






主要是ov5640的图像采集,最终通过DDR3输出到LCD屏幕上,整个代码最重要的是8位数据转16位RGB565数据的拼接部分,要保证信号的同步控制,减少时钟域交叉。以及帧与帧之间等待10帧保证数据的稳定。
module cmos_capture_data(
input rst_n , //复位信号
//摄像头接口
input cam_pclk , //cmos 数据像素时钟
input cam_vsync , //cmos 场同步信号
input cam_href , //cmos 行同步信号, //也可以认为是像素有效信号
input [7:0] cam_data , 数据信号,8位的,每两个数据拼接成一个16位的有效像素点
//用户接口
output cmos_frame_vsync , //帧有效信号
output cmos_frame_href , //行有效信号
output cmos_frame_valid , //数据有效使能信号
output [15:0] cmos_frame_data //有效数据
);
//寄存器全部配置完成后,先等待10帧数据
//待寄存器配置生效后再开始采集图像
parameter WAIT_FRAME = 4'd10 ; //寄存器数据稳定等待的帧个数
//reg define
reg cam_vsync_d0 ;
reg cam_vsync_d1 ;
reg cam_href_d0 ;
reg cam_href_d1 ;
reg [3:0] cmos_ps_cnt ; //等待帧数稳定计数器
reg [7:0] cam_data_d0 ;
reg [15:0] cmos_data_t ; //用于8位转16位的临时寄存器
reg byte_flag ; //16位RGB数据转换完成的标志信号
reg byte_flag_d0 ;
reg frame_val_flag ; //帧有效的标志
wire pos_vsync ; //采输入场同步信号的上升沿 //标识新一帧图像开始的一个信号
//*****************************************************
//** main code
//*****************************************************
//采输入场同步信号的上升沿
assign pos_vsync = (~cam_vsync_d1) & cam_vsync_d0;
//输出帧有效信号
assign cmos_frame_vsync = frame_val_flag ? cam_vsync_d1 : 1'b0;
//输出行有效信号
assign cmos_frame_href = frame_val_flag ? cam_href_d1 : 1'b0;
//输出数据使能有效信号
assign cmos_frame_valid = frame_val_flag ? byte_flag_d0 : 1'b0;
//输出数据 cmos_frame_data即565数据
assign cmos_frame_data = frame_val_flag ? cmos_data_t : 1'b0;
//打拍的作用是为了抓取摄像头场同步信号和行同步信号的上升沿,以及输出帧有效信号
always @(posedge cam_pclk or negedge rst_n) begin
if(!rst_n) begin
cam_vsync_d0 <= 1'b0;
cam_vsync_d1 <= 1'b0;
cam_href_d0 <= 1'b0;
cam_href_d1 <= 1'b0;
end
else begin
cam_vsync_d0 <= cam_vsync;
cam_vsync_d1 <= cam_vsync_d0;
cam_href_d0 <= cam_href;
cam_href_d1 <= cam_href_d0;
end
end
//对帧数进行计数
always @(posedge cam_pclk or negedge rst_n) begin
if(!rst_n)
cmos_ps_cnt <= 4'd0;
else if(pos_vsync && (cmos_ps_cnt < WAIT_FRAME))
cmos_ps_cnt <= cmos_ps_cnt + 4'd1;
end
//帧有效标志
always @(posedge cam_pclk or negedge rst_n) begin
if(!rst_n)
frame_val_flag <= 1'b0;
else if((cmos_ps_cnt == WAIT_FRAME) && pos_vsync) //十帧的等待和新的一帧的到来
frame_val_flag <= 1'b1;
else;
end
//8位数据转16位RGB565数据 //拼接数据
always @(posedge cam_pclk or negedge rst_n) begin
if(!rst_n) begin
cmos_data_t <= 16'd0;
cam_data_d0 <= 8'd0;
byte_flag <= 1'b0; //16位RGB数据转换完成的标志信号
end
else if(cam_href) begin //行同步信号
byte_flag <= ~byte_flag;
cam_data_d0 <= cam_data;
if(byte_flag)
cmos_data_t <= {cam_data_d0,cam_data};
else;
end
else begin
byte_flag <= 1'b0;
cam_data_d0 <= 8'b0;
end
end
//产生输出数据有效信号(cmos_frame_valid)
always @(posedge cam_pclk or negedge rst_n) begin
if(!rst_n)
byte_flag_d0 <= 1'b0;
else
byte_flag_d0 <= byte_flag;
end
endmodule时序图草稿:

利用ILA抓取信号分析:
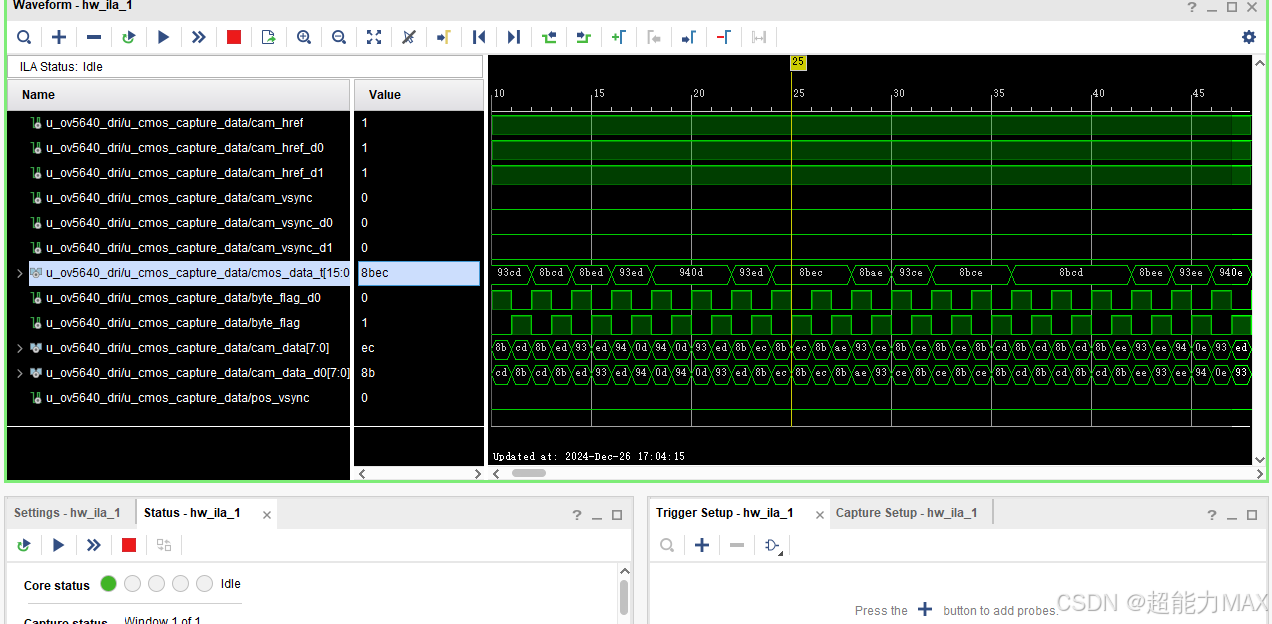 发现拼接符合数据同步的需求
发现拼接符合数据同步的需求


















 3360
3360

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









