






前置思路:
主要通过输出比较OC。
再通过调节CRR,在过程中改变占空比。( TIM_SetComparex(); )
ARR : Auto Reloading Register(自动重装寄存器)
CCR :Compare Capture Register (比较寄存器)
额外细节:
1.GPIO要启用复用推挽模式
2.调节频率,脉冲数就越多,电流波形的平滑性就越好,但不影响占空比,对显示区别不大。
3.注意查看输出所对应的引脚
针对LED呼吸灯,舵机,电机配置的细微区别
舵机:
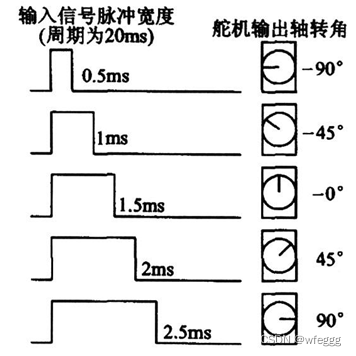
1.棕色线为GND
2.合理配置参数,例:
ARR = 200 -1; PSC = 720 - 1; --> 每个周期 20 ms
定时器每计一个数为 20ms / ARR = 0.1ms
因此,ARR 与角度Angle 的关系为:
ARR = (Angle / 180) * (25 - 5) + 5
SetCompare((Angle/180)*20 + 5);LED呼吸灯:
无
电机:
正负反映转动方向
代码呈现:
配置输出比较
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //将引脚的控制权给到片上外设
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //查表得TIM2_CH1的输出引脚为PA0
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_InitStructure;
TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_InitStructure.TIM_Period = 100 - 1; //ARR
TIM_InitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_InitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_InitStructure);
TIM_ClearFlag(TIM2,TIM_IT_Update);
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure); //使该结构体下都赋有默认初值
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
TIM_OC1Init(TIM2,&TIM_OCInitStructure);
TIM_Cmd(TIM2,ENABLE);
}
调节CRR
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM2,Compare);
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









