






 本文详细介绍了模糊控制器的基本概念,包括模糊化、模糊规则库、推理机制和解模糊化过程。分类讨论了状态反馈、输出反馈、基于观测器的反馈、开关/滑动模式、采样控制器以及自适应控制器的特点和应用场景。
本文详细介绍了模糊控制器的基本概念,包括模糊化、模糊规则库、推理机制和解模糊化过程。分类讨论了状态反馈、输出反馈、基于观测器的反馈、开关/滑动模式、采样控制器以及自适应控制器的特点和应用场景。
一、模糊控制器的基本概念
模糊控制器是一个基于模糊规则的决策系统,用于根据输入变量的模糊值来生成相应的输出控制信号。
TS模糊模型的模糊控制器由以下几个主要组成部分构成:
-
模糊化:将输入变量的实际值映射为对应的隶属度函数值,即确定输入变量在各个模糊集合中的隶属度程度。
-
模糊规则库:包含了一系列模糊规则,每条规则都描述了输入变量和输出变量之间的关系。通常采用IF-THEN形式,其中IF部分表示输入变量的条件,THEN部分表示输出变量的结论。
-
模糊推理机制:根据模糊规则库中的规则和输入变量的隶属度值,通过模糊推理来得到模糊输出结果。常见的模糊推理方法有Mamdani模糊推理和TSK模糊推理。
-
解模糊化:将模糊输出结果转化为实际的控制信号。解模糊化过程通常采用加权平均、中心法或者其他数学方法来确定最终的输出结果。
通过不断优化模糊规则库的规模和优化解模糊化方法,可以提高模糊控制器的性能和控制精度。
二、模糊控制器的分类
模糊控制器大致分为以下几类:
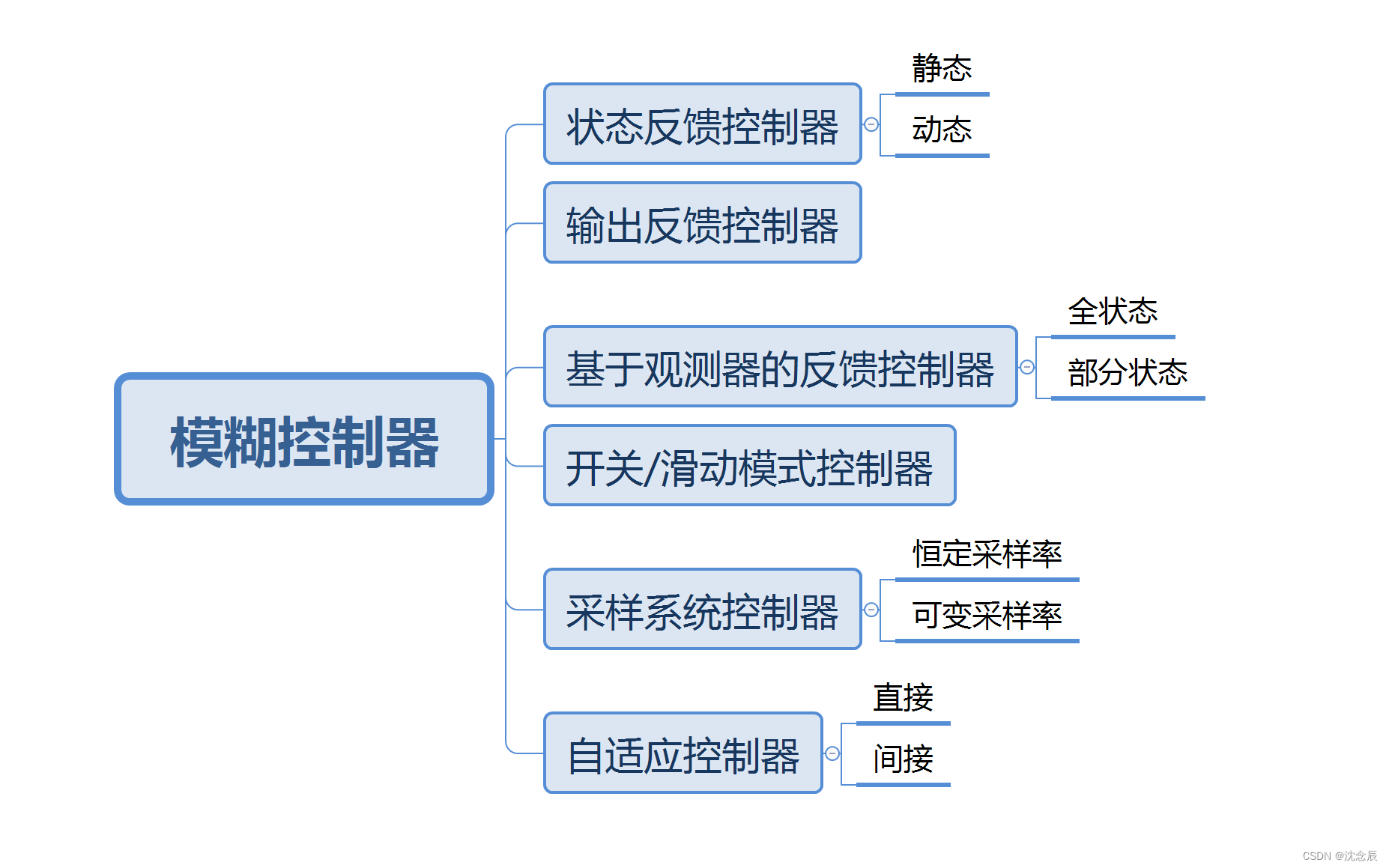
(1)状态反馈控制器
1)概念
在传统的模糊控制器中,通常采用开环控制方式,即将输入变量的模糊值通过模糊推理得到输出变量的模糊值,并直接转化为实际的控制信号。然而,这种开环控制方式难以对系统的状态进行精确控制。为了提高系统的控制性能和精度,引入状态反馈控制器(State Feedback Controller)可以对系统状态进行精确控制。状态反馈控制器是一种基于系统状态的反馈信息来调节控制行为的控制器。
2)静态与动态的关系
在模糊控制器中,状态反馈控制器可以分为静态状态反馈和动态状态反馈两种类型。
①静态状态反馈:静态状态反馈是指状态反馈控制器仅使用当前系统状态的信息来生成控制信号,而不考虑状态的变化率。
静态状态反馈控制器的设计是基于系统的稳定性和平衡点的假设。它通常通过解代数稳定性问题或者线性矩阵不等式来确定状态反馈增益,使得系统状态能够收敛到期望状态。
②动态状态反馈:动态状态反馈是指状态反馈控制器不仅使用当前系统状态的信息,还考虑状态的变化率。
动态状态反馈控制器的设计需要考虑系统的动态特性和稳定性。它通常基于系统的状态空间模型,通过解决状态反馈控制器的动态特性,使得系统的状态能够随着时间的演化收敛到期望状态。
区别:
- 静态状态反馈控制器只考虑当前系统状态的信息,适用于系统运行稳定、无需考虑状态变化率的情况。
- 动态状态反馈控制器考虑了系统状态变化率的影响,能够更准确地调节系统的动态响应和稳定性。
个人理解:
当系统具有较快的动态响应或者存在较大的外部干扰,就需要动态反馈来控制,面对一些简单的情况,静态已经足够了,就没必要大材小用了,毕竟静态的设计和实现还更简单些。
(2)输出反馈控制器
在模糊控制器中,输出反馈控制器是一种使用系统的输出信息来调节控制行为的控制器。与状态反馈控制器不同,输出反馈控制器仅使用系统的输出信号作为反馈信息,而不需要具体的系统状态信息。
不过这样无法获得更完整的状态信息,局限性太大。
(3)基于观测器的反馈控制器
在模糊控制器中,基于观测器的反馈控制器是一种使用系统状态观测器来估算系统状态的反馈控制器。与传统的状态反馈控制器不同,基于观测器的反馈控制器无需直接测量系统状态,而是通过观测器来估算状态。
其包括两个主要部分:状态观测器和状态反馈控制器。状态观测器用于估算系统状态,而状态反馈控制器根据观测器估算的状态值和期望的状态值生成控制信号。
状态观测器通常基于系统的输出信号和控制输入信号设计,可以使用卡尔曼滤波器、扩展卡尔曼滤波器等方法来实现。状态反馈控制器通常基于系统状态空间模型设计,可以使用线性矩阵不等式(LMI)、H∞控制等方法来设计和分析。
与传统的状态反馈控制器相比,基于观测器的反馈控制器不需要直接测量系统状态,只需要估算状态即可。这样可以简化系统的结构,减少系统成本和复杂度,并提高控制系统的可靠性和性能。
(4)开关/滑动模式控制器
在模糊控制器中,开关/滑动模式控制器是一种基于模糊逻辑和滑动模式控制思想相结合的控制器。它可以使用模糊推理实现控制信号的生成,同时使用滑动模式控制思想来确保控制系统的稳定性和鲁棒性。
开关/滑动模式控制器主要包括两个部分:模糊控制器和滑动模式控制器。模糊控制器根据系统输入和输出信息进行模糊推理,生成控制信号。滑动模式控制器则根据系统动态方程和滑动界面设计生成滑动控制信号,并将该信号作为模糊控制器的输入参考值。
开关/滑动模式控制器具有以下特点:结构简单、鲁棒性强、可适应性强、易于实现。
但这个控制器作为高频开关元件,会出现抖振效应,虽然可以通过采用饱和函数替代硬开关组件来缓解抖振,但可能会导致产生稳态误差。
(5)采样控制器
采样数据模糊控制器由采样器、离散模糊控制器和零阶保持器(ZOH)组成,流程框图如下:

我们取非线性对象的系统状态向量x(t)作为输入,经过采样器之后,得到一个x(KT)的样本,文献中提到的采样器也分为两种,分别是有恒定采样率和有可变采样率的采样器。采到样本后,将采样的系统状态向量x(KT)经过离散时间模糊控制器处理,得到控制向量u(KT),在经过ZOH后,得到控制向量u(t),采用这个向量进行控制过程。
但采样毕竟给系统引入了不连续性,与连续时间FMB控制系统相比,分析变得更为困难。
(6)自适应控制器
自适应模糊控制器是一种能够实时调整其模糊规则和参数的模糊控制系统。它通过监测反馈信号并根据系统状态的变化来自动调整模糊规则和参数,以提高控制性能和适应不确定性。
自适应模糊控制器通常由三个主要部分组成:模糊控制器、自适应机制和辨识机制。
1)模糊控制器:自适应模糊控制器使用基于模糊逻辑的规则库来生成模糊控制信号。它接收系统状态和误差信号作为输入,并将其模糊化处理得到模糊集合。然后,基于模糊规则进行推理,生成模糊的控制输出。最后,经过去模糊化处理,将模糊输出转换为具体的控制信号。
2)自适应机制:自适应模糊控制器中的自适应机制用于实时调整模糊控制器的模糊规则和参数。这可以基于系统状态、误差信号和反馈信息来进行调整。常见的自适应方法包括模糊参数自适应和模糊规则自适应。
①模糊参数自适应:通过监测系统性能指标,如误差的大小、稳定性等,自适应地调整模糊控制器中的模糊集合参数。这样可以使模糊控制器更好地适应系统的变化。
②模糊规则自适应:通过在线学习方法,如神经网络、遗传算法等,根据系统的反馈信息和期望输出来自适应地调整模糊控制器的规则库。这样可以使模糊规则更准确地描述系统的动态特性。
3)辨识机制:自适应模糊控制器中的辨识机制用于估计系统的动态模型或非线性函数。这对于模糊参数自适应和模糊规则自适应非常重要,因为它提供了必要的信息来进行自适应调整。辨识机制通常使用系统的输入/输出数据来建立模型或估计函数,并且可以结合实时的反馈信号进行更新。
自适应模糊控制器具有灵活性和适应性强的特点,它能够较好地处理系统中的不确定性、非线性和时变性。

















 8576
8576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









