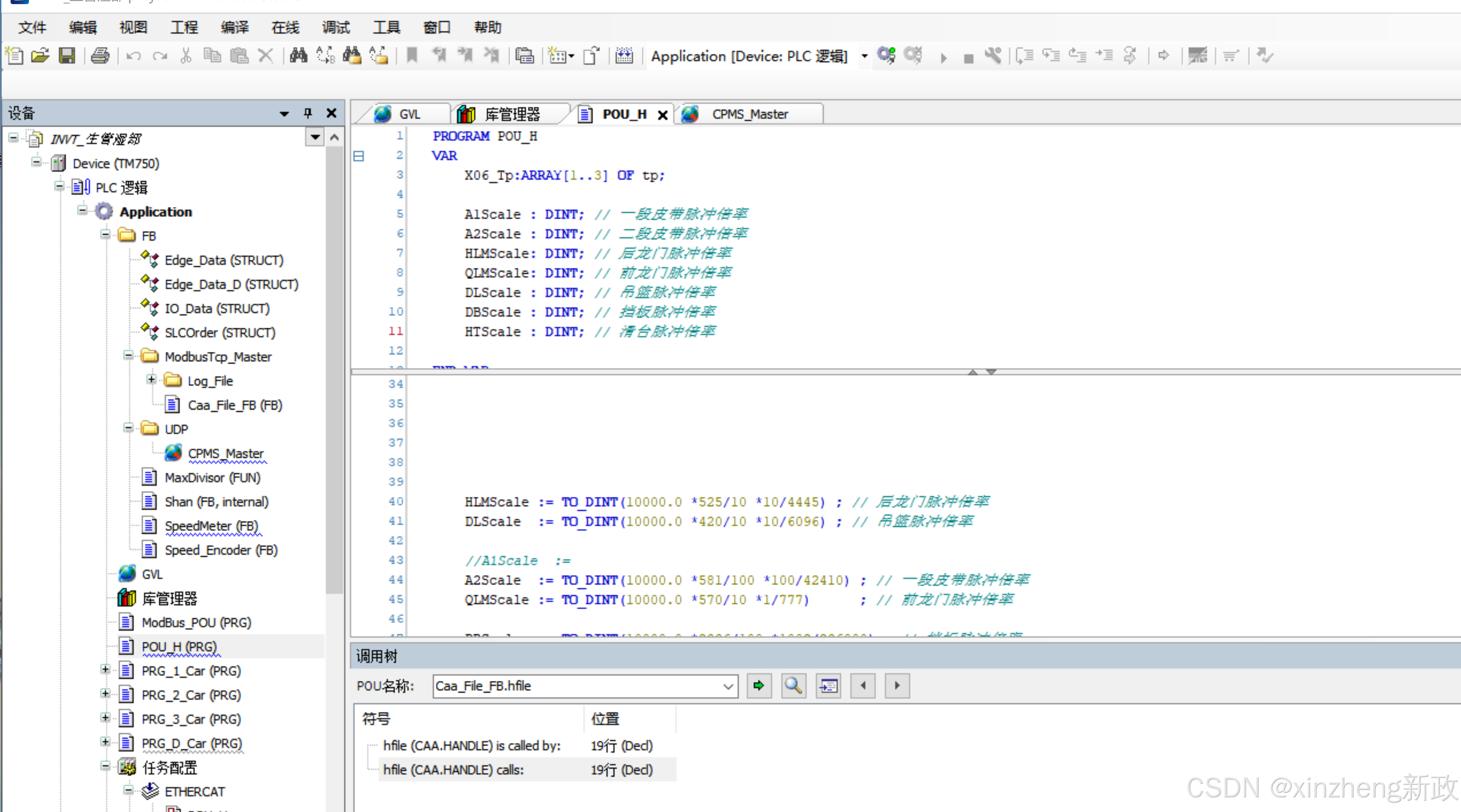
在截图的代码中,HLMScale 的赋值如下:
pascal
HLMScale := TO_DINT(10000.0 * 525 / 10 * 10 / 4445); // 后龙门脉冲倍率 |
计算逻辑解析
-
原始公式:
HLMScale=444510000.0×525×10×10
10000.0:可能是基础比例因子(如编码器分辨率或机械传动比)。525:可能与电机参数相关(如步进电机的步距角或伺服电机的电子齿轮比)。10 * 10:可能是额外的缩放因子(如减速机传动比或单位换算)。4445:分母,可能是机械系统的总传动比或脉冲当量。
- 实际意义:
- 该公式将机械参数(如电机步距、传动比)转换为PLC可用的脉冲倍率值。
- 最终结果通过
TO_DINT转换为整数类型,适配PLC的数值处理。
3. 后龙门脉冲倍率的应用场景
-
运动控制:
当PLC需要控制后龙门移动 X 毫米 时,会计算所需的脉冲数:
脉冲数=X×HLMScale
然后通过脉冲输出(如PWM或高速输出点)发送给驱动器。
-
位置反馈:
编码器反馈的脉冲数通过HLMScale转换为实际位置,用于闭环控制或监控。 -
动态调整:
如果机械系统参数变化(如更换减速机),只需修改HLMScale的值,无需重写控制逻辑。
4. 为什么需要脉冲倍率?
- 单位统一:PLC内部通常以脉冲数为单位,而实际工程中需要毫米、角度等物理单位。
- 硬件适配:不同电机、驱动器或机械结构的脉冲当量不同,需通过倍率统一。
- 灵活性:通过调整倍率值,可快速适配不同设备或工艺需求。
5. 类似参数对比
在代码中,还有其他脉冲倍率变量(如 A1Scale、A2Scale 等),它们的逻辑与 HLMScale 一致,但对应不同设备:
A1Scale:一段皮带脉冲倍率。A2Scale:二段皮带脉冲倍率。QLMScale:前龙门脉冲倍率。DLScale:吊篮脉冲倍率。
6. 调试与验证
-
理论计算:
根据机械参数(如电机步距角、传动比)手动计算脉冲倍率,与代码中的HLMScale对比。 -
实际测试:
-
发送固定脉冲数,测量后龙门的实际位移。
-
验证是否满足:
-
实际位移=HLMScale脉冲数
- HMI监控:
通过人机界面(HMI)实时显示HLMScale的值,便于操作员调整或诊断。
总结
HLMScale是后龙门运动控制的核心参数,用于脉冲与物理量的转换。- 其值由机械参数(如传动比、编码器分辨率)决定,并通过公式计算得出。
- 调整
HLMScale可快速适配不同设备或工艺需求,是运动控制灵活性的关键。
如果需要进一步分析机械参数或调试方法,可以提供更多上下文(如电机型号、传动结构)!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











