







对于动态规划类型的题目,可以从以下角度去思考问题
1. 状态表示
机器人在每一个网格节点的状态 dp[i][j] ,可以理解从 起始点 为走到 [i,j] ,一共有多少种方式;
2. 状态转移方程
结合题意,机器人只可以往下走或者往右走,那么其实可以这样来理解:
图中的 robot 的位置,只能从 位置1 和 位置2 过来,那么换一个角度思考,从 起始点 到 robot 的位置的路径数,其实就是 起始点 到 位置1 的路径数 + 起始点 到 位置2 的路径数;
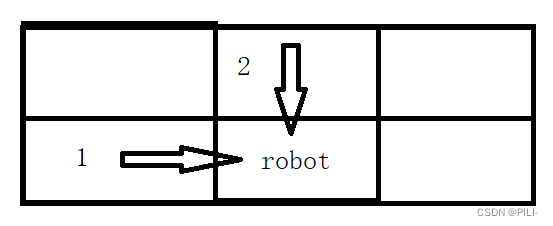
也就可以写成转换方程:dp[i][j] = dp[i-1][j] (起始点到位置2的路径数) + dp[i][j-1] (起始点到位置1的路径数)
3. 初始化
进行初始化表格,在这个步骤中,就需要去填入一些初始节点的对应值
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











