




CS231n学习笔记——更好的优化算法
SGD的缺点:
优化的轨迹会如图所示,因为很多函数的梯度方向并不是直接朝向最小值的,所以沿着梯度前进的时候可能会来回反复。这个问题在高维空间中更加普遍,
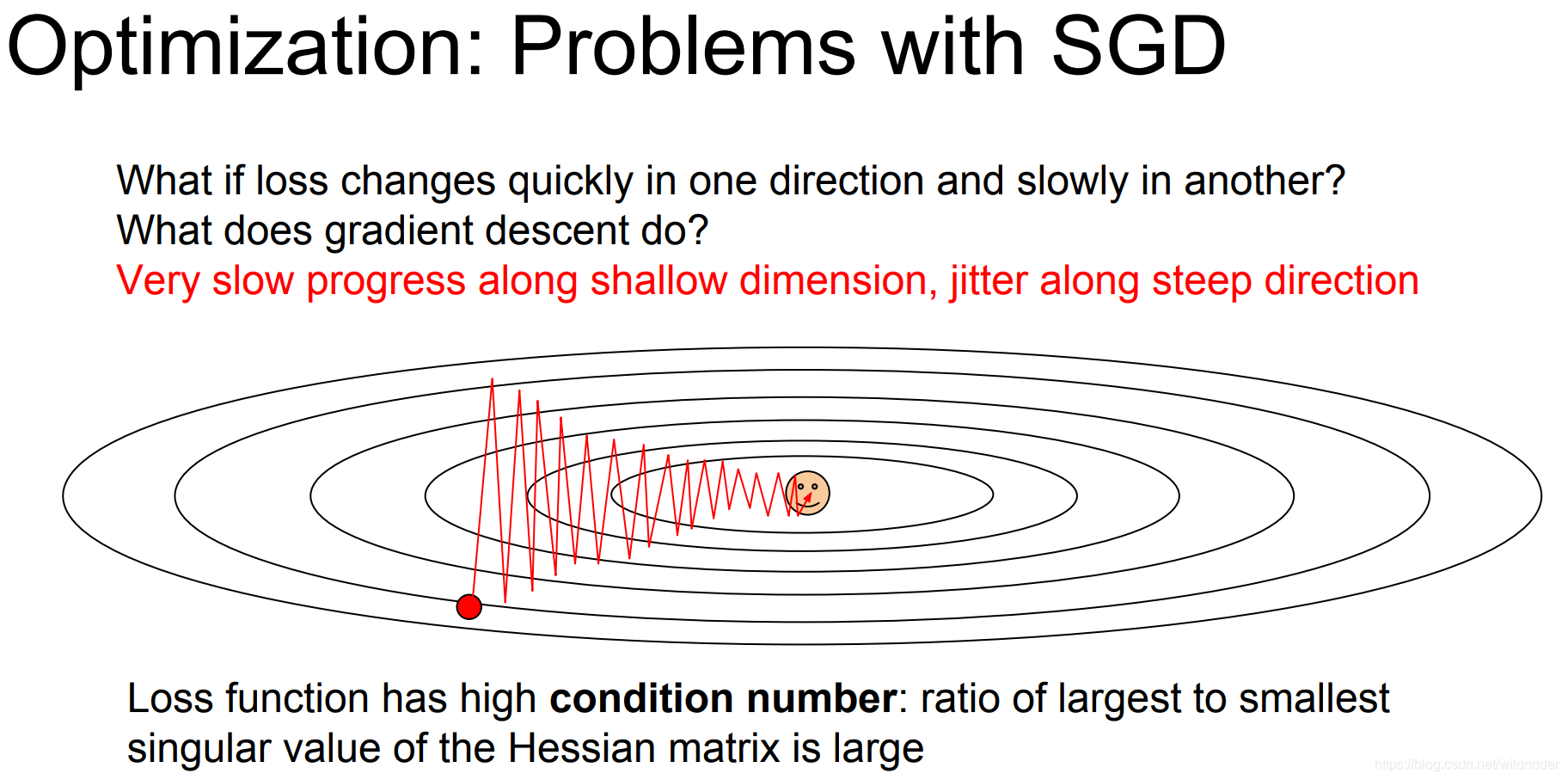
而且SGD很容易陷入局部最小值
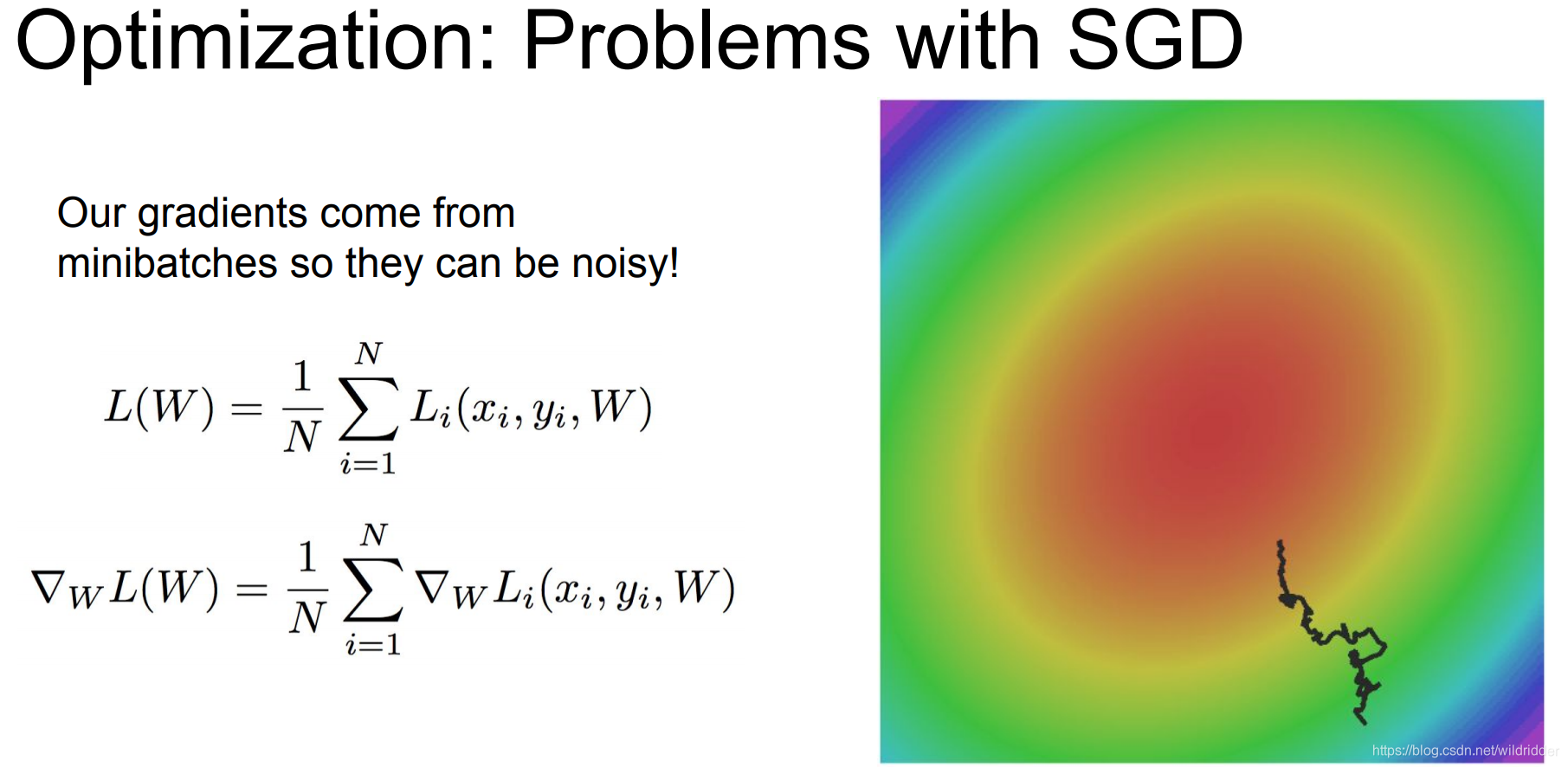
而且在mini batch训练中,每次都取出一小部分数据学习梯度,导致学习到的梯度与正真的梯度有些偏差,特别是在存在噪声的数据中,这样的SGD可能需要更多时间去找到最小值点
而在随机梯度下降中加入一个动量项,
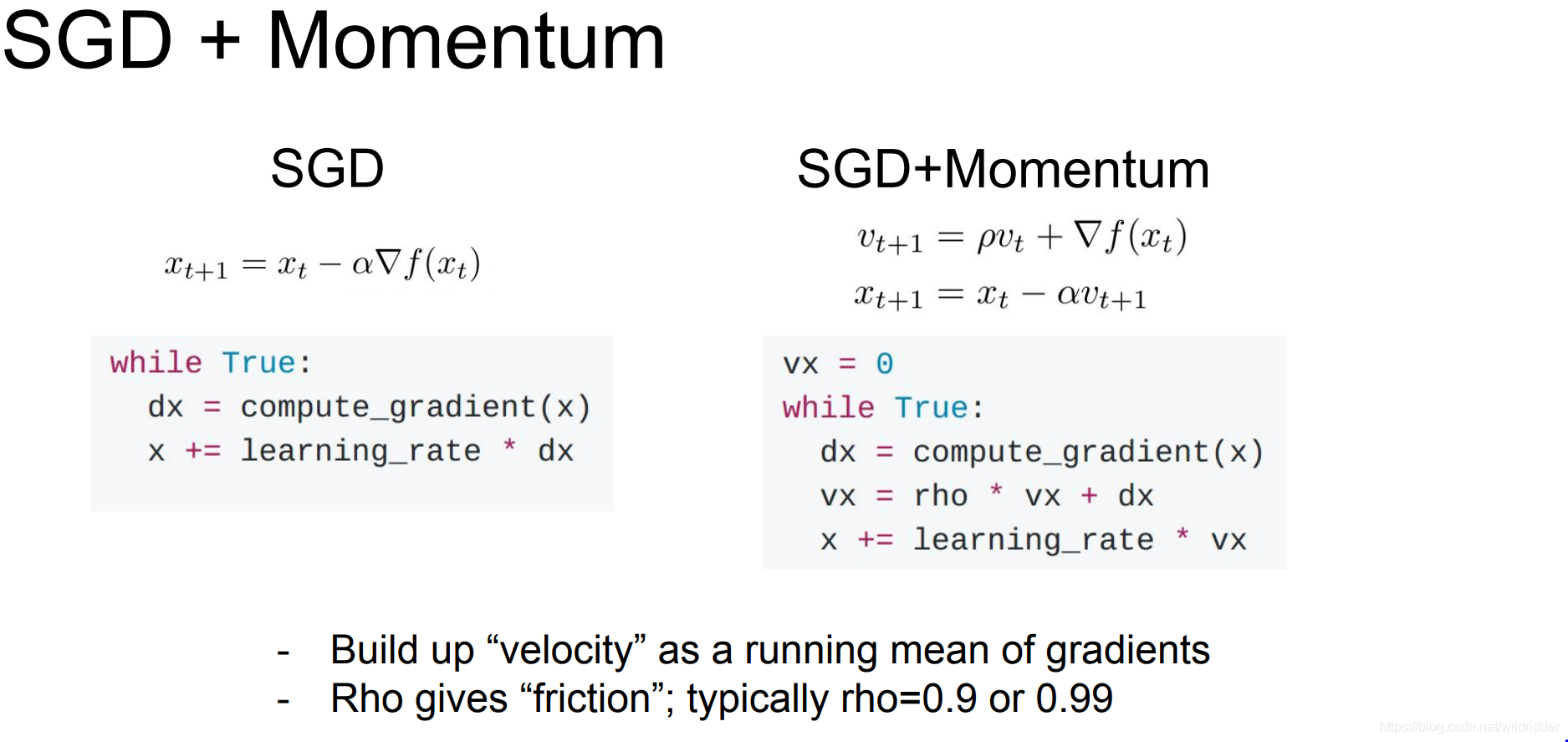
构造一个保持不变的项——速度v,把每一次算出来的梯度都加到这个速度上,在这个速度方向上步进而不是梯度上。这相当于给梯度加上了一个动量,让它在局部最小值点或者鞍点上不会轻易停下来。
在每一次计算速度上,都要加上一个rho系数,也就是摩擦系数,让上一次的速度乘以0.9再加上这次新的梯度,综合来看,每一次的速度值都是之前所有梯度的加权和,越近的梯度权重越大,越久远的梯度权重越小。所以可以把它看成一个最近梯度平均的平滑移动。
另一种有轻微变化的叫Nesterov Momentum会在速度方向上重新选择步进值。
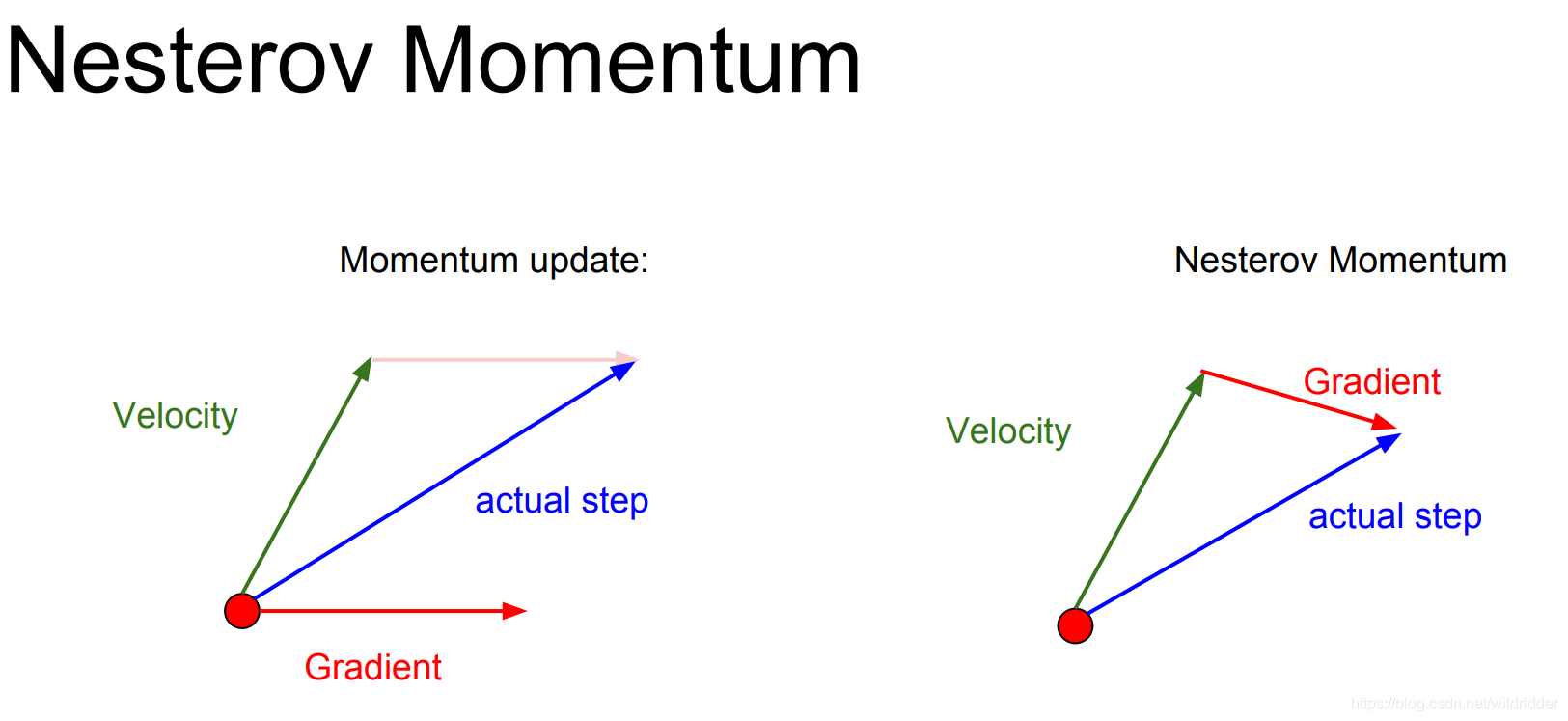
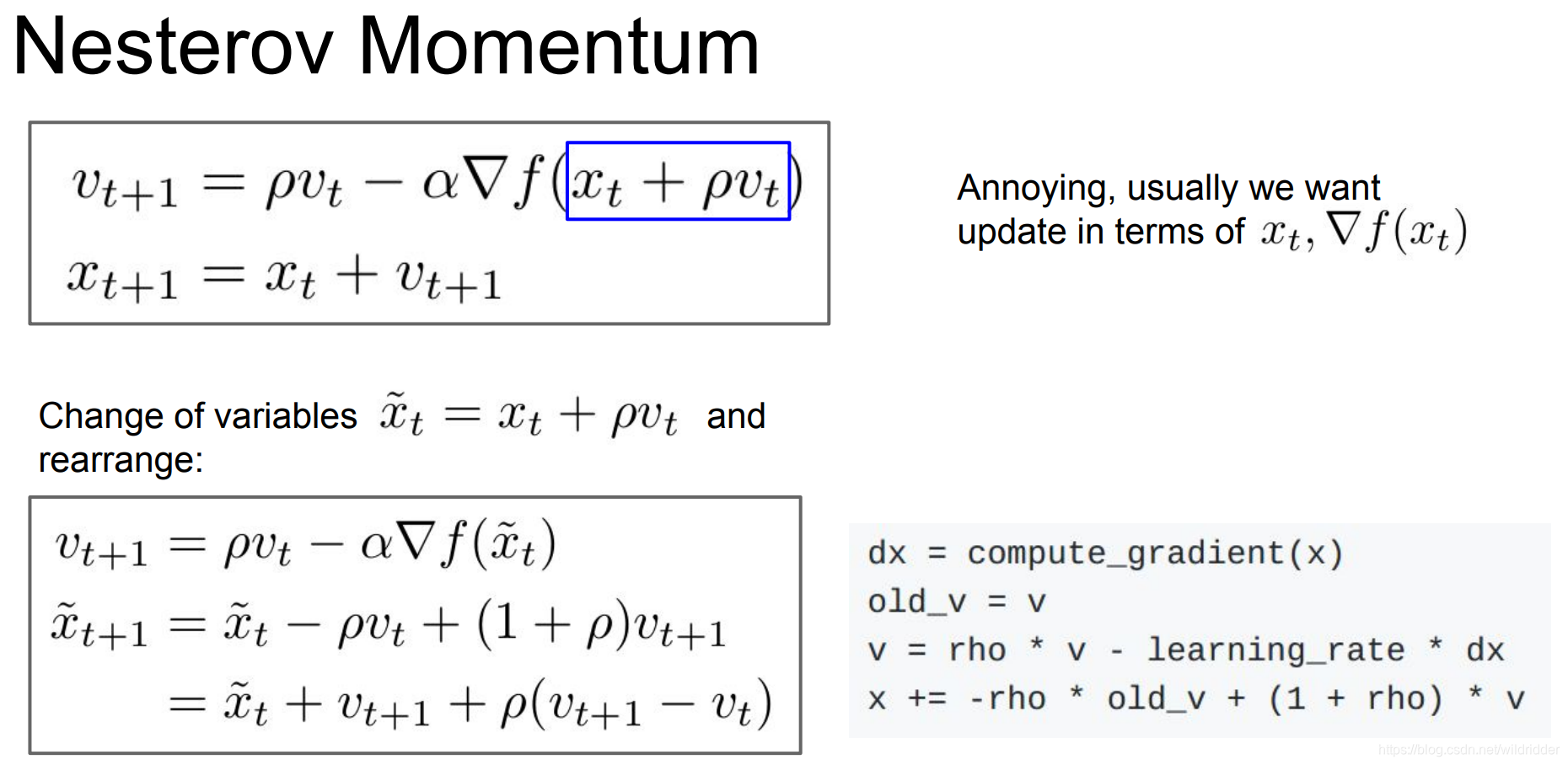
由于Nesterov有校正因子的存在,他不会那么剧烈越过局部极小值点。
AdaGrad优化算法
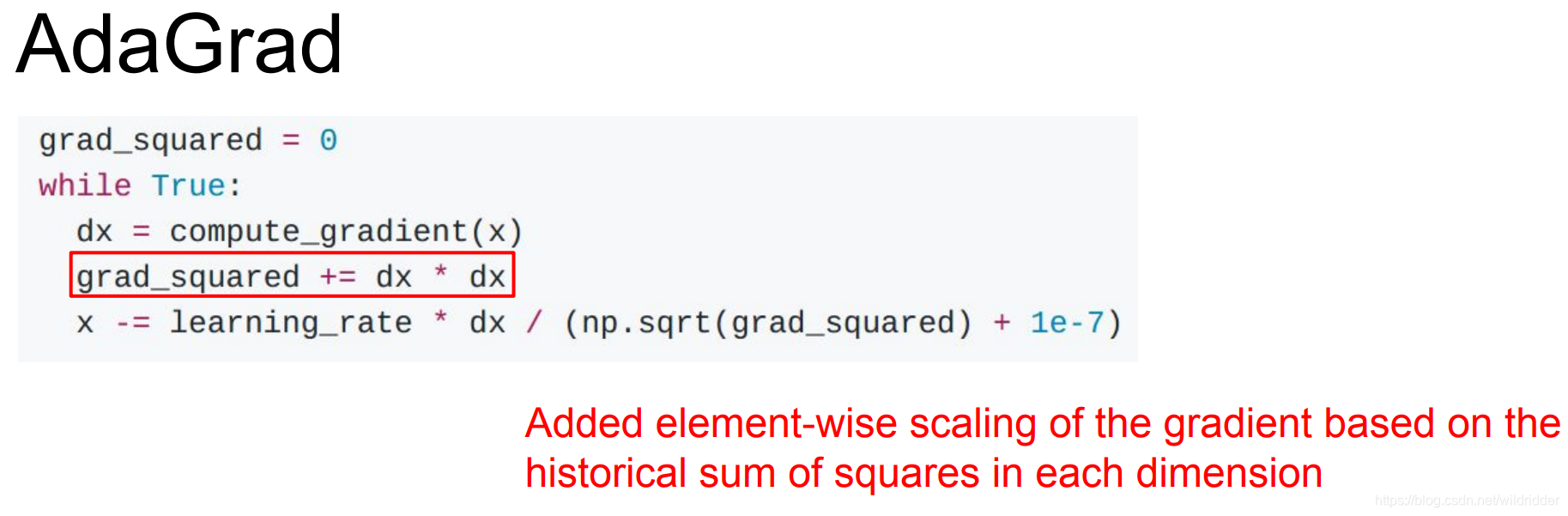
保持计算每一步的梯度平方和的持续估计,训练时会一直持续叠加当前梯度的平方和到这个梯度平方项,当我们在更新我们的参数向量时,我们会除以这个梯度平方项
所以使用AdaGrad的时候步长会变得越来越小,在学习目标是一个凸函数时,这个特征效果很好,因为当快到达极值点时会逐渐慢下来最后到达收敛,但是在非凸函数情况下,当到达一个局部极值点时AdaGrad会让训练在这里被困住。
所以对AdaGrad有一个变体叫RMSProp
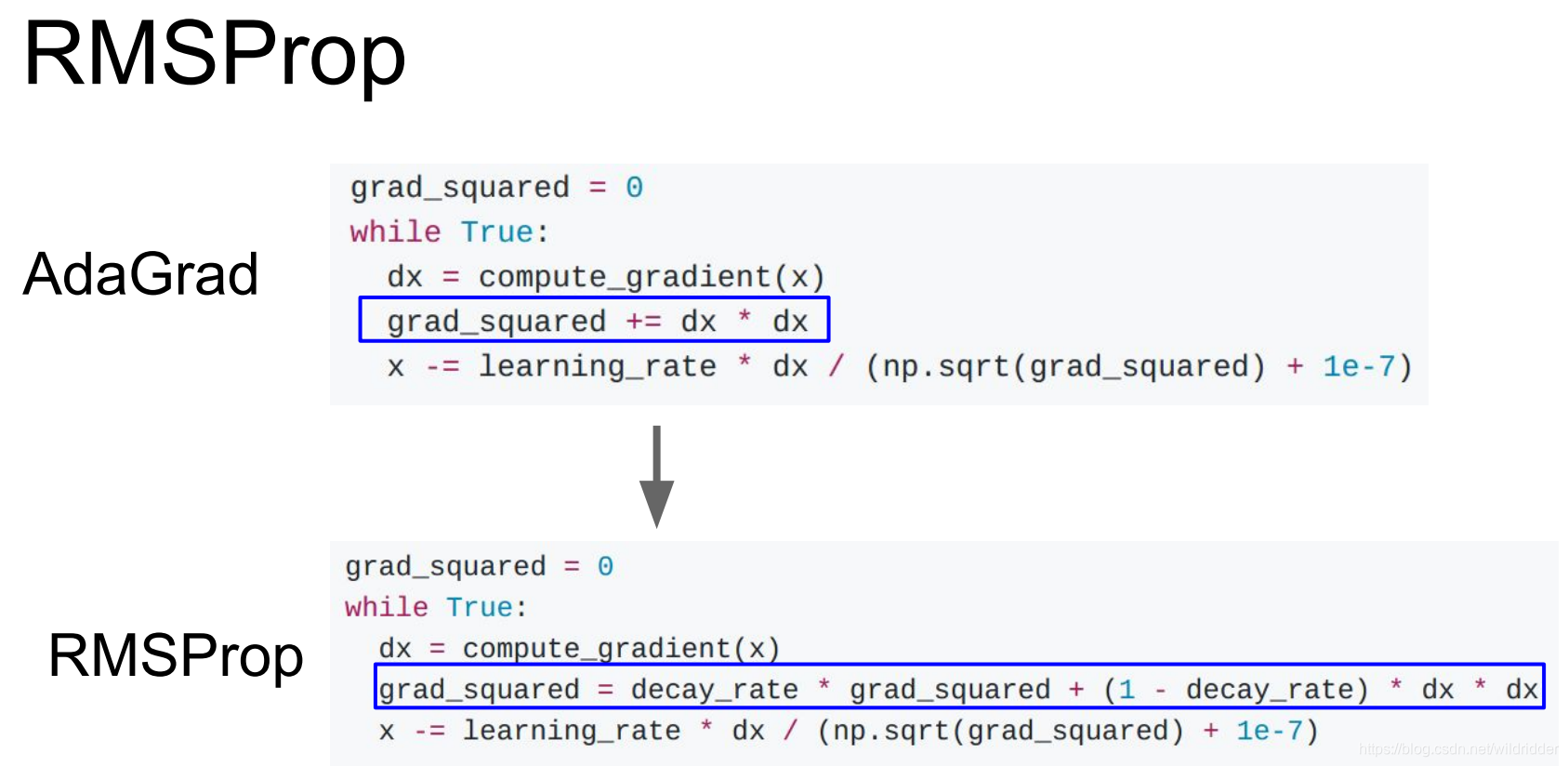
在RMSProp里并不是单纯的叠加梯度的平方,而是会让平方梯度按照一定比率下降
Adam算法
Adam算法是Momentum和RMSProp的合体,
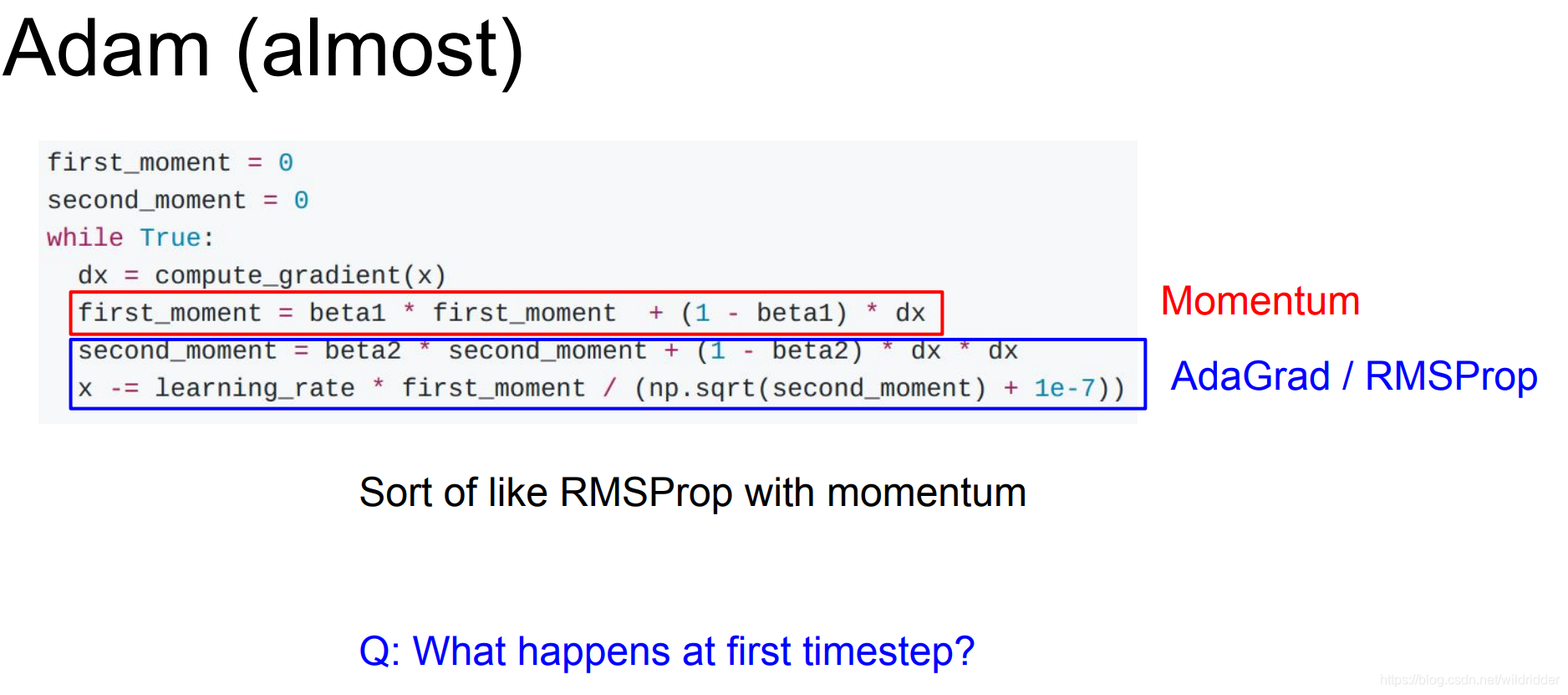
因为人为的将第二动量second_moment初始化为0,第一步算出的第二动量值很小很小,导致x步长一开始就非常非常大。所以完整版的Adam增加了偏置校正项,避免出现开始时得到很大步长:
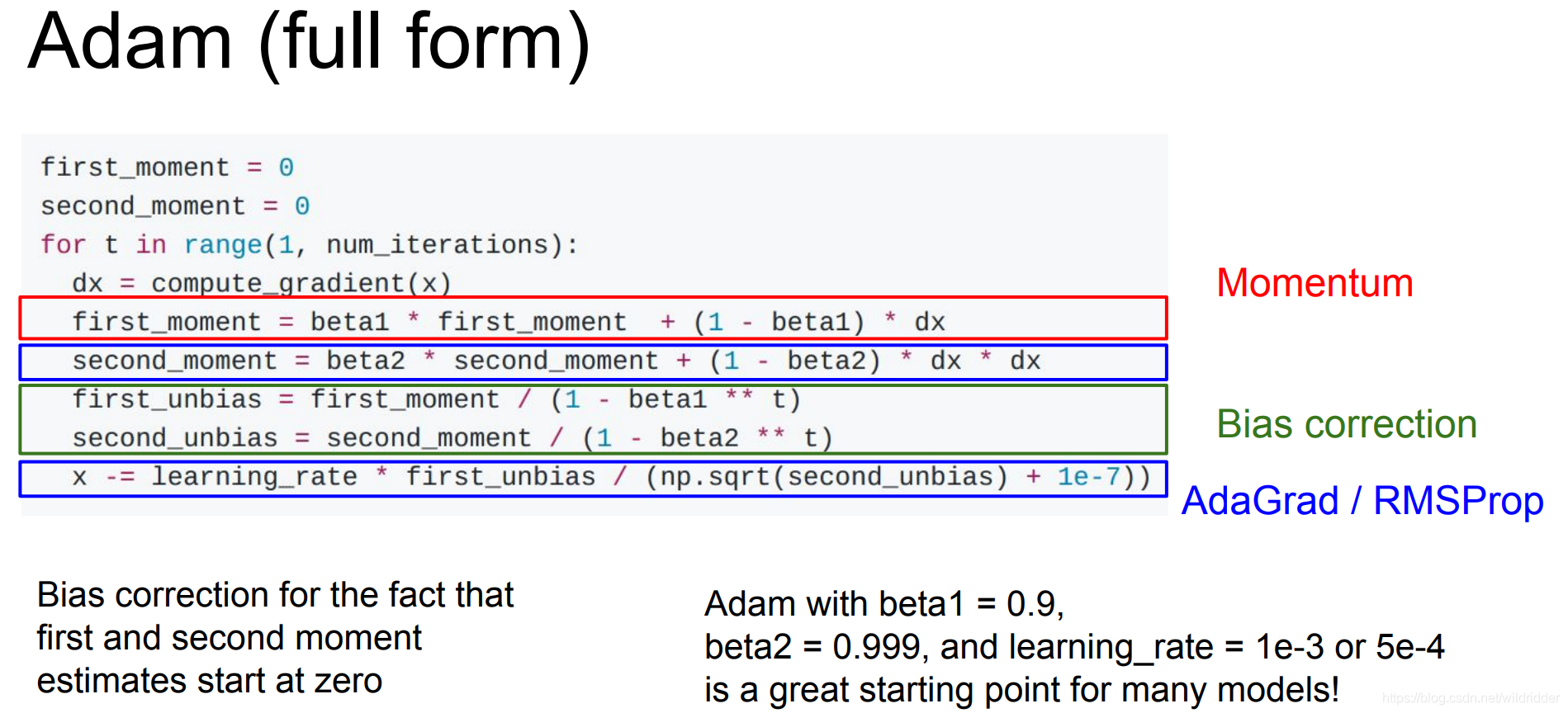
Adam对任何问题基本都有不错的表现,所以遇见新的问题时可以先尝试用Adam,特别是如果将beta1设置为0.9,beta2设置为0.999,学习率设置为1e-3,无论使用什么网络构架基本都能很好的开始。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









