





和你一起终身学习,这里是程序员Android
经典好文推荐,通过阅读本文,您将收获以下知识点:
一、美颜相机录制视频 trace 分析概览
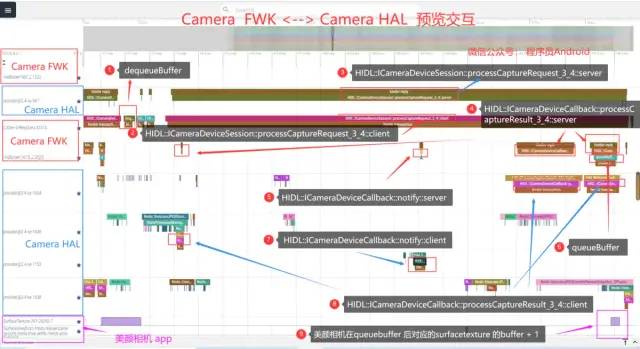
二、Camera FWK 与 camera HAL 录像交互
三、美颜相机app 与SurfaceFlinger 交互
四、美颜相机卡顿丢帧trace 分析
一、美颜相机录制视频 trace 分析概览

美颜相机录制视频 trace 分析概览
截取1s 内 美颜相机帧率为30fps, 对应的Camera HAL 、Camera FWK 、美颜相机 App 的帧率如上
二、Camera FWK 与 camera HAL 录像交互
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1617
1617

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











