



 本文介绍使用极限数据恢复软件从清空的回收站中恢复照片的步骤。首先下载并运行软件,选择需要扫描的磁盘,等待扫描完成。找到的文件位于特殊目录下,勾选所需文件进行恢复。注意避免在恢复前写入新数据。
本文介绍使用极限数据恢复软件从清空的回收站中恢复照片的步骤。首先下载并运行软件,选择需要扫描的磁盘,等待扫描完成。找到的文件位于特殊目录下,勾选所需文件进行恢复。注意避免在恢复前写入新数据。
从回收站删除是很常见的数据恢复故障。回收站清空的照片怎么恢复接下来我们还需要了解下具体如何恢复从回收站删除的资料,具体请看正文了解。
工具/软件:极限数据恢复软件
步骤1:先百度搜索并下载程序打开后,在软件中,选择需要恢复的盘,软件就会这个盘扫描。
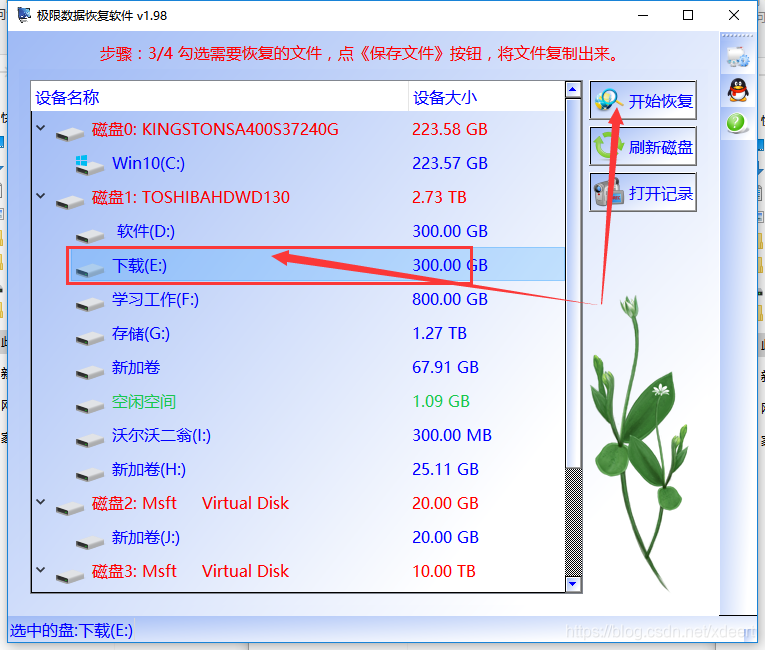
步骤2:等程序扫描完毕,大概需要几分钟时间。

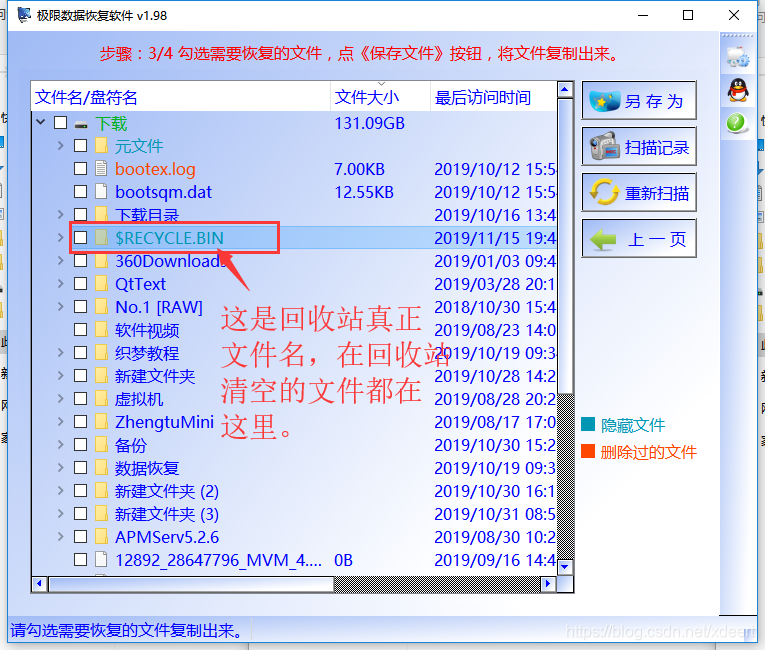
步骤3:软件找到资料后,都在《RECYCLE.BIL》或《RECYCLE.BIL》或《RECYCLE.BIL》或《RECYCLE》中($RECYCLE这个文件是回收站在里面的真正文件名)。
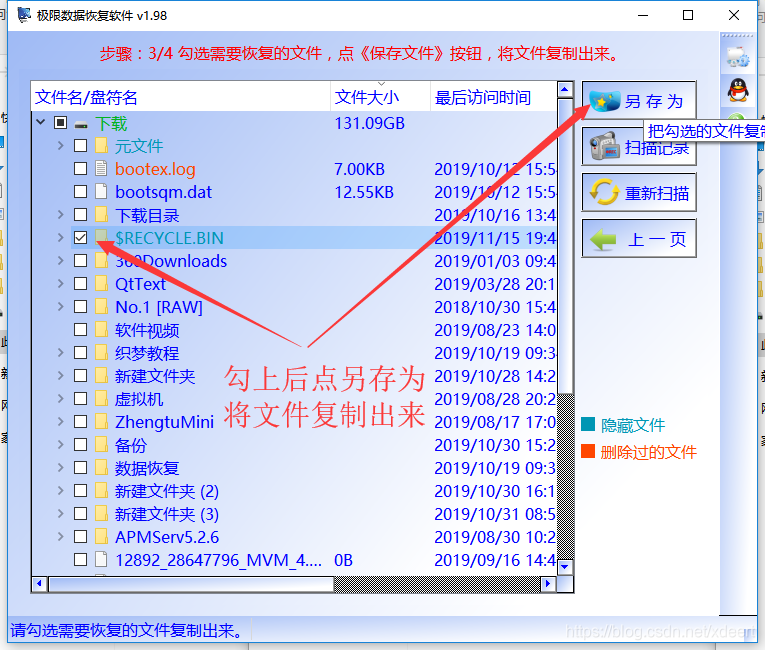
步骤4:将需要恢复的资料勾选,右击选择《复制选中的文件》,软件会将勾选的文件COPY出来。
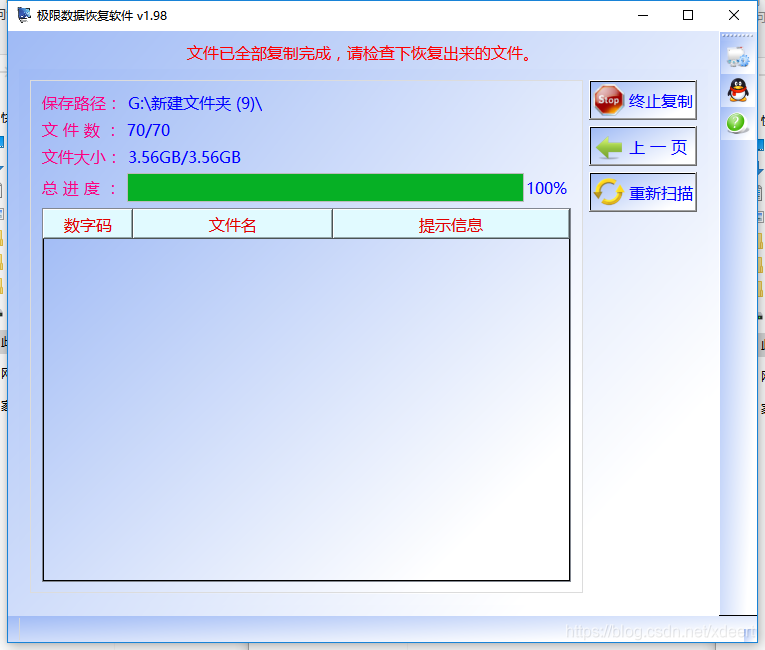
步骤5:坐等程序将数据复制完成就可以了 。
注意事项1:想要恢复清空回收站需要注意,一定注意不要往误删文件所在的盘存入新的文件。
注意事项2:文件误删除恢复出来的数据需要暂时保存到其它盘里。

















 5045
5045

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









