 STM32F103与HC-SR04实现超声波测距及RS485/Modbus通信
STM32F103与HC-SR04实现超声波测距及RS485/Modbus通信





实验三—红外超声波雷达测距
实验内容与要求:
一. 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。
1)测试数据包含噪声,程序需要进行滤波处理;将测距数值通过串口上传到上位机串口助手;
2)根据障碍物距离远近,控制一个蜂鸣器(可以用LED灯代替)发出频率不同的声音(或LED不同闪烁),即输出占空比变化的PWM波形;
3)在没有超声波模块硬件的场景下,先使用Keil中的仿真逻辑分析仪,观察分析对应管脚上的时序波形,判读是否符合协议规范。
HC-SR04基本工作原理:
(1)采用IO口TRIG触发测距,给最少10us的高电平信呈。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回, 通过IO口ECHO输出一个高电平, 高电平持续的时间就是超声波从发射到返回的时间。
引脚连接:
VCC --> VCC
GND --> GND
Trig --> PA5
Echo --> PA0
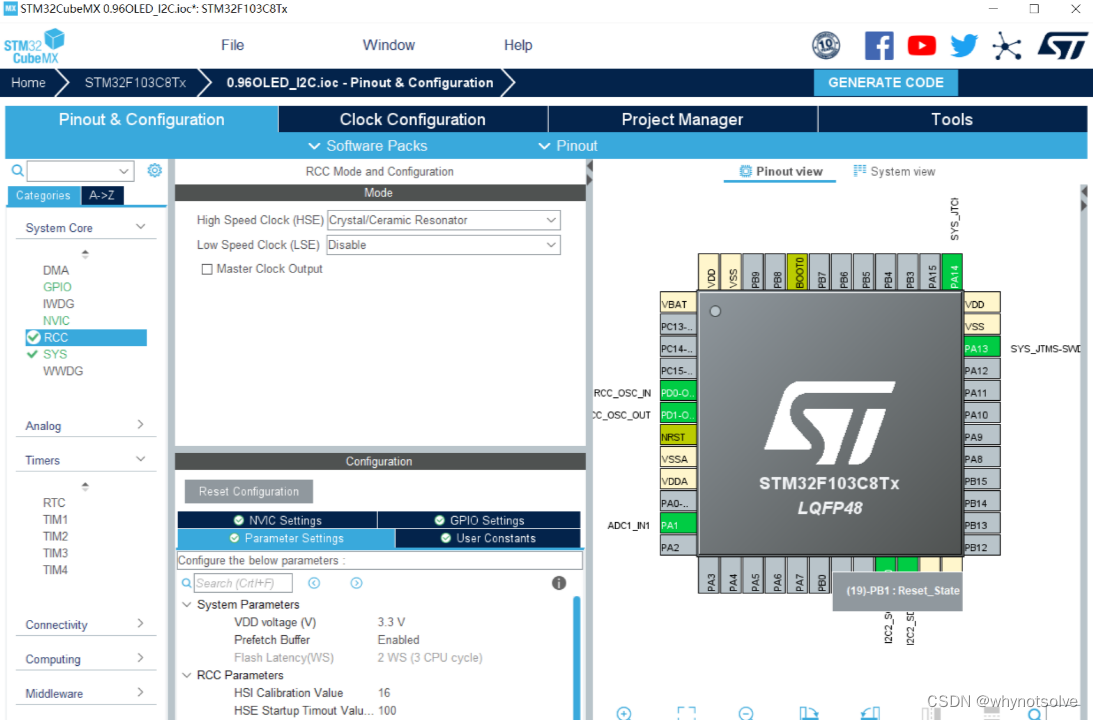
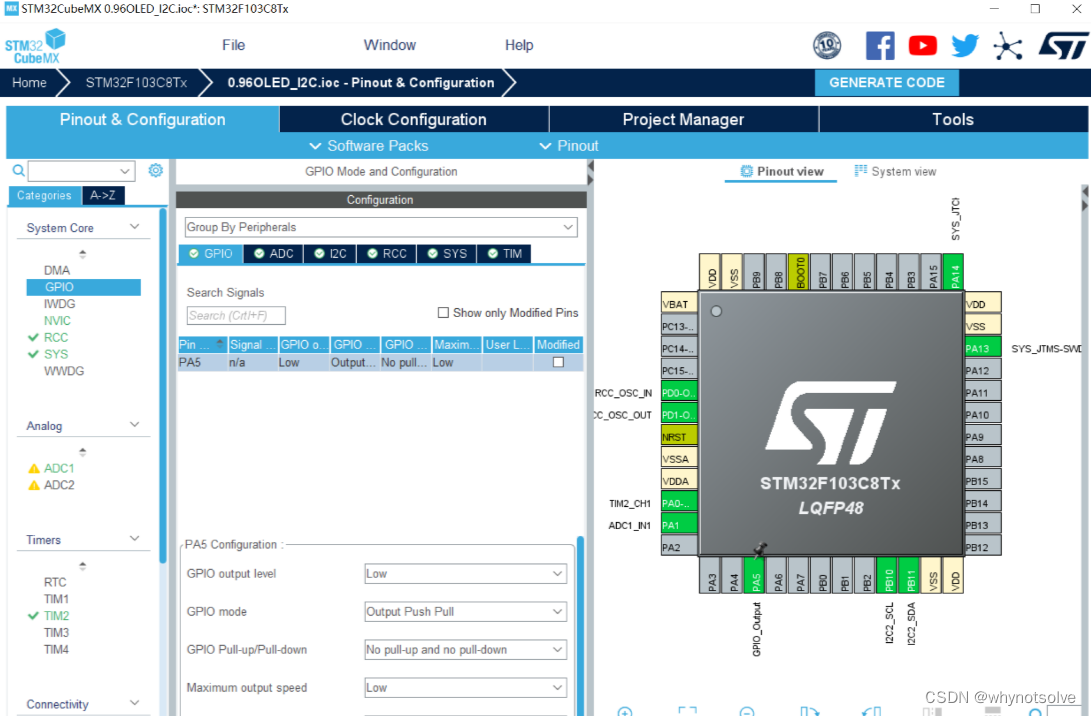
CubeMX配置:
1、RCC配置外部高速晶振——HSE
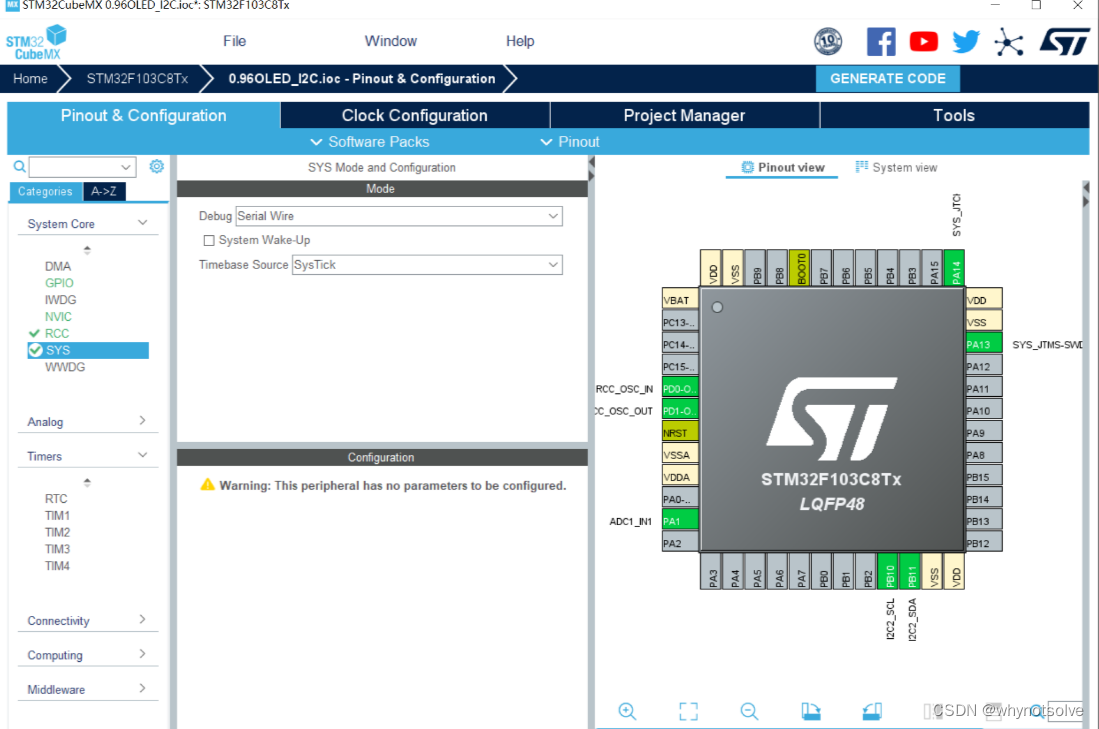
2、SYS配置:Debug设置成Serial Wire
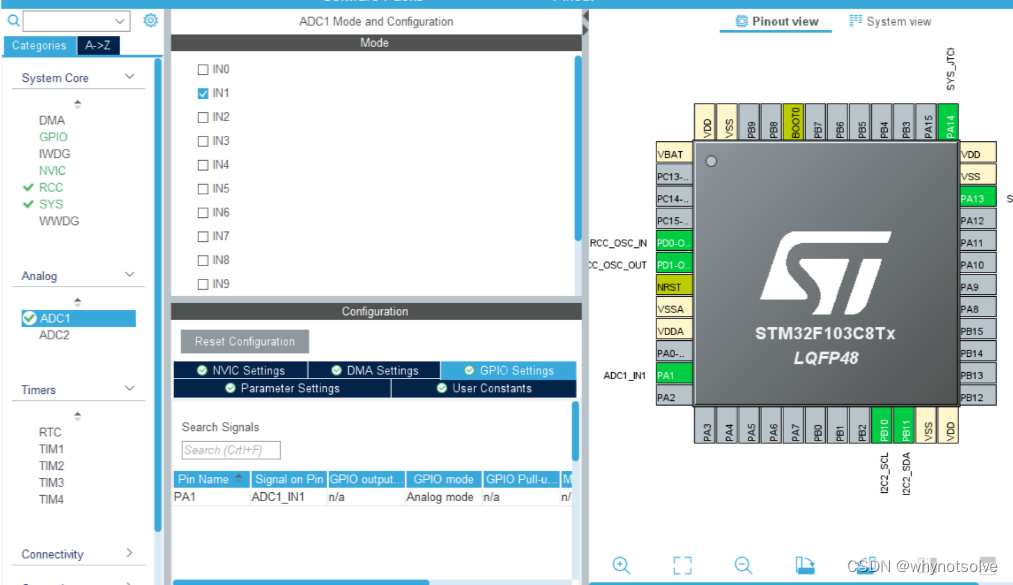
ADC1配置:配置ADC-IN1模数转换
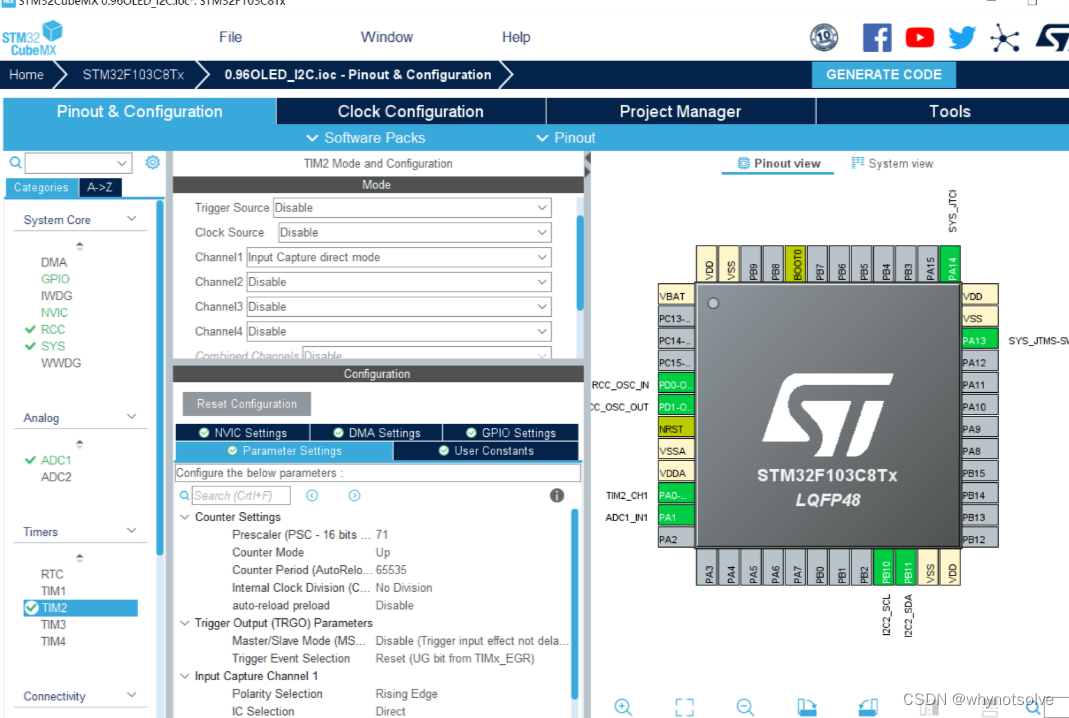
TIM2配置:设置定时器TIM2每1us向上计数一次,通道1为上升沿捕获并连接到超声波模块的ECHO引脚
GPIO配置:PA5接到了HC-SR04的TRIG触发引脚,默认输出低电平
TIM1配置:由上面可知HC-SR04的使用需要us级的延迟函数,HAL库自带只有ms的,所以需要自己设计一个定时器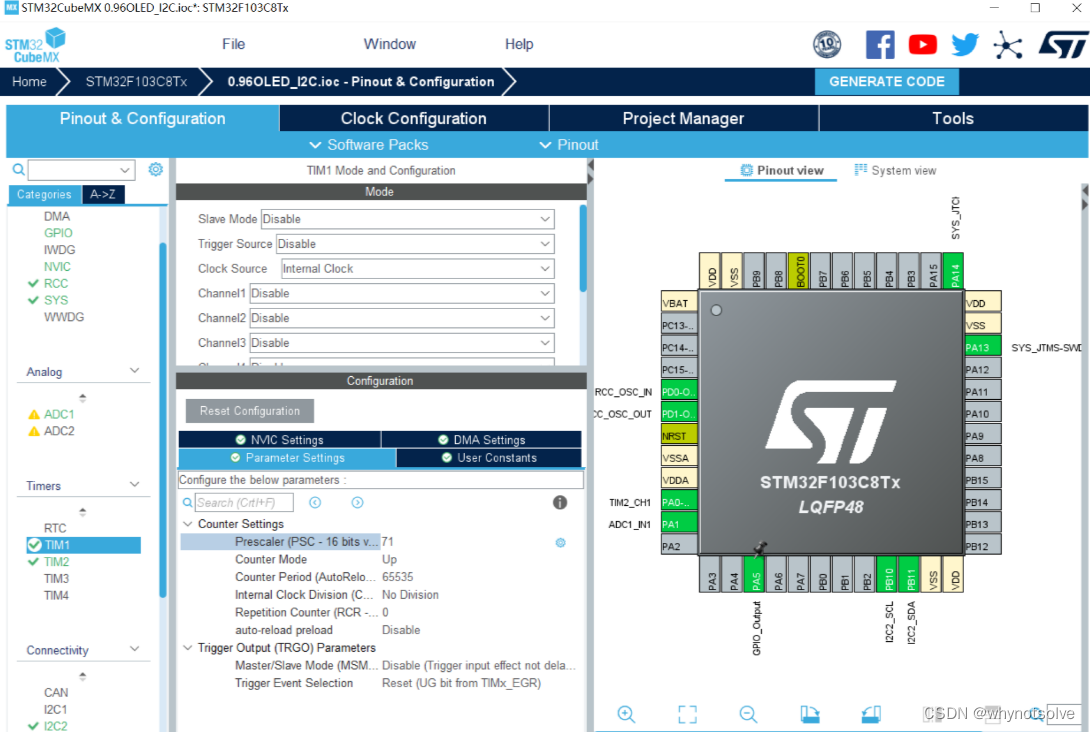
超声波模块代码:
HC-SR04.h:
#ifndef HCSR04_H_
#define HCSR04_H_
#include "main.h"
#include "delay.h"
typedef struct
{
uint8_t edge_state;
uint16_t tim_overflow_counter;
uint32_t prescaler;
uint32_t period;
uint32_t t1; // 上升沿时间
uint32_t t2; // 下降沿时间
uint32_t high_level_us; // 高电平持续时间
float distance;
TIM_TypeDef* instance;
uint32_t ic_tim_ch;
HAL_TIM_ActiveChannel activ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7982
7982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









