







 本文是一份关于如何制作‘吃东西的垃圾桶机器人’的详细教程,涵盖了材料准备、硬件组装、软件设置和调试过程。主要材料包括Arduino Nano、MG90S舵机、红外测距传感器等,通过3D打印部件完成机器人结构。教程适合电子科技爱好者,即便没有基础也能跟随指导完成制作。
本文是一份关于如何制作‘吃东西的垃圾桶机器人’的详细教程,涵盖了材料准备、硬件组装、软件设置和调试过程。主要材料包括Arduino Nano、MG90S舵机、红外测距传感器等,通过3D打印部件完成机器人结构。教程适合电子科技爱好者,即便没有基础也能跟随指导完成制作。
前言
博主目前处于电子科技类小项目摸索阶段,于是想找一些好玩的arduino小玩具做一做,练练手。恰好在b站看到了“吃东西的垃圾桶机器人”搬运视频,了解发现,原版是来自外网的一篇教程文章,所以想着自己写一份中文教程留档。经历九九八十一难(其实也没有多少难哈哈哈哈哈哈哈),终于在几小时后一个呆傻小玩具腾空出世——
演示视频
话不多说,开整!
材料准备
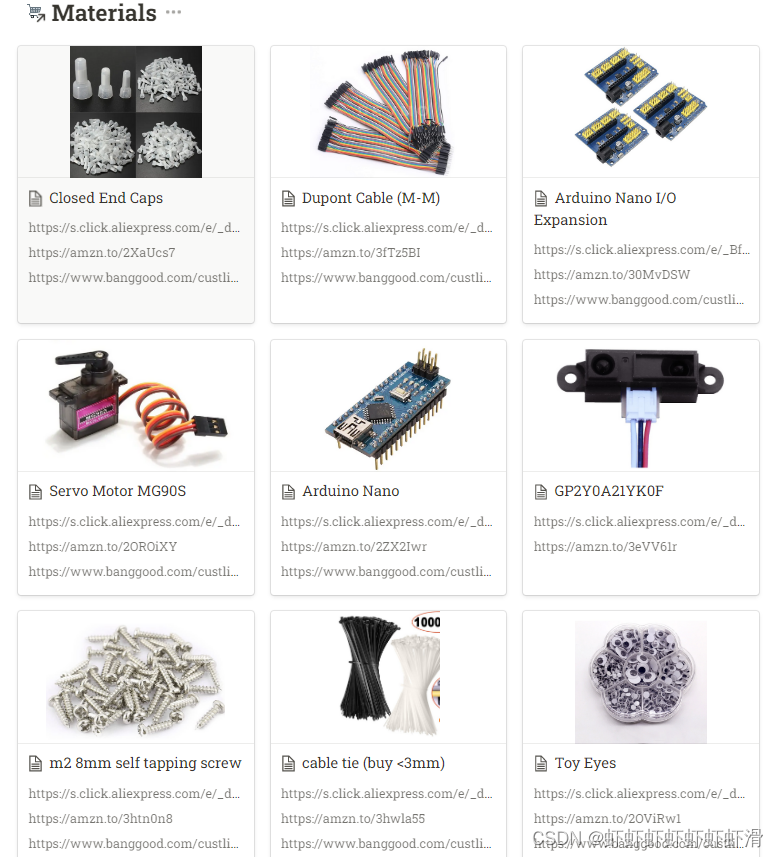
首先呢,我们先看一下官方给的材料要求:
实际上,对于第一个和第三个原件,我并没有准备,且在实际操作中并没有用到,所以可以忽略。
为了方便购买,翻译一下,从左到右依次是:
- 封闭端盖(未用到)
- 杜邦线(母对母)
- Arduino Nano扩展版(未用到)
- MG90S舵机
- Arduino Nano开发板
- GP2Y0A21YK0F 红外测距传感器
- M2×8螺丝
- 自锁式尼龙扎带(<3mm)
- 活动眼珠
当然了,还需要3D打印机器人的身体,图纸在本文末尾,可自行查找打印。
好,一切准备齐全之后,我们就进行硬件组装吧~
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









