



 本文介绍了一种通过脚本自动安装虚拟机的方法。在真机上创建并配置安装脚本vm_create.sh,并在虚拟机中使用kickstart进行配置,最后通过简单的命令即可启动虚拟机的自动安装过程。
本文介绍了一种通过脚本自动安装虚拟机的方法。在真机上创建并配置安装脚本vm_create.sh,并在虚拟机中使用kickstart进行配置,最后通过简单的命令即可启动虚拟机的自动安装过程。
###脚本自动安装##
1.在真机中:
vim vm_create.sh
写入:
#!/bin/bash
virt-install \
--name $1 \
--ram 1024 \
--cpus 1 \
--disk /var/lib/libvirt/images/$1.qcow2,size=8,bus=virtio \
--location http://172.25.254.70/source7.2 \
--network source=br0,model=virtio \
%packages
@base ##基本信息指定
lftp
1.在真机中:
vim vm_create.sh
写入:
#!/bin/bash
virt-install \
--name $1 \
--ram 1024 \
--cpus 1 \
--disk /var/lib/libvirt/images/$1.qcow2,size=8,bus=virtio \
--location http://172.25.254.70/source7.2 \
--network source=br0,model=virtio \
--extra-args "ks=http://172.25.254.120/ks.cfg" &

2.在虚拟机中:
(1)yum install system-config-kickstart.noarch
system-config-kickstart ###打开kickstart configurator
####设置root密码###(最下面两个选项要打勾)

####选择安装源###

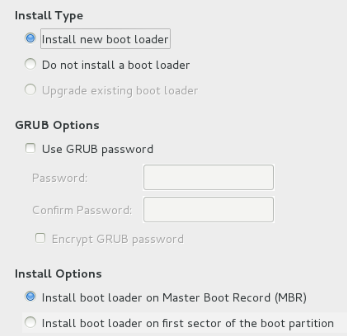
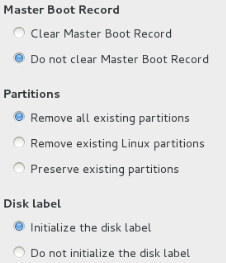
###选择安装类型###
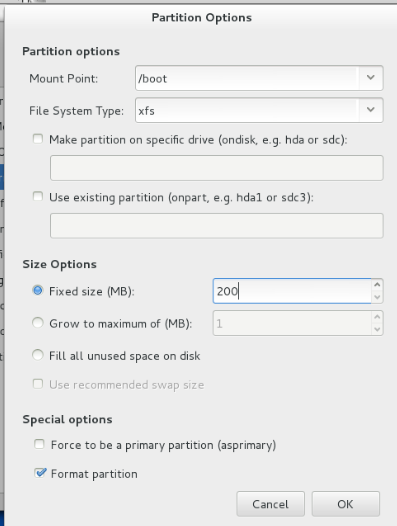
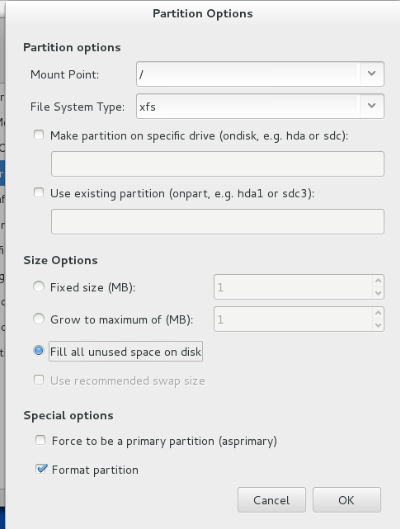
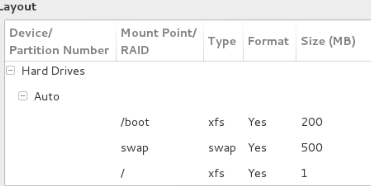
###添加分区###

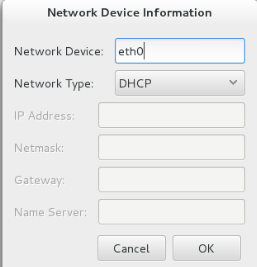
###设置网络类型及名称
####火墙设置成Disabled


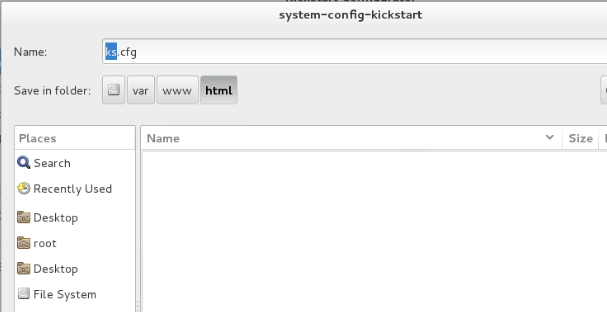
###全部设置好后点击左上角file,选择save保存,选择file system将其保存到/var/www/html里
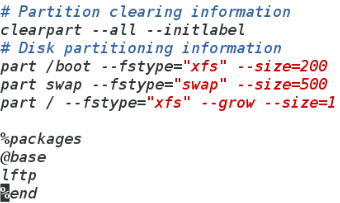
vim ks.cfg

%packages
@base ##基本信息指定
lftp
%end
3.在真机中:
cd /mnt
sh vm_create.sh xbw ###就可以自动安装一个名叫xbw的虚拟机

















 4853
4853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









