







首先是fit,是最常用的也是最基础的。
**
fit() 以固定数量的轮次(数据集上的迭代)训练模型。
**
fit(x=None, y=None, batch_size=None, epochs=1, verbose=1, callbacks=None, validation_split=0.0, validation_data=None, shuffle=True, class_weight=None, sample_weight=None, initial_epoch=0, steps_per_epoch=None, validation_steps=None)
这是fit的官方参数解释,其中很多我们都不需要,只需要关注最常用的就行了。其余的在以后的学习中你自己就会明白了。
**
参数
**
x: 训练数据的 Numpy 数组。 如果模型中的输入层被命名,你也可以传递一个字典,将输入层名称映射到 Numpy 数组。 如果从本地框架张量馈送(例如 TensorFlow 数据张量)数据,x 可以是 None(默认)。
y: 目标(标签)数据的 Numpy 数组。 如果模型中的输出层被命名,你也可以传递一个字典,将输出层名称映射到 Numpy 数组。 如果从本地框架张量馈送(例如 TensorFlow 数据张量)数据,y 可以是 None(默认)。
batch_size: 整数或 None。每次提度更新的样本数。如果未指定,默认为 32.
epochs: 整数。训练模型迭代轮次。一个轮次是在整个 x 或 y 上的一轮迭代。请注意,与 initial_epoch 一起,epochs 被理解为 「最终轮次」。模型并不是训练了 epochs 轮,而是到第 epochs 轮停止训练。
verbose: 0, 1 或 2。日志显示模式。 0 = 安静模式, 1 = 进度条, 2 = 每轮一行。
callbacks: 一系列的 keras.callbacks.Callback 实例。一系列可以在训练时使用的回调函数。详见 callbacks。
validation_split: 在 0 和 1 之间浮动。用作验证集的训练数据的比例。模型将分出一部分不会被训练的验证数据,并将在每一轮结束时评估这些验证数据的误差和任何其他模型指标。验证数据是混洗之前 x 和y 数据的最后一部分样本中。
validation_data: 元组 (x_val,y_val) 或元组 (x_val,y_val,val_sample_weights),用来评估损失,以及在每轮结束时的任何模型度量指标。模型将不会在这个数据上进行训练。这个参数会覆盖 validation_split。
shuffle: 布尔值(是否在每轮迭代之前混洗数据)或者 字符串 (batch)。batch 是处理 HDF5 数据限制的特殊选项,它对一个 batch 内部的数据进行混洗。当 steps_per_epoch 非 None 时,这个参数无效。
class_weight: 可选的字典,用来映射类索引(整数)到权重(浮点)值,用于加权损失函数(仅在训练期间)。这可能有助于告诉模型 「更多关注」来自代表性不足的类的样本。
sample_weight: 训练样本的可选 Numpy 权重数组,用于对损失函数进行加权(仅在训练期间)。您可以传递与输入样本长度相同的平坦(1D)Numpy 数组(权重和样本之间的 1:1 映射),或者在时序数据的情况下,可以传递尺寸为 (samples, sequence_length) 的 2D 数组,以对每个样本的每个时间步施加不同的权重。在这种情况下,你应该确保在 compile() 中指定 sample_weight_mode=“temporal”。
initial_epoch: 开始训练的轮次(有助于恢复之前的训练)。
steps_per_epoch: 在声明一个轮次完成并开始下一个轮次之前的总步数(样品批次)。使用 TensorFlow 数据张量等输入张量进行训练时,默认值 None 等于数据集中样本的数量除以 batch 的大小,如果无法确定,则为 1。
validation_steps: 只有在指定了 steps_per_epoch时才有用。停止前要验证的总步数(批次样本)。
返回
一个 History 对象。其 History.history 属性是连续 epoch 训练损失和评估值,以及验证集损失和评估值的记录(如果适用)。
异常
RuntimeError: 如果模型从未编译。
ValueError: 在提供的输入数据与模型期望的不匹配的情况下。
X,Y为输入输出,也即待训练的数据,这是必须有的,batch_size是每次喂入模型的数据量,即你有一大批的数据,一个一个传入模型会浪费大量的时间,同时,会导致学习准确率在一个范围内震荡,全部传入会导致模型忽视掉一部分的数据细节,就跟招聘一样,一个一个看太浪费时间,一下全部面完又容易漏掉人才,所以batch_size就是把数据分批送入模型,这是一种比较好的方式,也是一种折中。
epochs就是全部的数据需要被轮多少次。即训练的次数。
verbose是训练过程中打印出来的进程的模式,这个可以随意设置0、1、2读者可以自己试试效果,选择自己喜欢的就好。
**
fit_generator 使用 Python 生成器或 Sequence 实例逐批生成的数据,按批次训练模型。
**
fit_generator(generator, steps_per_epoch=None, epochs=1, verbose=1, callbacks=None, validation_data=None, validation_steps=None, class_weight=None, max_queue_size=10, workers=1, use_multiprocessing=False, shuffle=True, initial_epoch=0)
参数
generator: 一个生成器或 Sequence (keras.utils.Sequence) 对象的实例,以避免在使用多进程时出现重复数据。 生成器的输出应该为以下之一:
一个 (inputs, targets) 元组
一个 (inputs, targets, sample_weights) 元组。 这个元组(生成器的单个输出)表示一个独立批次。因此,此元组中的所有数组必须具有相同的长度(等于此批次的大小)。不同的批次可能具有不同的大小。例如,如果数据集的大小不能被批量大小整除,则最后一批时期通常小于其他批次。生成器将无限地在数据集上循环。当运行到第 steps_per_epoch 时,记一个 epoch 结束。
steps_per_epoch: 整数。在声明一个 epoch 完成并开始下一个 epoch 之前从 generator 产生的总步数(批次样本)。它通常应该等于你的数据集的样本数量除以批量大小。可选参数 Sequence:如果未指定,将使用 len(generator) 作为步数。
epochs: 整数,数据的迭代总轮数。一个 epoch 是对所提供的整个数据的一轮迭代,由 steps_per_epoch 所定义。请注意,与 initial_epoch 一起,参数 epochs 应被理解为 「最终轮数」。模型并不是训练了 epochs 轮,而是到第 epochs 轮停止训练。
verbose: 日志显示模式。0,1 或 2。0 = 安静模式,1 = 进度条,2 = 每轮一行。
callbacks: keras.callbacks.Callback 实例列表。在训练时调用的一系列回调。详见 callbacks。
validation_data: 它可以是以下之一:
验证数据的生成器或 Sequence 实例
一个 (inputs, targets) 元组
一个 (inputs, targets, sample_weights) 元组。
validation_steps: 仅当 validation_data 是一个生成器时才可用。 每个 epoch 结束时验证集生成器产生的步数。它通常应该等于你的数据集的样本数量除以批量大小。可选参数 Sequence:如果未指定,将使用 len(generator) 作为步数。
class_weight: 可选的字典,用来映射类索引(整数)到权重(浮点)值,用于加权损失函数(仅在训练期间)。这可能有助于告诉模型 「更多关注」来自代表性不足的类的样本。
max_queue_size: 整数。生成器队列的最大尺寸。如果未指定,max_queue_size 将默认为 10。
workers: 整数。使用基于进程的多线程时启动的最大进程数。如果未指定,worker 将默认为 1。如果为 0,将在主线程上执行生成器。
use_multiprocessing: 如果 True,则使用基于进程的多线程。如果未指定,use_multiprocessing 将默认为 False。请注意,因为此实现依赖于多进程,所以不应将不可传递的参数传递给生成器,因为它们不能被轻易地传递给子进程。
shuffle: 布尔值。是否在每轮迭代之前打乱 batch 的顺序。只能与 Sequence (keras.utils.Sequence) 实例同用。在 steps_per_epoch 不为 None 是无效果。
initial_epoch: 整数。开始训练的轮次(有助于恢复之前的训练)。
返回
一个 History 对象。其 History.history 属性是连续 epoch 训练损失和评估值,以及验证集损失和评估值的记录(如果适用)。
异常
ValueError: 如果生成器生成的数据格式不正确。
例子
def generate_arrays_from_file(path):
while True:
with open(path) as f:
for line in f:
# 从文件中的每一行生成输入数据和标签的 numpy 数组
x1, x2, y = process_line(line)
yield ({‘input_1’: x1, ‘input_2’: x2}, {‘output’: y})
model.fit_generator(generate_arrays_from_file(’/my_file.txt’),
steps_per_epoch=10000, epochs=10)
重要的参数就是generator,这个是需要自己写的数据分批程序,大家就要问了?fit() 函数不是有batch_size参数吗,不是可以自己分批处理吗?
答案就是:
当你使用.fit()函数时,意味着如下两个假设:
训练数据可以 完整地 放入到内存(RAM)里
数据已经不需要再进行任何处理了
这两个原因解释的非常好,之前我运行程序的时候,由于数据集太大(实际中的数据集显然不会都像 TensorFlow 官方教程里经常使用的 MNIST 数据集那样小),一次性加载训练数据到fit()函数里根本行不通。就是你的电脑不允许你用fit() 函数了。
于是就有generator() 函数(自己编写的程序)先处理数据。那么什么时候用fit_generator()函数呢?
答案就是:
内存不足以一次性加载整个训练数据的时候
需要一些数据预处理(例如旋转和平移图片、增加噪音、扩大数据集等操作)
在生成batch的时候需要更多的处理
**
还有steps_per_epoch参数,从意思上来说就是每个周期训练的步数。通常为steps_per_epoch=总数据量/batch_size
train_on_batch() 一批样品的单次梯度更新。
**
参数
x: 训练数据的 Numpy 数组,如果模型具有多个输入,则为 Numpy 数组列表。如果模型中的所有输入都已命名,你还可以传入输入名称到 Numpy 数组的映射字典。
y: 目标数据的 Numpy 数组,如果模型具有多个输入,则为 Numpy 数组列表。如果模型中的所有输出都已命名,你还可以传入输出名称到 Numpy 数组的映射字典。
sample_weight: 训练样本的可选 Numpy 权重数组,用于对损失函数进行加权(仅在训练期间)。 您可以传递与输入样本长度相同的平坦(1D)Numpy 数组(权重和样本之间的 1:1 映射),或者在时序数据的情况下,可以传递尺寸为 (samples, sequence_length) 的 2D 数组,以对每个样本的每个时间步施加不同的权重。在这种情况下,你应该确保在 compile() 中指定 sample_weight_mode=“temporal”。
class_weight: 可选的字典,用来映射类索引(整数)到权重(浮点)值,用于加权损失函数(仅在训练期间)。这可能有助于告诉模型 「更多关注」来自代表性不足的类的样本。
返回
标量训练误差(如果模型只有单个输出且没有评估指标)或标量列表(如果模型具有多个输出和/或指标)。 属性 model.metrics_names 将提供标量输出的显示标签。
train_on_batch()也是分批次进行训练。
那么三者在在程序上有哪些区别呢?
下面是fit() 的程序用法:
model.fit(x_data,y_data, epochs=1000, batch_size=10)
下面是fit_generator()的程序用法:
model.fit_generator(generator(x_data,y_data,10),steps_per_epoch=10,epochs=1000, verbose=1)
下面是train_on_batch()的程序用法:
for step in range(1001):
cost=model.train_on_batch(x_data,y_data)
这三者的程序运行出来是等价的
主体程序如下:
这是线性回归的程序,用于大家理解这三个函数。
import keras
import numpy as np
import matplotlib.pyplot as plt
from keras.models import Sequential
from keras.layers import Dense
#使用numpy生成100个随即点
np.random.seed(3)
x_data=np.random.rand(100)
noise=np.random.normal(0,0.01,x_data.shape)
y_data=x_data*0.1+0.2+noise#加入噪声,便于线性回归
#显示随即点
plt.scatter(x_data,y_data)
plt.show()
#构建一个顺序模型
model=Sequential()
#再模型中天界一个全链接层
model.add(Dense(units=1,input_dim=1))
model.compile(optimizer='sgd',loss='mse')
def generator(x_data,y_data,size):
while True:
for i in range(size):
x=x_data[i*size:(i+1)*size-1]
y=y_data[i*size:(i+1)*size-1]
yield x,y
model.fit(x_data,y_data, epochs=1000, batch_size=10)
# model.fit_generator(generator(x_data,y_data,10),steps_per_epoch=10,epochs=1000, verbose=1)
# for step in range(10001):
# cost=model.train_on_batch(x_data,y_data)
# if step%5==0:
# print('cost',cost)
#打印权重和偏置
w,b=model.layers[0].get_weights()
print('w:',w,'b:',b)
#输入x,输出预测值y
y_pred=model.predict(x_data)
#显示随机点
plt.scatter(x_data,y_data)
#显示预测的结果
plt.plot(x_data,y_pred,'r-',lw=3)
plt.show()
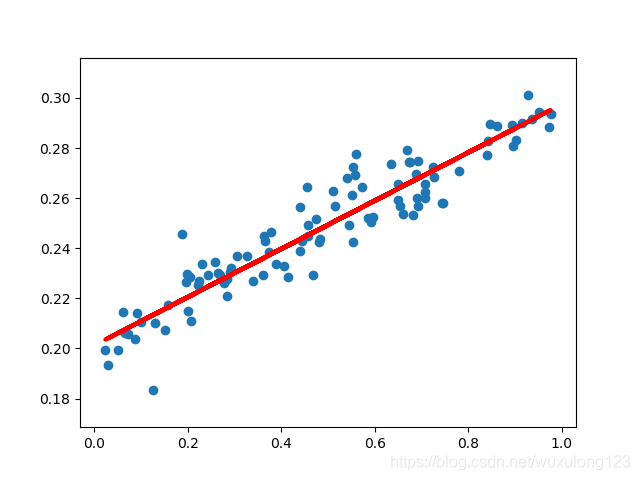
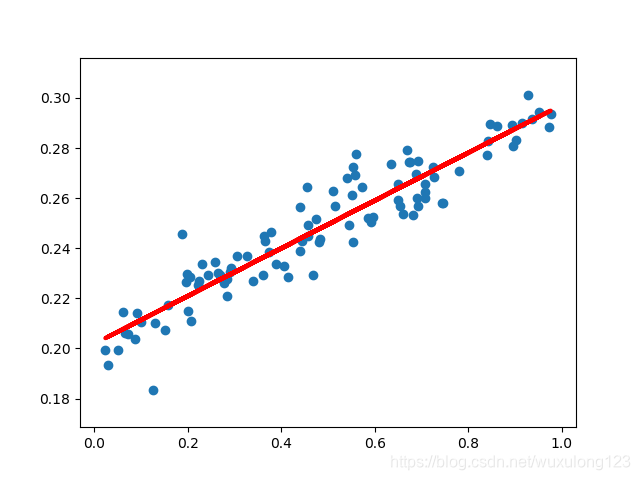
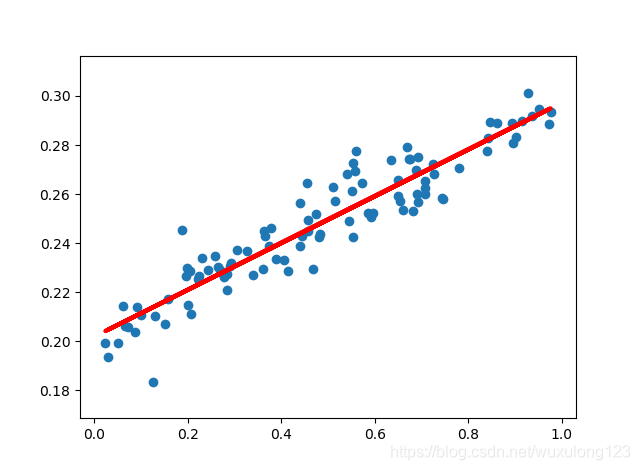
可以看出,基本一模一样,我在程序用特意用了np.random.seed(3)函数,以保持数据的一致性。
其中train_on_batch()函数没有epochs参数,所以只能手动设置循环来进行训练模型
其中,我把model.fit(x_data,y_data, epochs=1000, batch_size=100)中的batch_size参数改成了100,结果如下: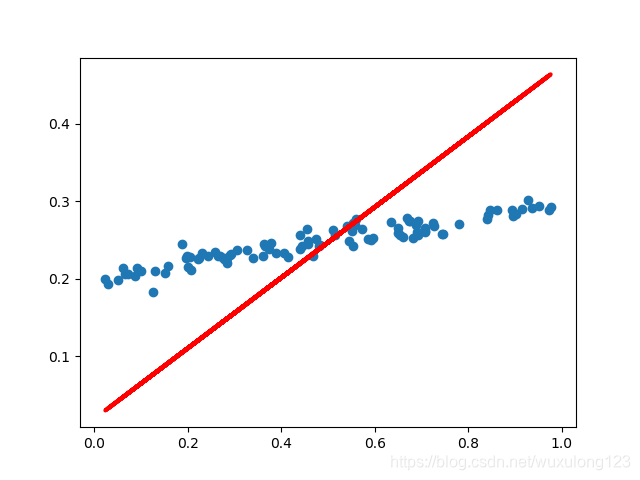
由此验证了分批的好处


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









