






1. OpenCV简介
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,它提供了丰富的图像处理和计算机视觉功能。该库由英特尔公司发起,并在 BSD 许可证下发布,因此它是免费的,且开放源代码。

OpenCV完全由C++开发,提供C++和Python两套接口。
官方文档:
https://docs.opencv.org/4.5.2/![]() https://docs.opencv.org/4.5.2/
https://docs.opencv.org/4.5.2/
Qt是兼容C++的,且提供了UI界面,因此调用OpenCV进行图像处理非常合适。
2. 环境搭建
需要注意,本地提供的OpenCV版本3.4仅限于与Qt 5.4配套,其他版本需要自行配套。
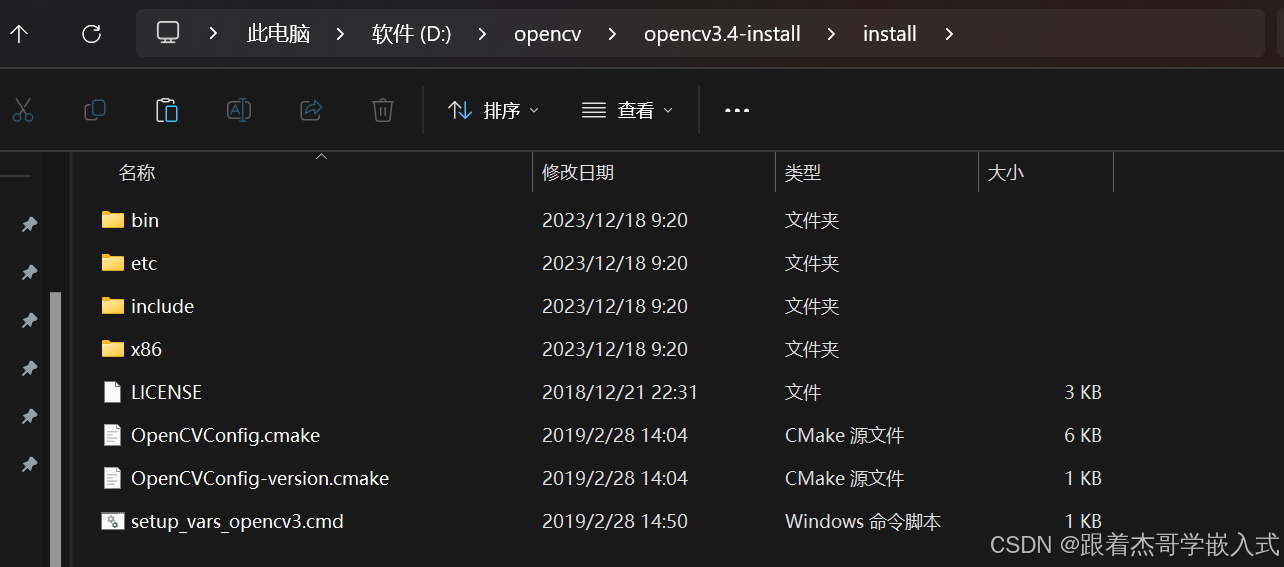
1. 解压缩到D盘,目录如下图所示,一定要注意文件夹的层级,尽量完全相同!!!
2. 进入Win的“我的电脑”,鼠标右键,点击“属性”。
3. 搜索并进入“编辑系统环境变量”。

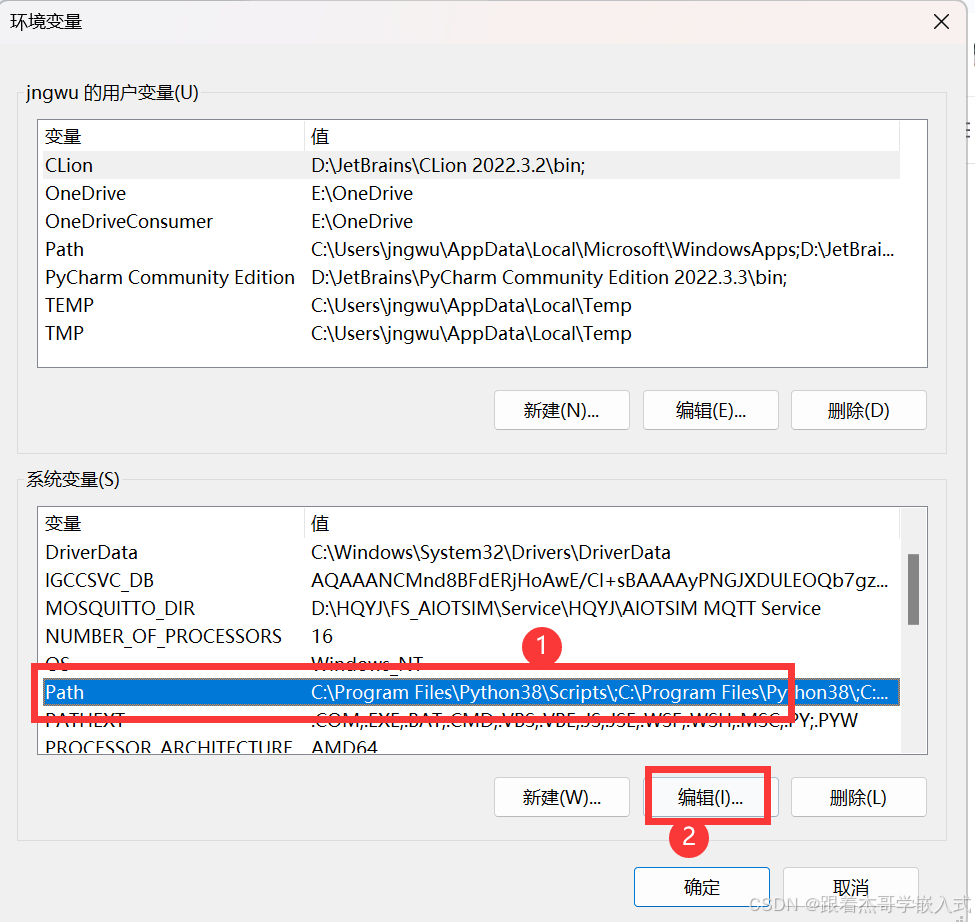
4. 在弹出的窗口中点击“环境变量”。

5. 在系统变量的Path中点击“编辑”。
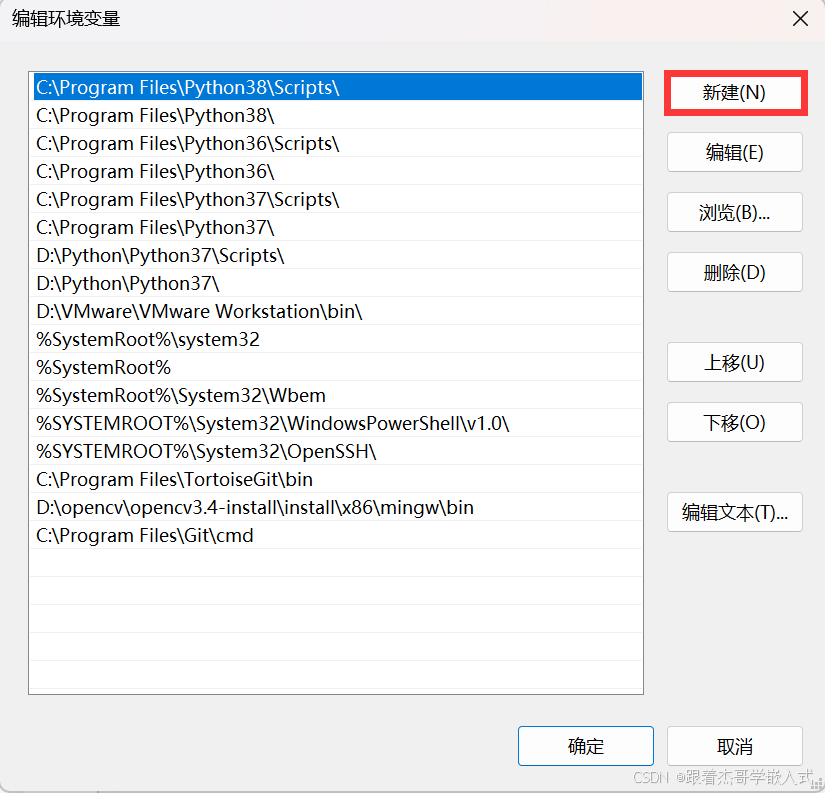
6. 在弹出的窗口中点击“新建”。
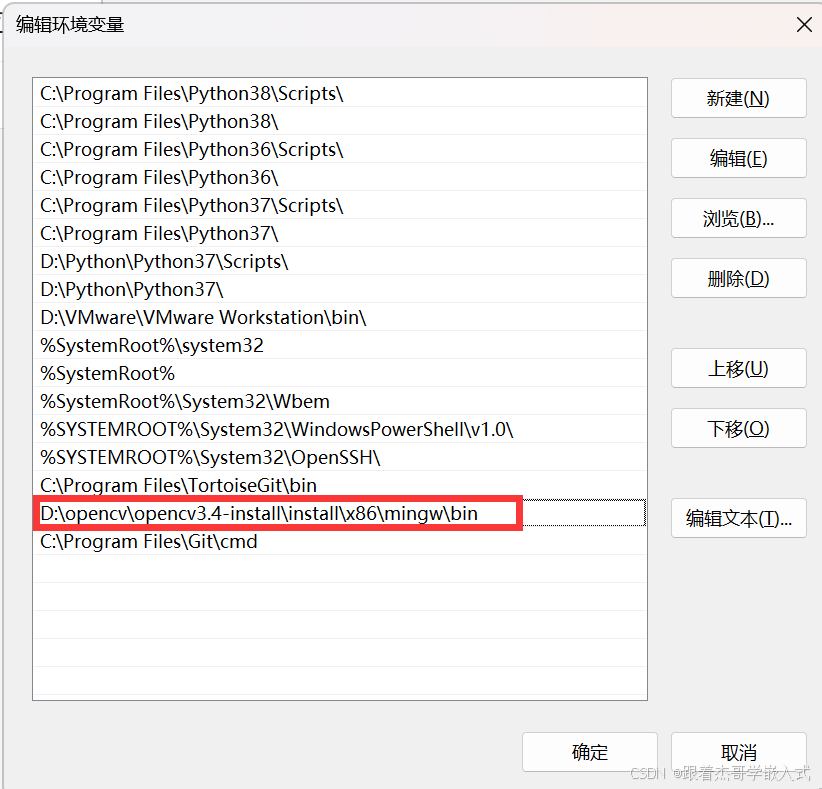
7. 在光标编辑处,粘贴之前OpenCV的本地路径:
D:\opencv\opencv3.4-install\install\x86\mingw\bin
8. 逐级确定,设置完成。
9. 重新启动电脑。
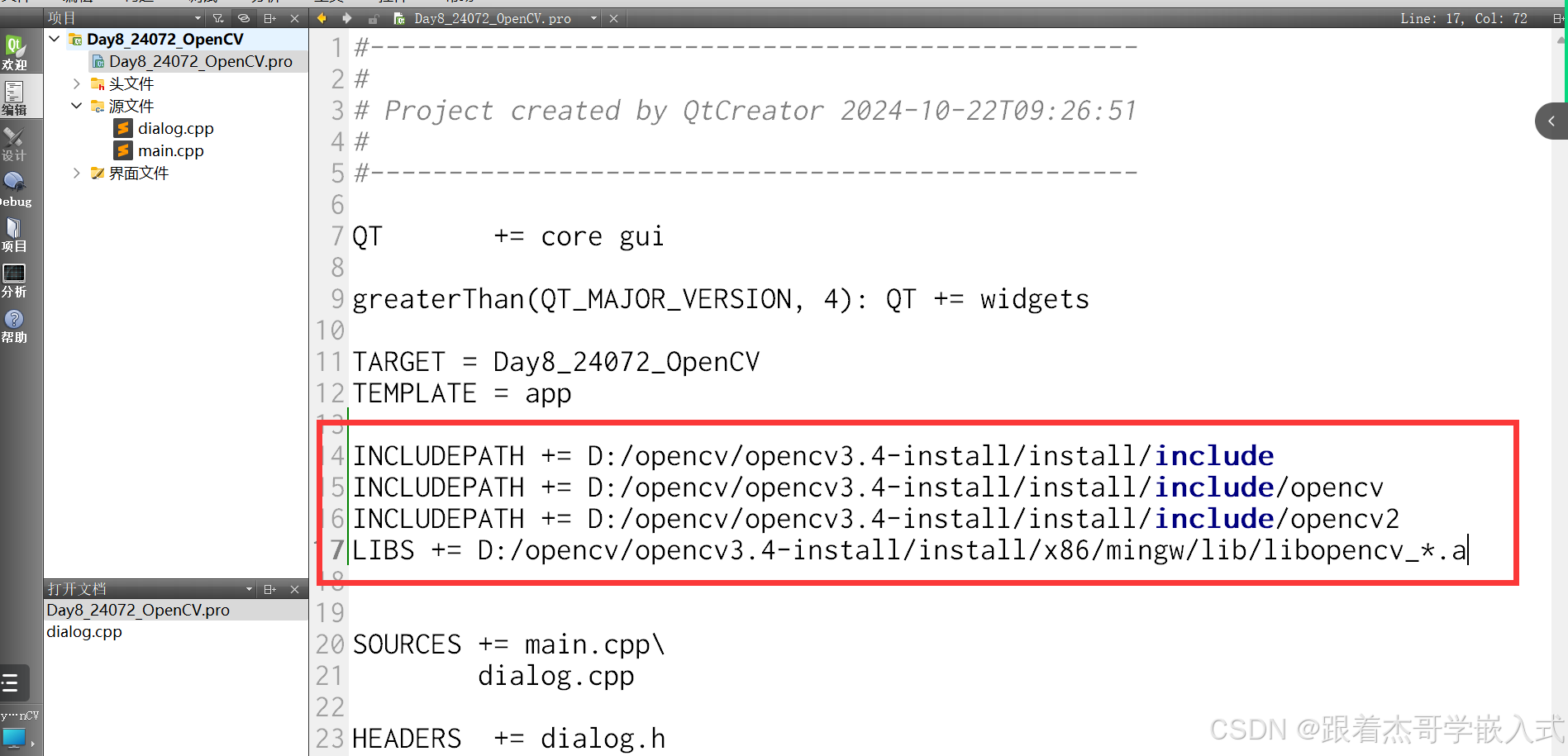
10. 新建一个Qt项目验证环境搭建的有效性,新建Qt项目后,在.pro文件中添加OpenCV的路径。
INCLUDEPATH += D:/opencv/opencv3.4-install/install/include
INCLUDEPATH += D:/opencv/opencv3.4-install/install/include/opencv
INCLUDEPATH += D:/opencv/opencv3.4-install/install/include/opencv2
LIBS += D:/opencv/opencv3.4-install/install/x86/mingw/lib/libopencv_*.a
11. 在main.cpp中编写一个示例程序验证OpenCV。
main.cpp
#include "dialog.h"
#include <QApplication>
#include <QDebug>
// hpp是C++独享的头文件
#include <opencv2/opencv.hpp> // OpenCV的头文件
using namespace cv; // 使用名字空间
int main(int argc, char *argv[])
{
// 图像在OpenCV中是三维数组(矩阵 Matrix)
Mat src; // 数组对象
// 读取的图像默认路径在构建目录
src = imread("berry_island.png");
// 如果读取不到
if(!src.data)
{
qDebug() << "读取失败!";
return -1;
}
// 读取成功弹窗展示图片
namedWindow("input image",CV_WINDOW_AUTOSIZE);
// 在窗口中展示图片
// 参数1:一定要跟上面的窗口名称相同
// 参数2:要展示的图片
imshow("input image",src);
// 阻塞保持持续显示,直到按键
waitKey(0);
return 0;
}
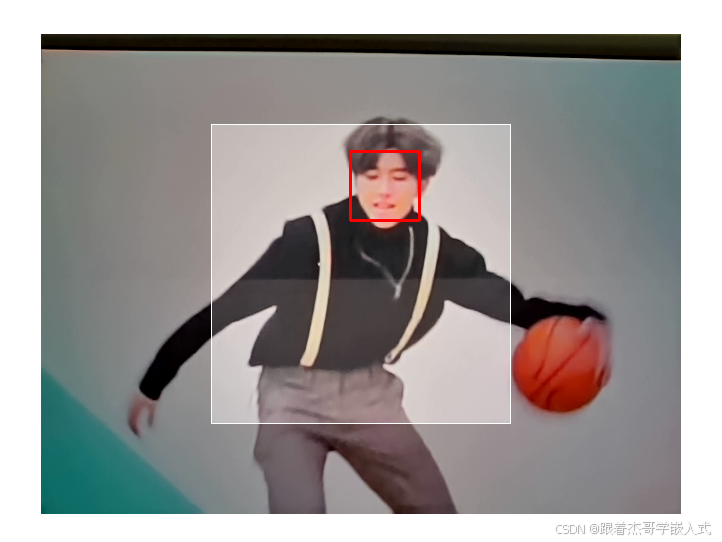
3. 人脸检测
1. 使用OpenCV获取摄像头数据。
2. 使用OpenCV自带的数据模型初始化级联分类器。
3. 中心区域图像裁切 + 灰度处理
4. 通过原始图像与级联分类器对比找到人脸区域并绘制矩形框
通过网盘分享的文件:Day8_24072_Detect (3).zip
链接: https://pan.baidu.com/s/1CTvhAZGodoIO-GeGz0W-cA 提取码: 8ayf
--来自百度网盘超级会员v7的分享

















 1880
1880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









