






 本文介绍LVSDR模式的搭建步骤,包括IP设置、VIP绑定、端口转发及规则配置,并通过Keepalived实现故障检测与避免,确保负载均衡的稳定运行。
本文介绍LVSDR模式的搭建步骤,包括IP设置、VIP绑定、端口转发及规则配置,并通过Keepalived实现故障检测与避免,确保负载均衡的稳定运行。
18.11 LVS DR模式搭建



准备三台机器,然后设置一下ip,我们之前改的两台rs上的网关也需要改回来,然后所有的机器都需要绑定一下vip、
然后dir上需要编辑一个脚本,







然后我们执行
然后我们还需要对两个rs机器也写一个脚本。


然后执行

然后我们可以
也可以
然后我们可以测试一下了,这个模式因为vip的缘故,所以在3台机器上都测试不了,所以要在浏览器上或在第四台机器上curl访问133.200的IP地址,然后刷性就会发现它显示的内容在变。
也可以使用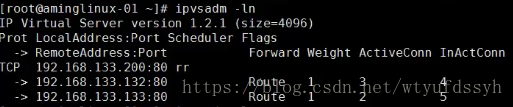 查看请求数,负载均衡成功的话这两个ip的三组数字应该差不多是1:1的。
查看请求数,负载均衡成功的话这两个ip的三组数字应该差不多是1:1的。
18.12 keepalived + LVS


lvs的其中一台rs宕机或者关闭了那么就会出问题,因为lvs还是会把请求发给宕机的那台rs,而keepalived就可以解决这个问题,当请求发往宕机的rs的时候它能够自动检测到,所以就不会把请求转发到宕机的rs上了。

然后编辑文件

然后内容从如上网址复制,其中如下ip需要根据自己ip更改


 我们这里为了测试改成0即可
我们这里为了测试改成0即可
然后我们启动keepalived

然后我们需要把原来的规则清空一下

我们可以使用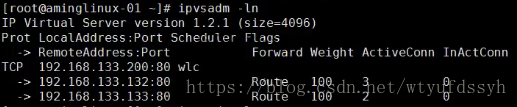 查看ipvsadm规则。
查看ipvsadm规则。
配置keepalived+lvs依然需要执行rs上的脚本,
而dir机器上需要执行脚本里的


















 5496
5496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









