






Deep Learning 4 -正则化(防止过拟合)
数据
数据地址:ex5Data.zip
数据包含两个数据集,一个用作线性回归,一个用作逻辑回归。同时也包含了一个函数map_feature.m,该函数用在逻辑回归中。
数据绘制
加载ex5Linx.dat和ex5Liny.dat。对应于x和y变量。
注意,输入x为单特征,因而可以作出x的二维图。
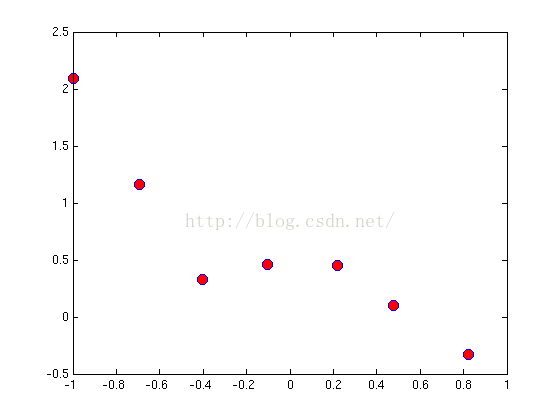
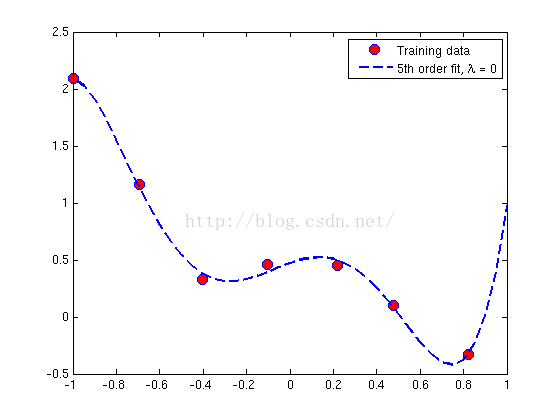
由上图可以看出,如果用一条直线拟合可能过于简单,因此,我们用一高阶的多项式以拟合更多的数据。如下:

这意味着我们假设有六个特征,因为x0,x1,…x5是我们回归所用的特征。注意到即使使用了多项式进行拟合,这仍然是一线性回归问题,因为每个特征都假设是线性的。正则问题中,最小化损失函数为:
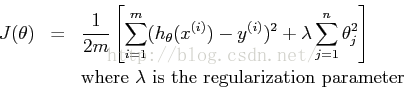
正则化参数λ是控制拟合程度的参数。由于适应性参数的增加,会对损失函数有一增加量。这个增加量与λ 和参数的平方有关。因此,λ项中不包含θ0。
一般方程
用一般方程可得到最佳参数,表达式如下:
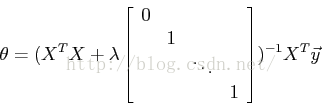
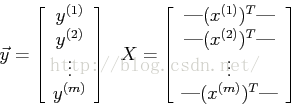
λ项后的矩阵是(n+1)*(n+1)维,如上,(n是特征维度,不含截距项),y和矩阵x有相同的非正则回归的定义:
使用上述方程,利用下述不同的λ值求θ值:
1. λ为0;
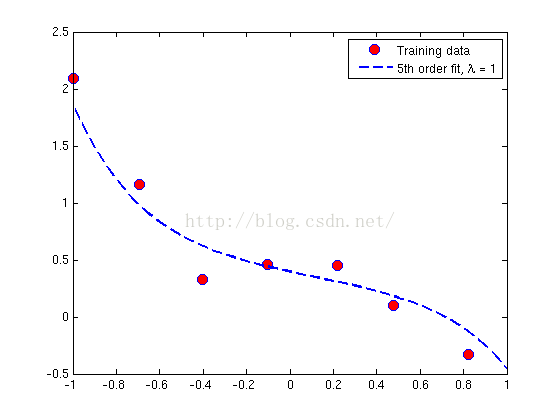
2. λ为1;
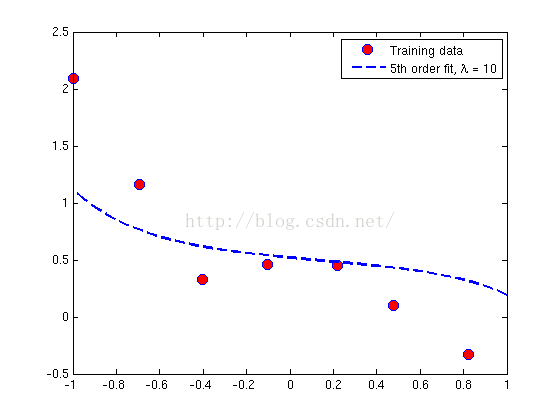
3. λ为10;
求解时,X是m*n+1为矩阵,因为有m组训练数据和n个特征,加上一截距项x0=1。第一列为1,其他列为相应的几次方,matlab中,
x = [ones(m, 1), x, x.^2, x.^3, x.^4, x.^5];当求得θ值,除了列出θ向量中的元素θj外,也列出了θ的L2范数来确保求解的正确。Matlab中,可用norm(x)求范数。作图如下:
逻辑回归模型的正则化
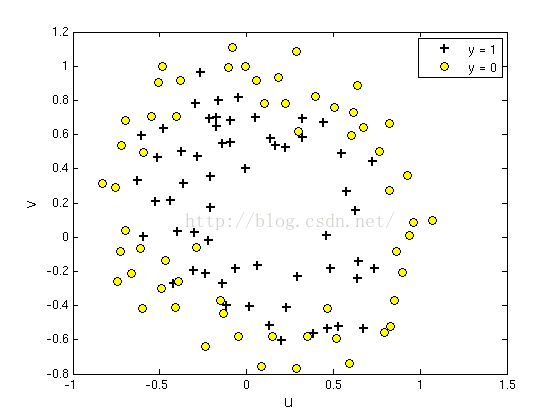
第二部分的联系是用牛顿法求解正则化逻辑回归模型。首先,加载ex5Logx.dat和ex5logy.dat。这个数据集代表了逻辑回归问题的两个特征。为了和前面的进行区别,两个特征定义为u,v,因此在数据ex5Logx.dat中,第一列为u,作图时可作为横轴,第二列为v,可作为纵轴。
Matlab如下:
x = load('ex5Logx.dat'); y = load('ex5Logy.dat'); figure % Find the indices for the 2 classespos = find(y); neg = find(y == 0); plot(x(pos, 1), x(pos, 2), '+')hold onplot(x(neg, 1), x(neg, 2), 'o')效果如下:
逻辑回归中的函数为:
将参数θTx作为sigmod函数参数g(θTx)。
x为u、v由0-6次方组成:
因此,x有28个特征。
u是第一列,v是第二列。以后,x指的是x0,x1,而不是u,v。
为了节省x各项枚举的时间,Matlab中我们定义了函数'map_feature',能够使原始的输入映射到特征向量。这个函数适用于单独的训练样本和整个训练集。调用时
x = map_feature(u, v)
正则化逻辑回归模型的损失函数为:

下面用牛顿法最小化函数。
牛顿法
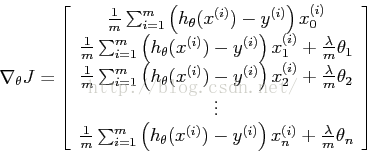
更新规则为

同非正则逻辑回归模型的牛顿法更新规则一直,但是现在要处理正则项,
 和Hessian矩阵H如下:
和Hessian矩阵H如下:

如果λ为0,则同非正则的逻辑回归模型。
1. xi为特征向量,28维;
2.  为28维向量;
为28维向量;
3. xi*(xi)T和H为28*28矩阵;
4. yi和 为标量;
为标量;
5. 在非正则项中,后面的对角阵为28*28维;
下面运行牛顿法:
1. λ为0;
2. λ为1;
3. λ为10;
为了确定时候收敛,每次迭代时记录J(θ)值。
收敛后,利用θ值求分类边缘。即:

Matlab中:
% Define the ranges of the grid
u = linspace(-1, 1.5, 200);
v = linspace(-1, 1.5, 200);
% Initialize space for the values to be plotted
z = zeros(length(u), length(v));
% Evaluate z = theta*x over the grid
for i = 1:length(u)
for j =1:length(v)
%Notice the order of j, i here!
z(j,i) = map_feature(u(i), v(j))*theta;
end
end
% Because of the way that contour plotting works
% in Matlab, we need to transpose z, or
% else the axis orientation will be flipped!
z = z'
% Plot z = 0 by specifying the range [0, 0]
contour(u,v,z, [0, 0], 'LineWidth', 2)
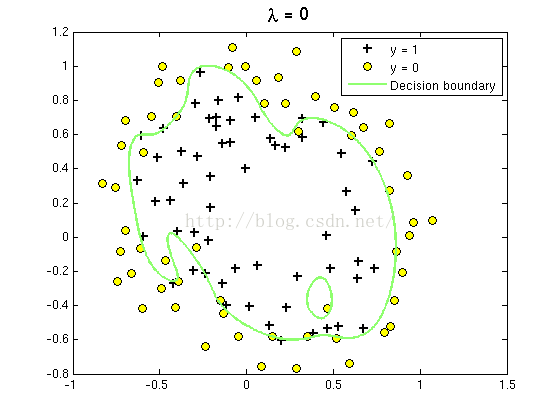
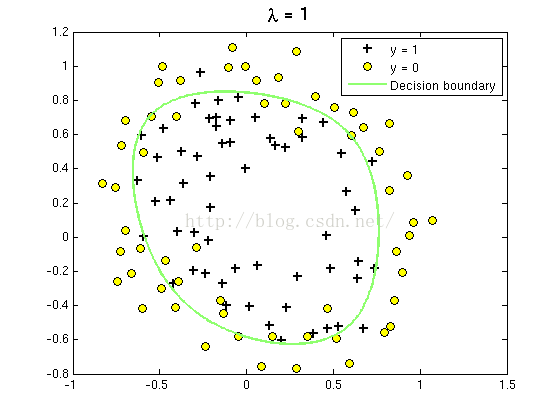
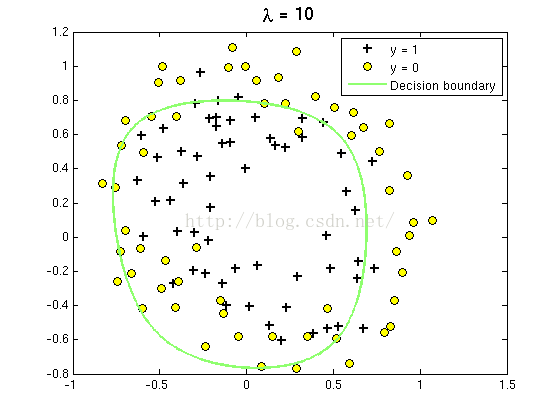
如下图:
由于有28个θ,将不显示结果的比对。但是可以用气2范数进行比对。
解决方案
一般解:
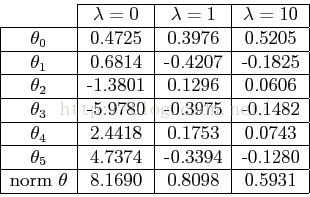
随着λ增加,θ范数减小。这是由于λ越大,对较大的拟合参数惩罚大。
在第一幅途中,λ=0,意味着非正则线性回归。由于目标优化过程中仅最小化平方误差,这个曲线对于数据很合适,但并不能很好的反应一般趋势,是一种过拟合。
第二幅图显示过拟合减小在正则化参数增加到1后。由于过拟合的函数仍然是5阶多项式,因此曲线比第一幅图更简单。
第三幅图显示λ值过大。显示为少拟合,曲线并不遵从点的方向趋势。
牛顿法解:
下图是在牛顿法收敛后θ的范数。λ为0时经过15次迭代后收敛,在为1或10时经过5次迭代后收敛:

随着λ的增加,θ范数减小。在λ为0的途中,算法边缘拟合精度高,单仍然有1个点误判。这对于一般的分类来说精度过高。
λ为1时,图中显示了一个较小精度的边缘,该边缘仍然能够很好区分正负。
λ为10时,正则项过于高,导致边缘并不准确。

















 745
745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









