



 博客围绕程序员相关话题展开,提及互联网寒冬下程序员突围、Flutter 1.7正式版发布及混合开发框架对比。还重点讨论了职场中成为领导嫡系的问题,网友各抒己见,最后指出成为嫡系要正直靠谱,选对领导,此外还介绍了知识星球和学习资源获取途径。
博客围绕程序员相关话题展开,提及互联网寒冬下程序员突围、Flutter 1.7正式版发布及混合开发框架对比。还重点讨论了职场中成为领导嫡系的问题,网友各抒己见,最后指出成为嫡系要正直靠谱,选对领导,此外还介绍了知识星球和学习资源获取途径。
热文导读| 点击标题阅读
在职场中领导想要做成一件事情,如果没有自己下属的鼎力支持,行动起来确实有点太不方便。实话实说,每个领导都需要嫡系。这不某网友开始吐槽了:在阿里,成为领导嫡系真是好,晋升,评绩效奖金,都能被照顾。那么问题来了,如何才能成为领导嫡系呢,有没有人传授一下经验。认真负责,办事能力强,专业知识丰富就行了嘛?
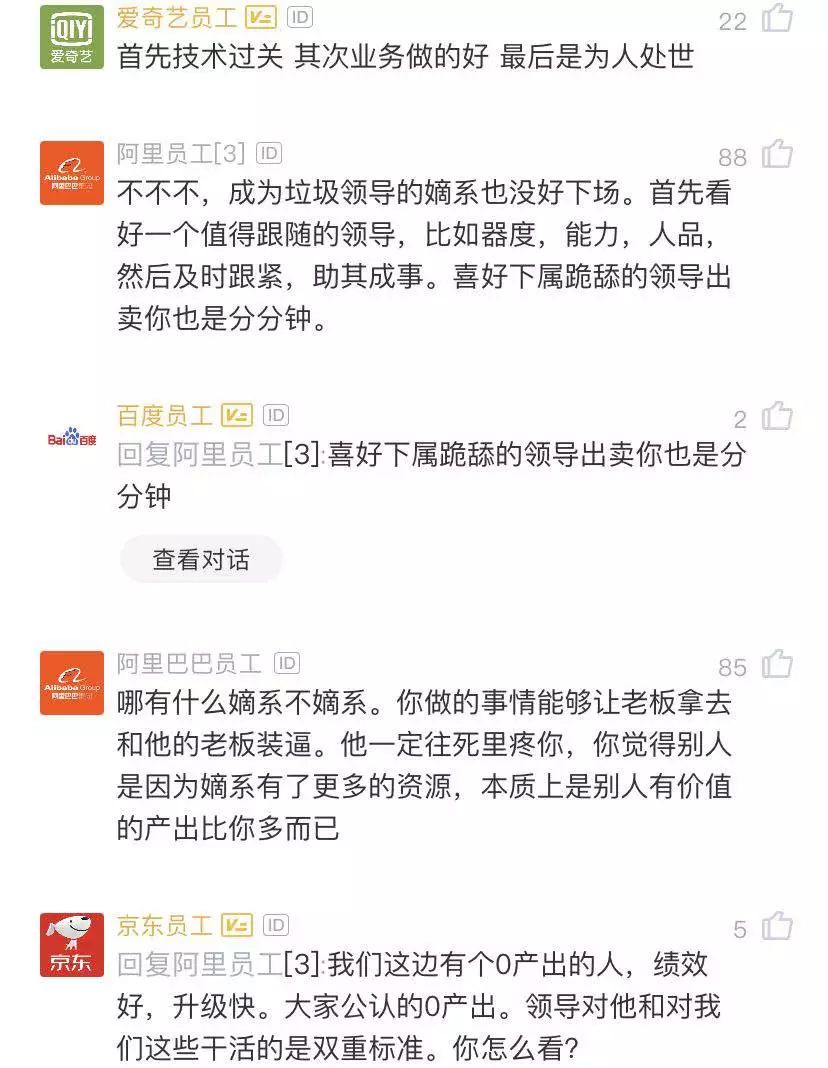
有网友说要想成为嫡系,一来跪舔,二来确实要有实力,有实力&肯配合。。。毕竟不是体制单位,产出还是要有的。还有说好好做事,及时响应领导,做好这两点基本就没问题了。更有人说:跟领导的利益关联了你就是嫡系。说白了,要想成为领导嫡系,首先技术过关,其次业务做的好,最后是为人处世。这不就有网友说了:老板喜欢能帮他解决问题带来好处的人。老板也有kpi的。

还有网友持不同意见:哪有什么嫡系不嫡系。你做的事情能够让老板拿去和他的老板装逼。他一定往死里疼你,你觉得别人是因为嫡系有了更多的资源,本质上是别人有价值的产出比你多而已。也有人说:不不不,成为垃圾领导的嫡系也没好下场。首先看好一个值得跟随的领导,比如器度,能力,人品,然后及时跟紧,助其成事。喜好下属跪舔的领导出卖你也是分分钟。更有网友说:好领导可以给你机会,烂领导出卖你的样子跟当初捧你的样子一模一样。
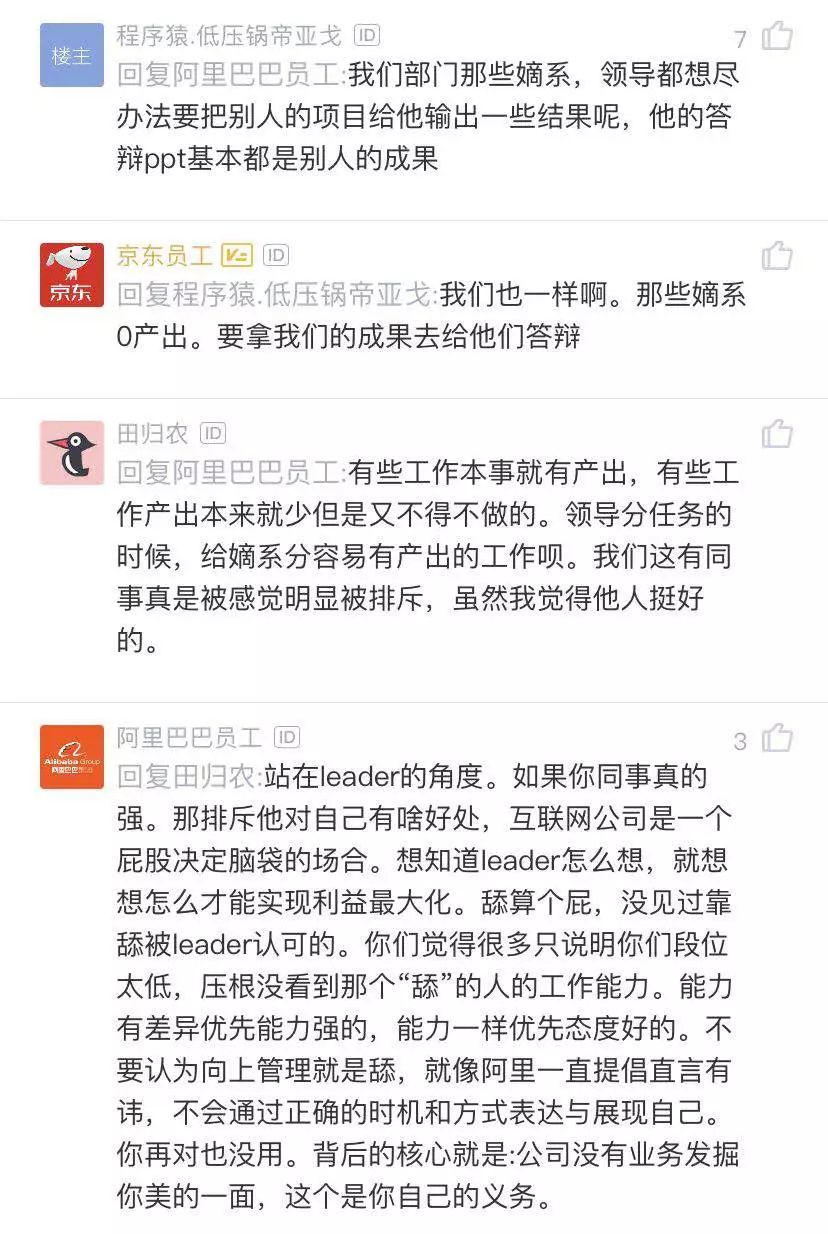
持中立意见的网友说:有些工作本身就有产出,有些工作产出本来就少但是又不得不做的。领导分任务的时候,给嫡系分容易有产出的工作呗。我们这有同事真是被感觉明显被排斥,虽然我觉得他人挺好的。
站在leader的角度。如果你同事真的强。那排斥他对自己有啥好处,互联网公司是一个屁股决定脑袋的场合。想知道leader怎么想,就想想怎么才能实现利益最大化。舔算个屁,没见过靠舔被leader认可的。你们觉得很多不合理,只说明你们段位太低,压根没看到那个“舔”的人的工作能力。能力有差异,优先能力强的,能力一样,优先态度好的。不要认为向上管理就是舔,就像阿里一直提倡直言有讳,不会通过正确的时机和方式表达与展现自己,你再对也没用。背后的核心就是:公司没有义务发掘你美的一面,这个是你自己的义务。
最后,要想成为嫡系首先要正直,把正确的事情做正确,让领导觉得你靠谱。另外,如果领导不努力,只是为了保自己的头衔,这种领导,你跟随也没有好处。要想别人成为你的贵人,最开始自己要先成为自己的贵人。
更多学习和讨论,欢迎加入我们的知识星球,这里有1000+小伙伴,让你的学习不寂寞~·
看完本文有收获?请转发分享给更多人
我们的知识星球第三期开期了,已达到1100人了,能连续做三期已很不容易了,有很多老用户续期,目前续期率达到50%,说明了大家对我们的知识星球还是很认可的,欢迎大家加入尽早我们的知识星球,更多星球信息参见:
说两件事

微信扫描或者点击上方二维码领取的Android \ Python的\ AI \的Java等高级进阶资源
更多学习资料点击下面的“阅读原文 ”获取

谢谢老板,点个好看↓

















 770
770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









