numpy 创建默认值数组创建方阵获 200312
最新推荐文章于 2024-03-20 18:49:25 发布




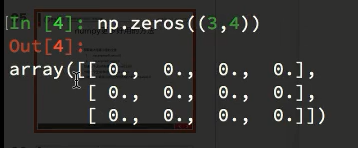
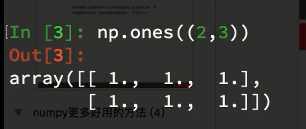
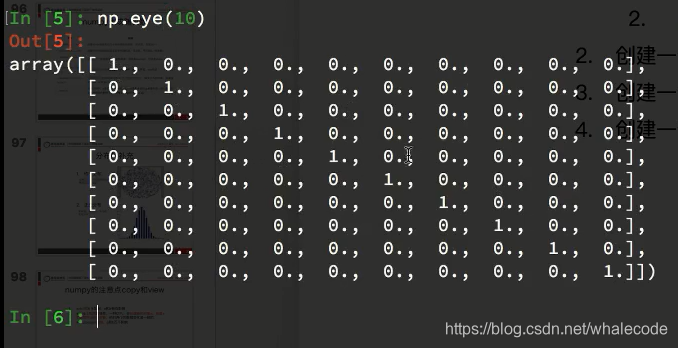
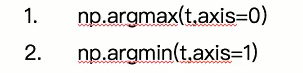
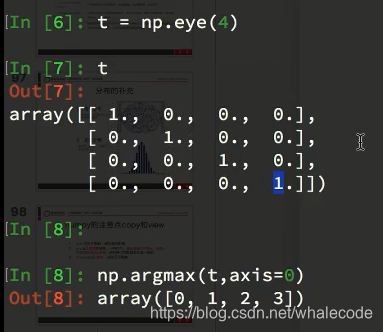
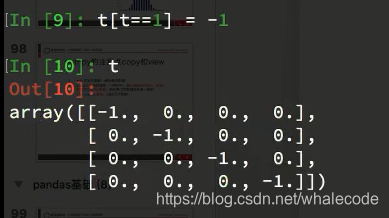
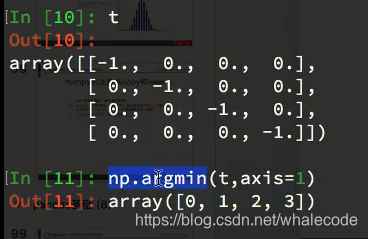
 本文介绍如何使用NumPy库创建特定类型的数组,包括全零、全一及对角线为1的方阵,并演示了如何进行数组值的修改与获取最大、最小值位置的操作。
本文介绍如何使用NumPy库创建特定类型的数组,包括全零、全一及对角线为1的方阵,并演示了如何进行数组值的修改与获取最大、最小值位置的操作。
本文介绍如何使用NumPy库创建特定类型的数组,包括全零、全一及对角线为1的方阵,并演示了如何进行数组值的修改与获取最大、最小值位置的操作。
本文介绍如何使用NumPy库创建特定类型的数组,包括全零、全一及对角线为1的方阵,并演示了如何进行数组值的修改与获取最大、最小值位置的操作。
 2462
2462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言