




Harris实现过程:
计算图像在X和Y方向的梯度:
计算图像两个方向梯度的乘积
使用高斯函数对三者进行高斯加权,生成矩阵M的A,B,C;
计算每个像素的Harris相应值R,并对小于某一阈值t的R置为零;
在3*3或者5*5邻域内进行非最大值抑制,局部最大值点即为图像中的角点。
cv2.cornerHarris()参数如下:
img-数据类型为float32的输入图像
blocksize-角点检测中的领域大小
ksize-Sobel求导中使用的窗口大小
k-Harris角点检测方程中的自由参数,取值参数为[0.04,0.06]
import cv2
import numpy as np
img = cv2.imread('test5.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
#输入图像必须是float32,最后的一个参数在0.04到0.06之间
dst = cv2.cornerHarris(gray,2,3,0.03)
#结果进行膨胀,可有可无
dst = cv2.dilate(dst,None)
print(dst)
#设定阈值,不同图像阈值不同
img[dst>0.01*dst.max()]=[0,0,255]
print(dst.max())
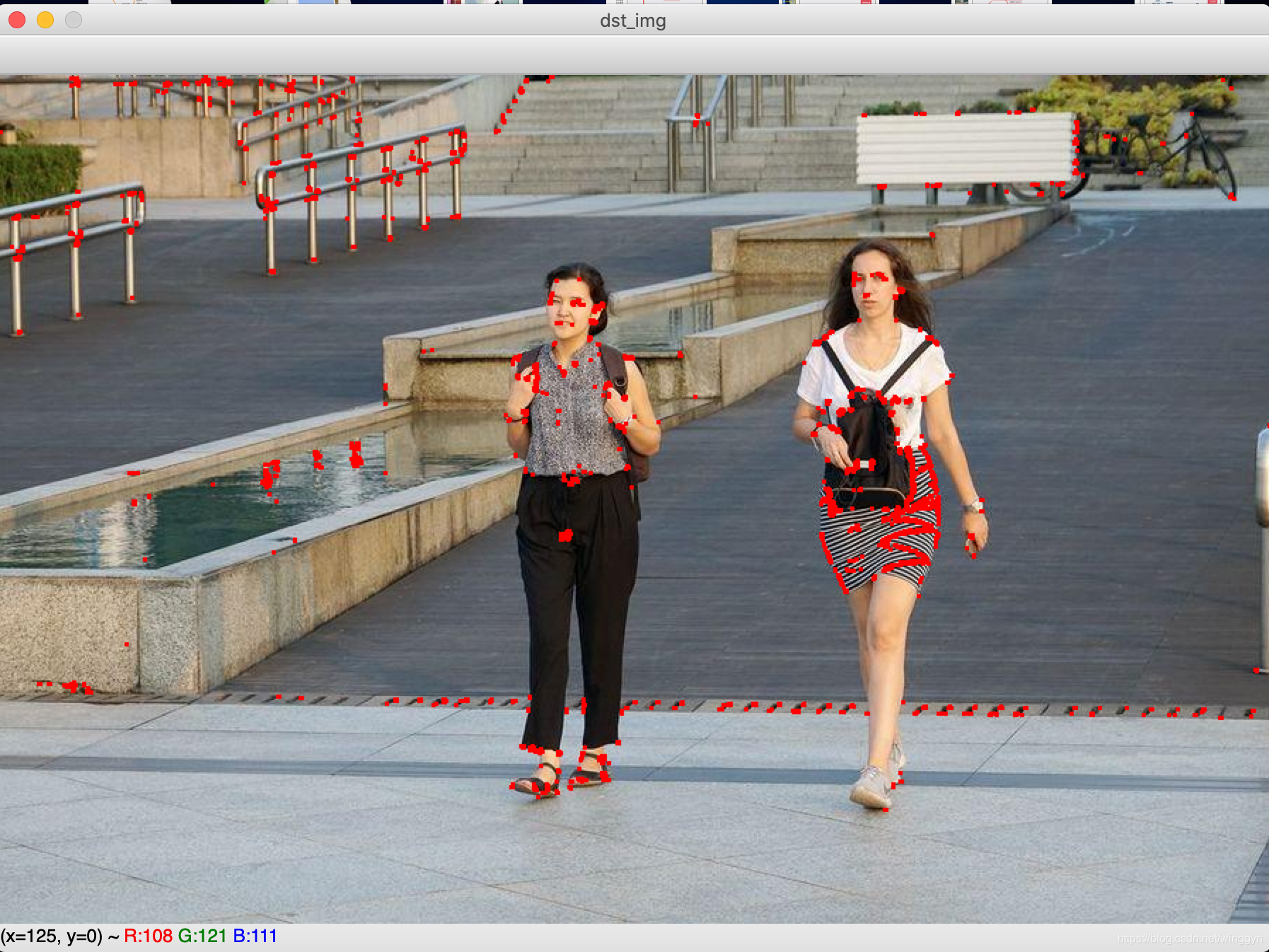
cv2.imshow('dst_img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
参数为0.03和0.06时候的结果比较。。。。



SIFT代码:
import cv2
import numpy as np
img = cv2.imread('test.jpg')
gray =cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
sift = cv2.xfeatures2d.SIFT_create()
kp = sift.detecgt(gray,None)
img = cv2.drawKeyPoints(gray,kp,img)
cv2.imshow('sp',img)
cv2.waitKey()
#需要最新的才可以执行

















 1397
1397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









