





 惊群是指多进程在等待同一资源时,资源出现时所有进程被唤醒,造成不必要的上下文切换和资源争抢。本文深入探讨了Linux内核中的惊群现象,分析了nginx的accept_mutex、NGX_EXCLUSIVE_EVENT和reuseport等解决方案。其中,reuseport通过哈希分配新连接,实现负载均衡,而NGX_EXCLUSIVE_EVENT仅唤醒一个进程,减少上下文切换。accept_mutex则通过应用层锁控制资源访问,但可能导致负载不均。
惊群是指多进程在等待同一资源时,资源出现时所有进程被唤醒,造成不必要的上下文切换和资源争抢。本文深入探讨了Linux内核中的惊群现象,分析了nginx的accept_mutex、NGX_EXCLUSIVE_EVENT和reuseport等解决方案。其中,reuseport通过哈希分配新连接,实现负载均衡,而NGX_EXCLUSIVE_EVENT仅唤醒一个进程,减少上下文切换。accept_mutex则通过应用层锁控制资源访问,但可能导致负载不均。
惊群比较抽象,类似于抢红包 😁。它多出现在高性能的多进程/多线程服务中,例如:nginx。
探索惊群 系列文章将深入 Linux (5.0.1) 内核,透过 多进程模型 去剖析惊群现象、惊群原理、惊群的解决方案。
文章来源:探索惊群 ①
- 探索惊群 ①
- 探索惊群 ② - accept
- 探索惊群 ③ - nginx 惊群现象
- 探索惊群 ④ - nginx - accept_mutex
- 探索惊群 ⑤ - nginx - NGX_EXCLUSIVE_EVENT
- 探索惊群 ⑥ - nginx - reuseport
- 探索惊群 ⑦ - 文件描述符透传
1. 概述
1.1. 惊群现象
多进程睡眠等待 共享 资源,当资源到来时,多个进程被 无差别 唤醒,争抢处理资源。
1.2. 惊群影响
惊群导致软件系统工作效率低下:
- 部分进程被频繁唤醒却获取资源失败,导致进程上下文频繁切换,系统资源开销大。
- 多进程争抢共享资源,有的抢得多,有的抢得少,资源分配不均。
1.3. 惊群原因
进程睡眠 唤醒 时机问题,详细请参考:探索惊群 ③ - nginx 惊群现象
2. 解决方案
需要围绕两个方面去展开。
- 避免共享资源争抢(独占)。
- 资源尽量合理分配。
换个角度去思考,如果红包私发,而不是扔进群组里… 这个思路应该是解决惊群问题的关键。😎
我们可以参考 nginx 解决惊群问题的经典方案:
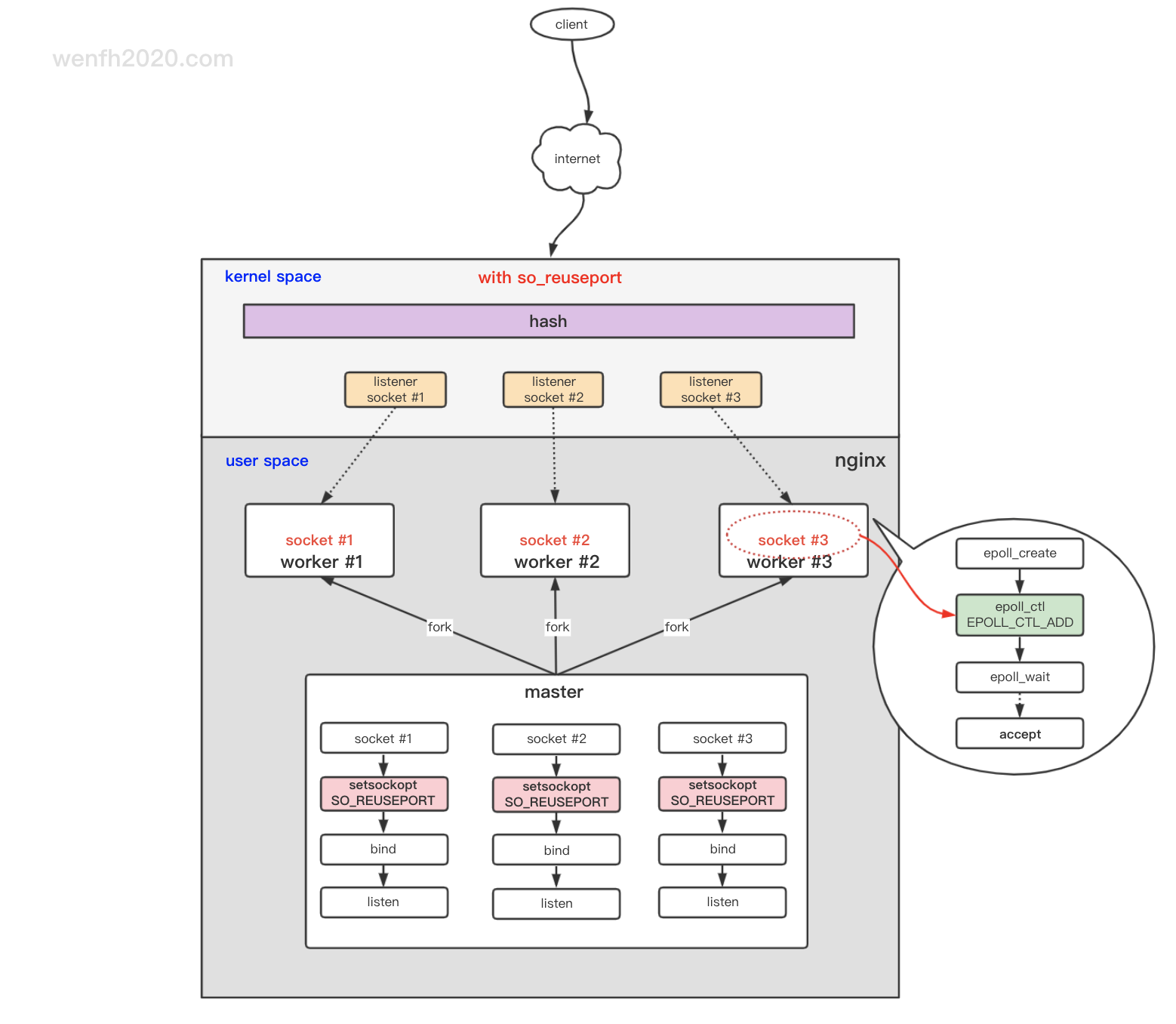
2.1.1. reuseport
内核解决惊群问题,目前 nginx 最好的惊群解决方案,基于 linux 内核 so_reuseport 端口重用网络特性。
- 每个子进程拥有独立的 listen socket 资源队列,避免资源争抢;多个队列也提升了并发吞吐。
- 新链接通过网络四元组通过哈希分配到各个子进程的 listen socket 资源队列,资源分配相对合理(负载均衡)。
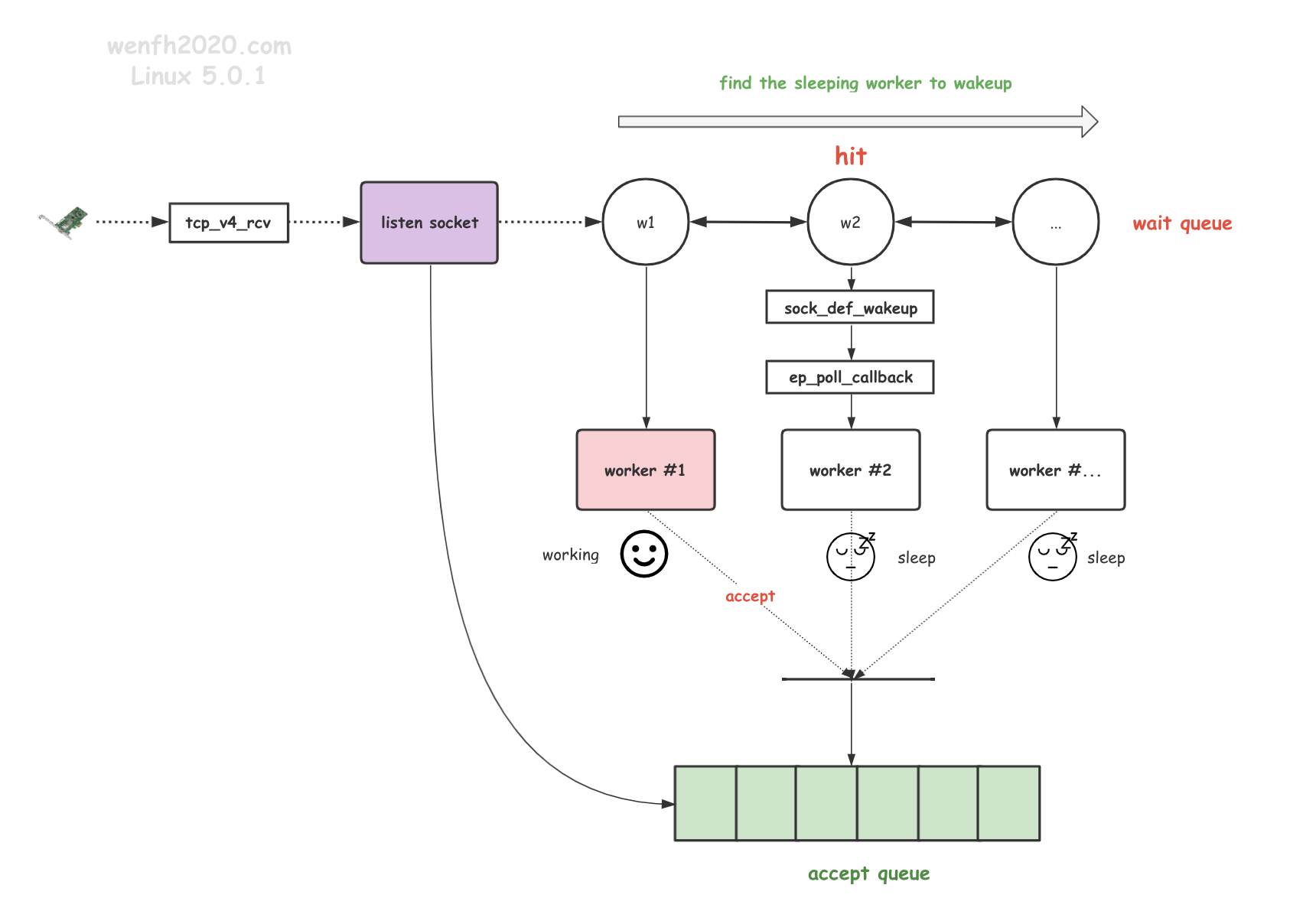
2.1.2. NGX_EXCLUSIVE_EVENT
内核解决惊群问题,基于 linux 4.5+ 内核增加的 epoll 属性 EPOLLEXCLUSIVE 独占资源属性。
原理非常简单,只唤醒一个睡眠等待的进程处理资源。避免无差别地唤醒多个进程,尽量使得各个进程忙碌起来。
缺点:
- 多个进程争抢一个 listen socket 的共享资源。
- 单个资源队列,将会是并发吞吐瓶颈。
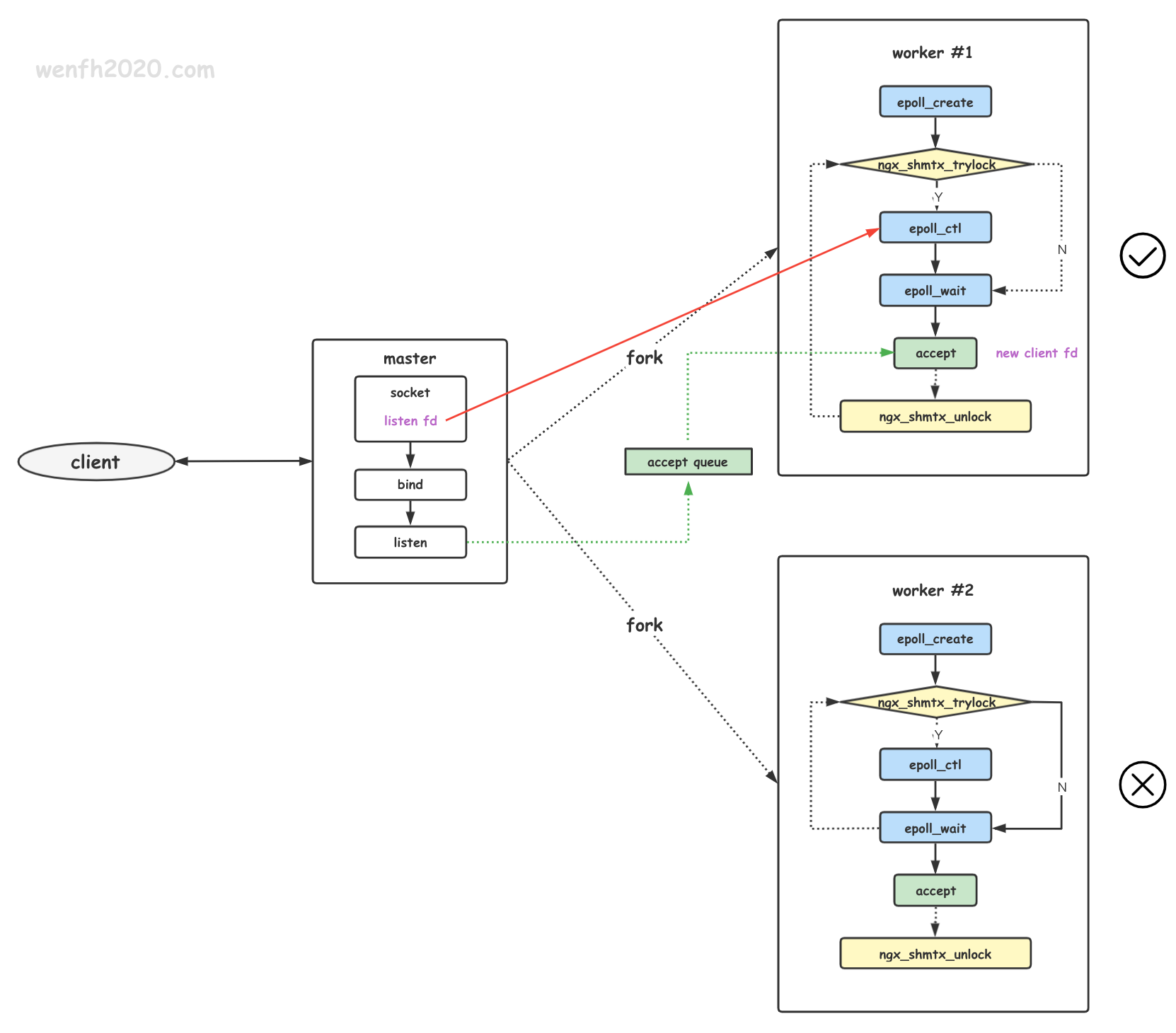
2.1.3. accept_mutex
应用层解决惊群问题,多个子进程通过应用层抢锁,成功者可以独占 listen socket 获取资源的权利。
优点:有效地避免了惊群。
缺点:
- 因为抢锁时机问题,原来抢到锁的进程下次抢到锁的几率很高,导致有些进程很忙,有些没那么忙,负载不均,资源利用率比较低。
- 一个时间段内,只有一个子进程独占 listen socket 的共享资源,无法同时利用多核优势。
- 单个资源队列,将会是并发吞吐瓶颈。

















 846
846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









