







导航坐标系:东-北-天
载体坐标系:右-前-上
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角),其中航向角北偏西为正,范围【-pi pi】
一、欧拉角速率和Wbnb之间关系
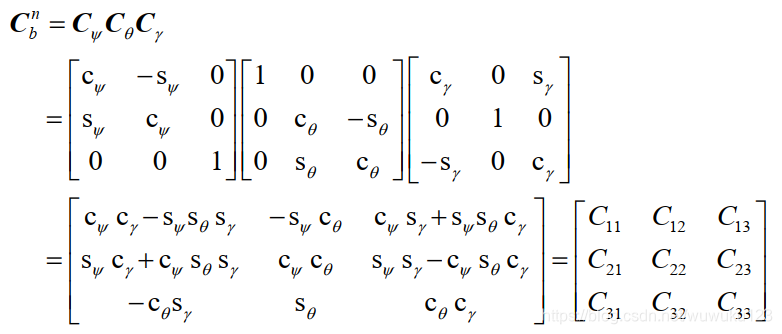
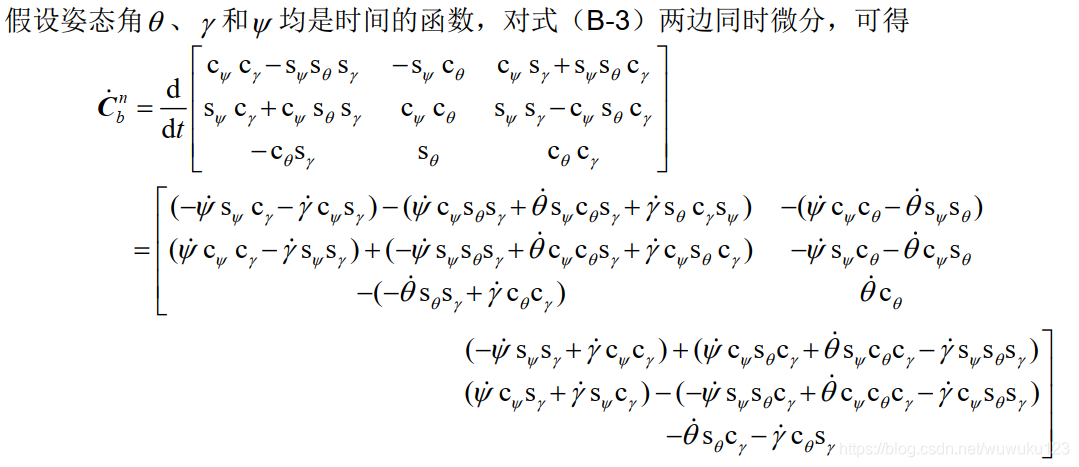
从地理坐标系到载体坐标系的方向余弦矩阵为:通过欧拉角进行变换:
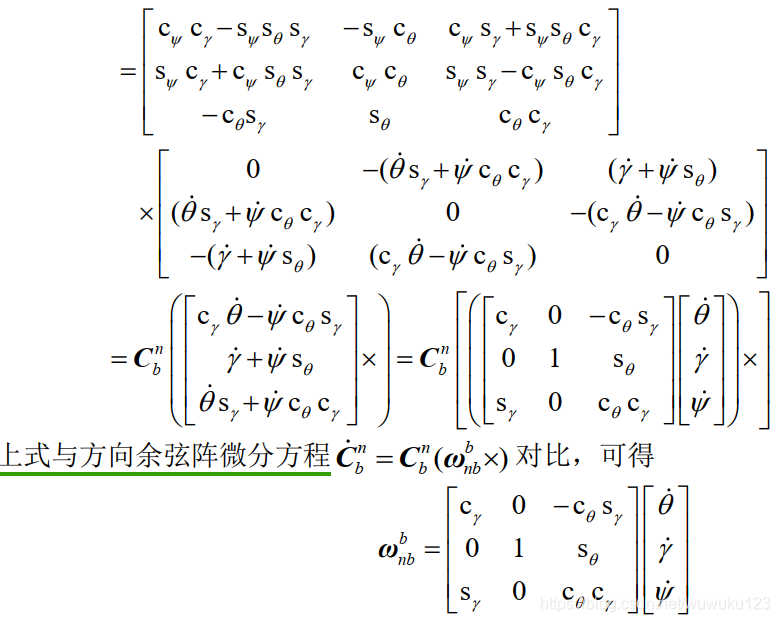
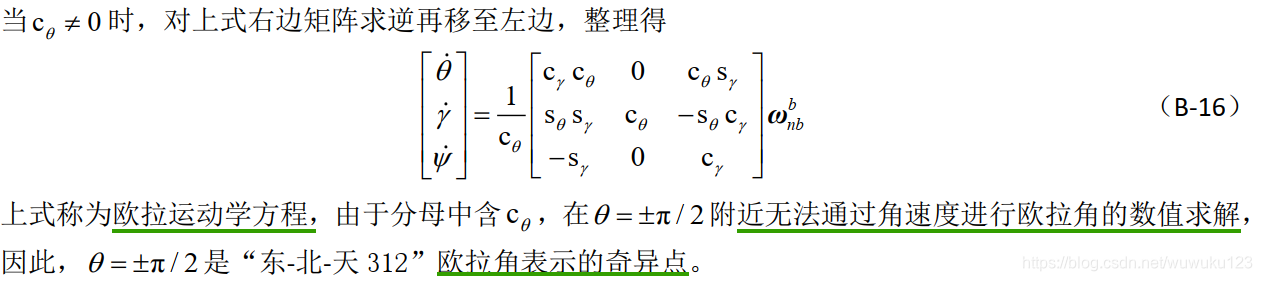
欧拉角微分方程:
二、四阶龙格-库塔算法;
代码如下:
for k=1:nn:len-nn+1-1
k1 = k+nn-1;
wvm = imu(k:k1,1:6); t = imu(k1,end);
ins = insupdate(ins, wvm); ins.pos(3) = trj.avp(k1,9); %高度值始终为参考初始高度
wf = imu(k:k1+1,1:6)'/ts; %变为速率形式,3个采样值
avp_rk4 = rgkt4(@dsins, wf, avp_rk4, nts); avp_rk4(9) = trj.avp(k1,9); %高度值始终为参考初始高度
avp(ki,:) = [ins.avp; t]';
avp4(ki,:) = [avp_rk4; t]';
ki = timebar;
end其中龙格库塔计算程序为:
x0 = x01(:,1); xhalf = x01(:,2); x1 = x01(:,3);
k1 = hfun(x0, y0);
k2 = hfun(xhalf, y0+h/2*k1);
k3 = hfun(xhalf, y0+h/2*k2);
k4 = hfun(x1, y0+h*k3);
y1 = y0 + h/6*(k1+2*(k2+k3)+k4);计算欧拉角速率、速度变化率(加速度)、位置变化率,为
函数原型:dsins.m
% Prototype: davp = dsins(wf, avp)
% Inputs: wf - wf = [wb, fb], wb for gyro angular rate and fb for acc
% specific force
% avp - avp = [att, vn, pos], Euler angles, velocity & position
% Output: avp - d(avp)/dt代码实现:
wb = wf(1:3); fb = wf(4:6);
att = avp(1:3); vn = avp(4:6); pos = avp(7:9);
s = sin(att); c = cos(att);
si = s(1); sj = s(2); sk = s(3);
ci = c(1); cj = c(2); ck = c(3); ti = si/ci;
Caw = [ cj, 0, sj;
sj*ti, 1, -cj*ti;
-sj/ci, 0, cj/ci ]; % a2caw
Cnb = [ cj*ck-si*sj*sk, -ci*sk, sj*ck+si*cj*sk;
cj*sk+si*sj*ck, ci*ck, sj*sk-si*cj*ck;
-ci*sj, si, ci*cj ]; % a2mat
eth = earth(pos, vn);
datt = Caw*(wb-Cnb'*eth.wnin); %欧拉角变化速率
dvn = Cnb*fb + eth.gcc;
dpos = [vn(2)/eth.RMh;vn(1)/eth.clRNh;vn(3)];
davp = [datt; dvn; dpos];三、结果对比:
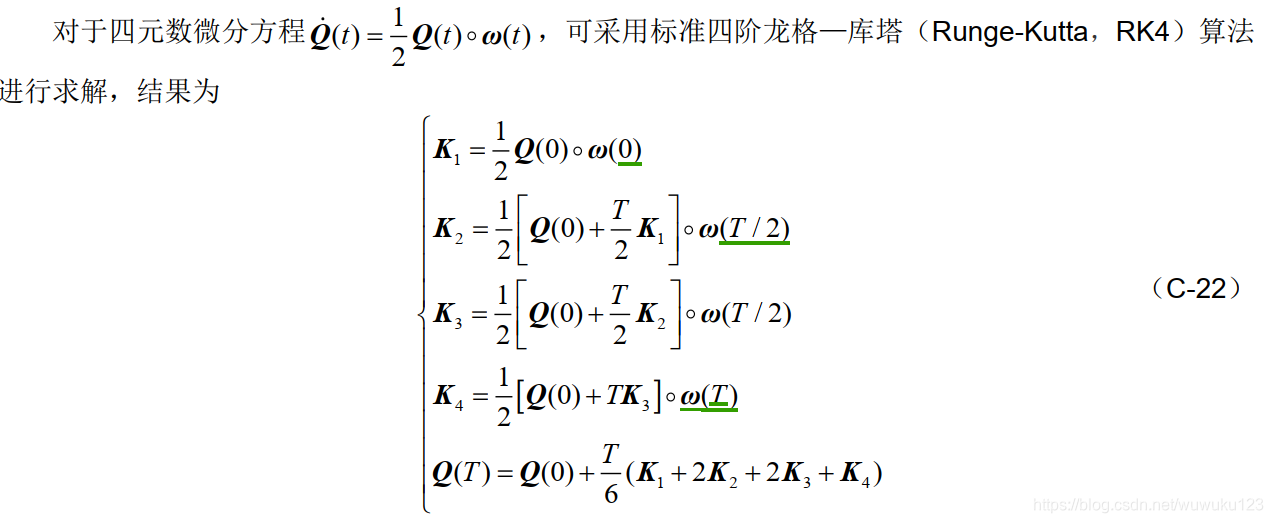
双子样算法求解:
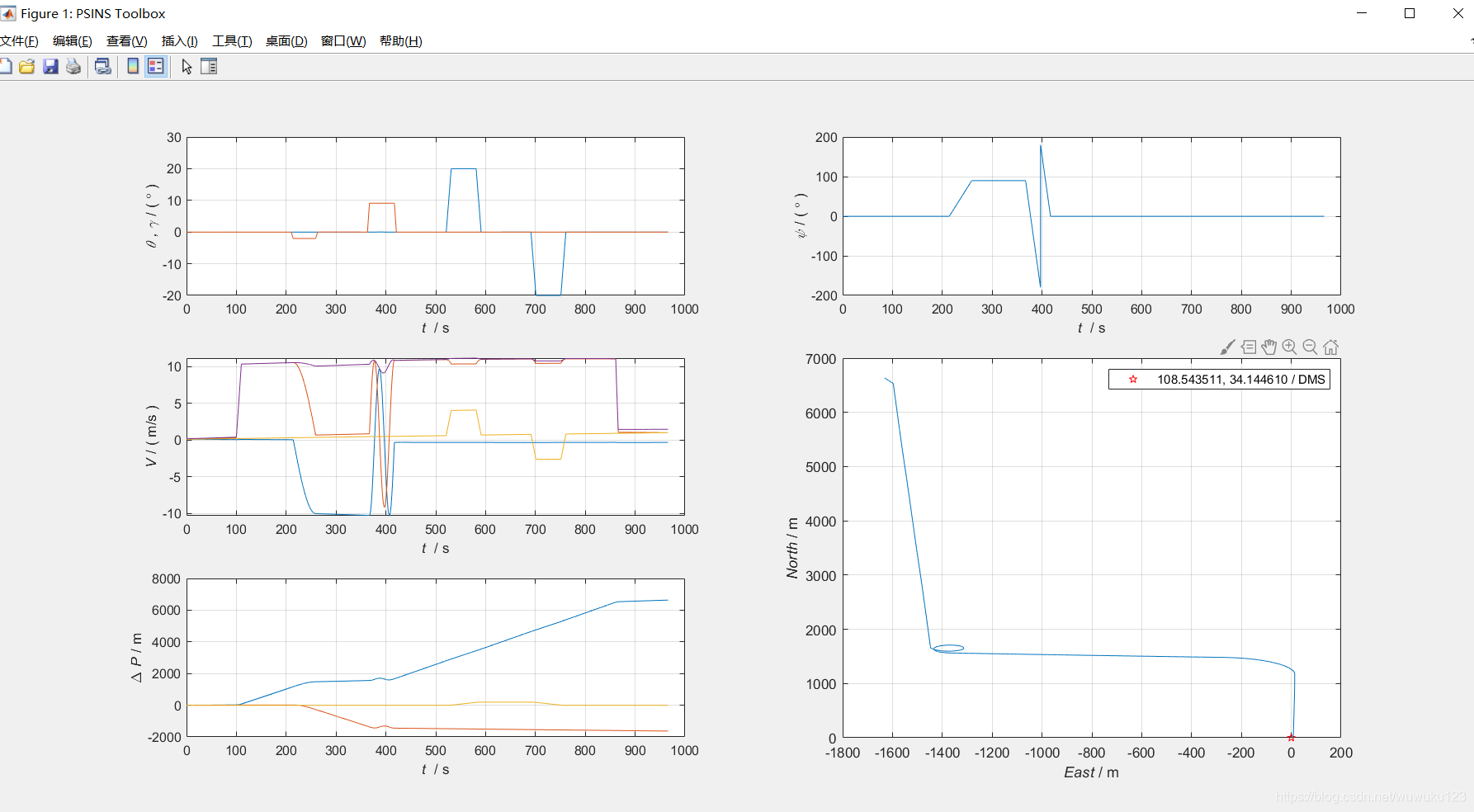
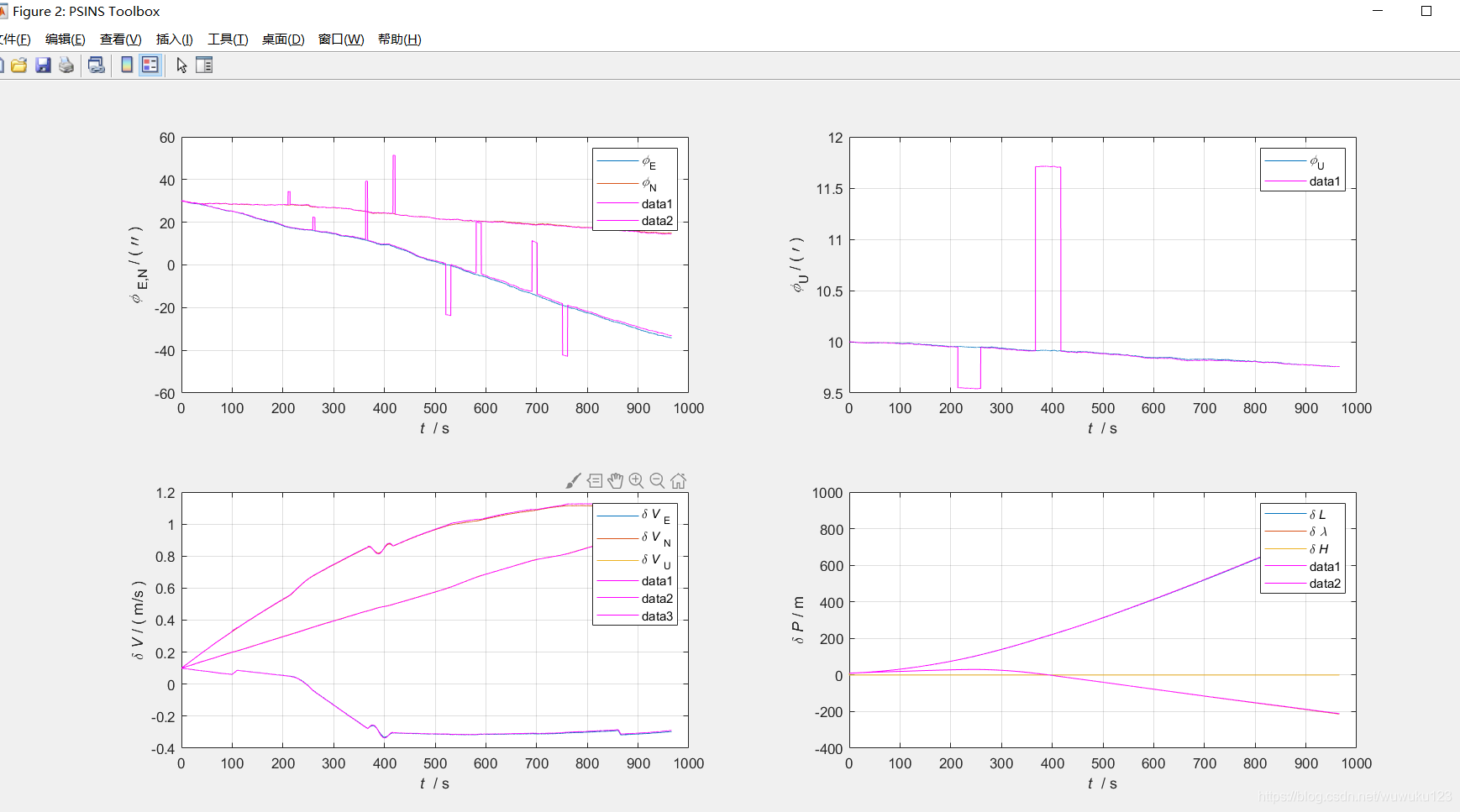
双子样求解avp和参考振值误差:
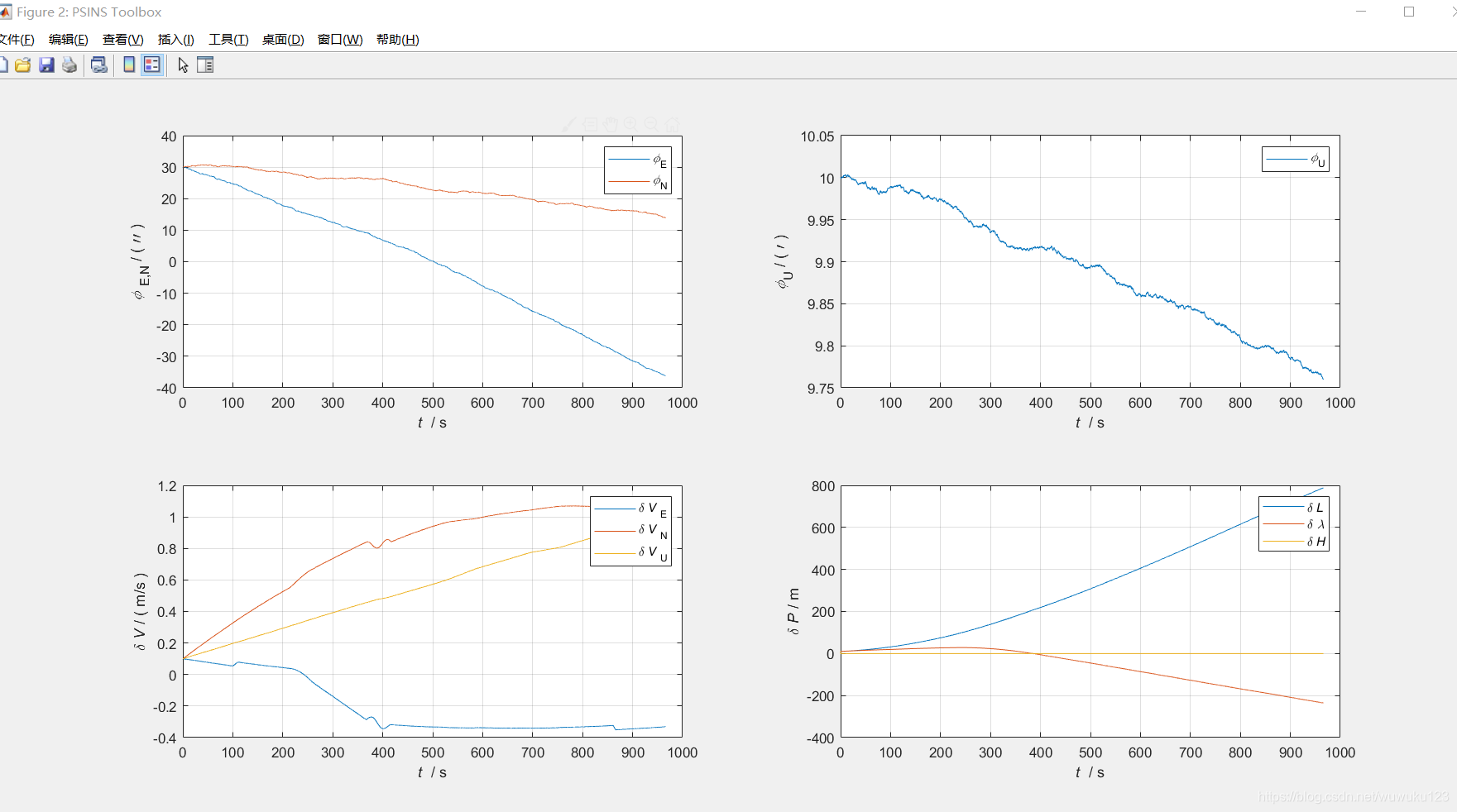
四阶龙格-库塔求解avp:
四阶龙格-库塔求解avp与参考真值差:
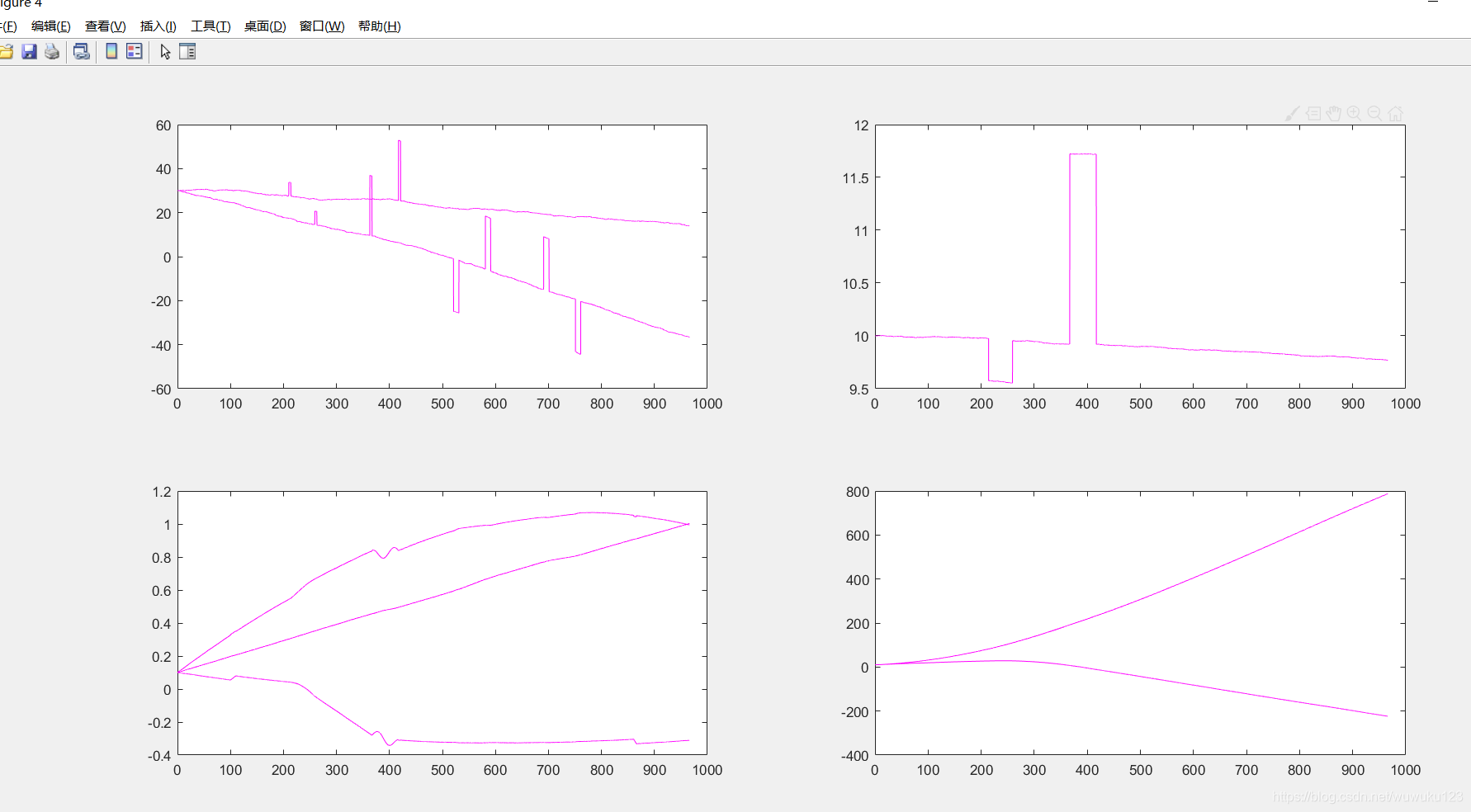
两种方法所求的avp与参考真值之差,合并画图:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









