







 本文介绍了基于STM32的超声波测距原理和实现方法。通过初始化TIM3定时器,利用超声波传感器的TRIG和ECHO引脚进行测距,代码中设置了超声波两次读取的最小间隔,并提供了初始化引脚和获取距离的函数。在中断服务程序中处理超声波回波时间的计算,最终将时间转换为距离。该系统适用于物联网设备中的短距离测量应用。
本文介绍了基于STM32的超声波测距原理和实现方法。通过初始化TIM3定时器,利用超声波传感器的TRIG和ECHO引脚进行测距,代码中设置了超声波两次读取的最小间隔,并提供了初始化引脚和获取距离的函数。在中断服务程序中处理超声波回波时间的计算,最终将时间转换为距离。该系统适用于物联网设备中的短距离测量应用。
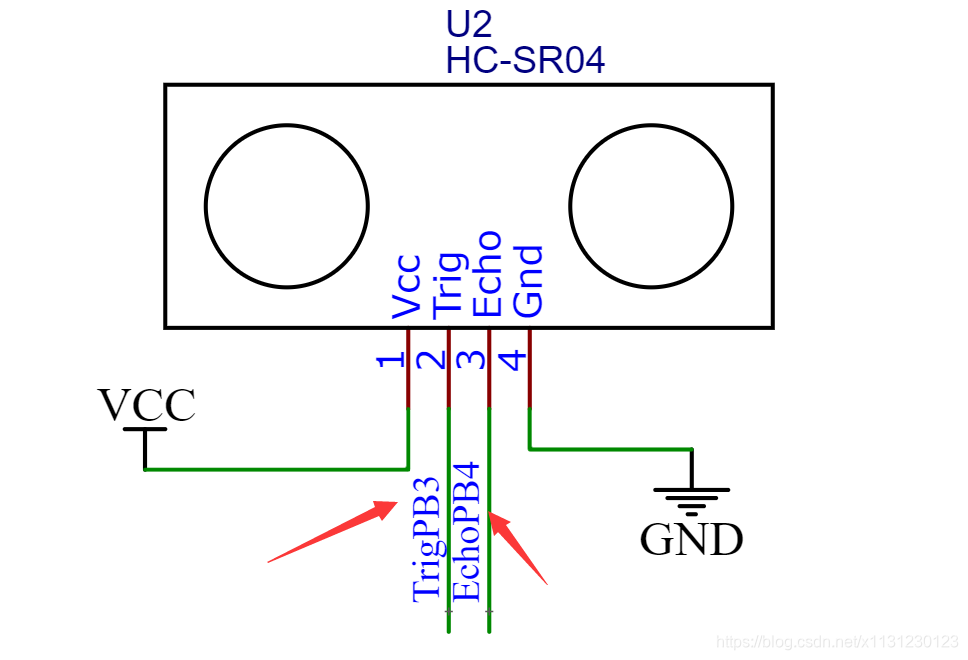
原理图:
代码使用方法:
1 需要初始化引脚:init_sr04_pin();
2 在循环中,不断调用 distance_sr04=get_distance(); 获得距离。单位是毫米。
注意:超声波两次读取间隔应该大于75ms,好像以前在超声波模块说明书里见过如此的说明。
注意:代码里用了TIM3定时器。
代码:
unsigned int distance_sr04; /* 距离 单位是毫米 */
char over_flow_sr04 = 0; 
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









