 优化YoloV3:理解并应用Focal Loss提升模型性能
优化YoloV3:理解并应用Focal Loss提升模型性能




最近在修改yolov3的损失函数,想提升模型性能,了解了focal_loss,记录一下这脑子转不动的一天。
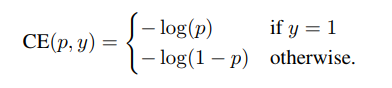
1.二分类Loss表达式
首先,了解一下损失函数。p为预测概率,值在0-1之间,y为真实标签,只有两个值,存在1(1)与否(0)。如果存在,则我们计算的算是就是预测准确的损失,否则就是预测不存在的损失。
2. Focal_loss表达式
二分类的focal_loss表达式时基于上式演化而来的,首先我们获得不同真实标签时,概率的表达式。
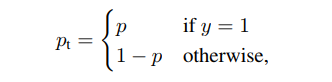
之后,我们将此概率代入focal_lossb表达式,如下图,其中pt的取值是根据真实标签获取的。

详细拆分后,具体公式如下所示:

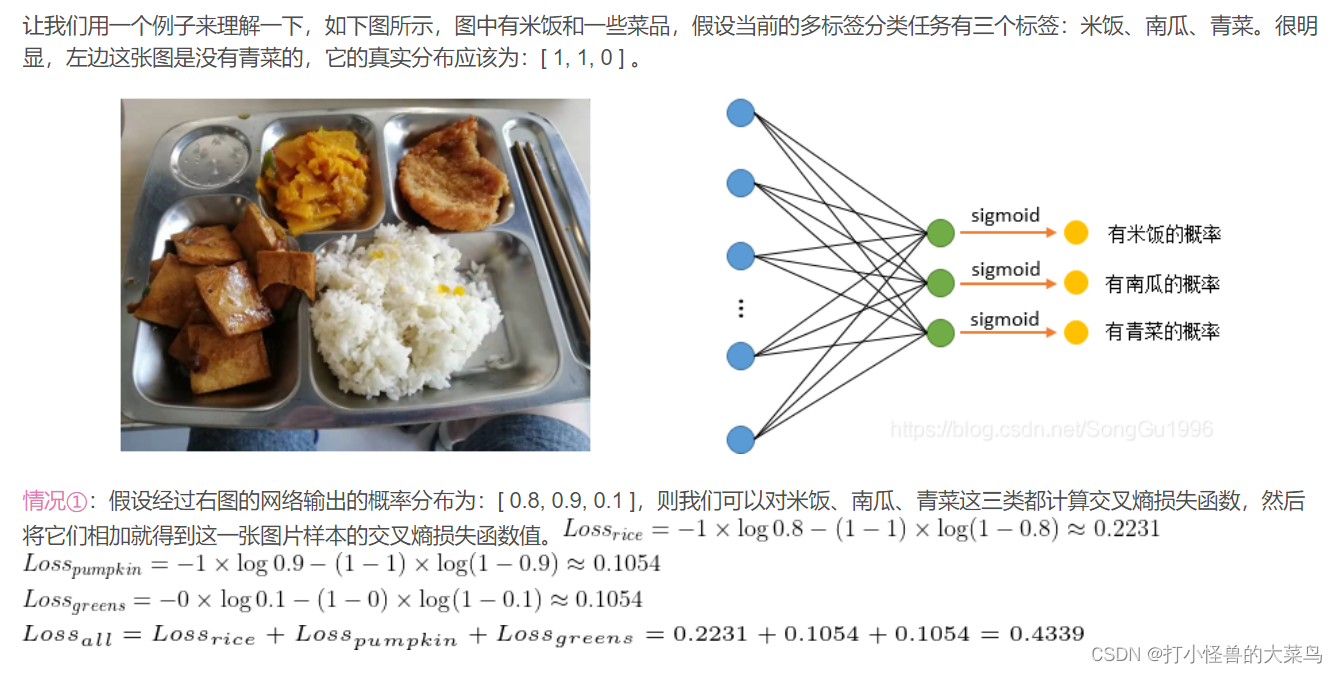
3.多标签的Loss表达式,总的交叉熵为多标签分类任务中每一类的交叉熵之和。其中y为真实值(0或者1),y^为该类别预测概率

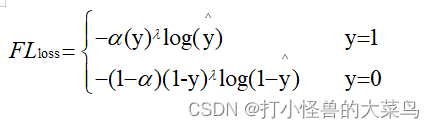
4.多标签的focal_loss表达式
根据二分类的表达式,可以推断出为:


















 1970
1970



 到【灌水乐园】发言
到【灌水乐园】发言







